(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПОЛОСЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования натяжения полосы | 1985 |
|
SU1258541A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ НАСТРОЙКИ СКОРОСТЕЙ СМЕЖНЫХ КЛЕТЕЙ ШИРОКОПОЛОСНОГО СТАНА ГОРЯЧЕЙ ПРОКАТКИ ПО ЗАДАННОМУ МЕЖКЛЕТЕВОМУ НАТЯЖЕНИЮ ПОЛОСЫ И ВЕЛИЧИНЕ ПЕТЛИ | 1998 |
|
RU2126304C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ДИНАМИЧЕСКОГО ТОКА ЭЛЕКТРОПРИВОДА ПЕТЛЕДЕРЖАТЕЛЯ | 1998 |
|
RU2136418C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МЕЖКЛЕТЕВОГО НАТЯЖЕНИЯ ПОЛОСЫ | 1999 |
|
RU2147951C1 |
| Устройство стабилизации натяжения и толщины полосы | 1978 |
|
SU780918A1 |
| Электропривод для петледержателя на непрерывном листовом стане горячей прокатки | 1982 |
|
SU1073869A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПОЛОСЫ В МЕЖКЛЕТЕВОМ ПРОМЕЖУТКЕ ШИРОКОПОЛОСНОГО СТАНА ГОРЯЧЕЙ ПРОКАТКИ | 2010 |
|
RU2446026C2 |
| Способ автоматического управления электроприводами петледержателей чистовой непрерывной группы клетей стана горячей прокатки | 1982 |
|
SU1041189A2 |
| Многодвигательный электропривод валков непрерывного стана холодной прокатки | 1986 |
|
SU1387162A1 |
| Устройство для регулирования натяжения полосы в башенной печи | 1983 |
|
SU1104176A1 |
Изобретение относитс1Я к контрольным н регулирующим устройствам прокатных станов, реагирукндим на измерение натяжения прокатываемого материала, и может быть использовано в системах автоматического регулирования натяжения полосы, например, на станах горячей прокатки.
Известно устройство для регулирования натяжения полосы на прокатном стане с петледержателем, включающее измеритель рассогласования угла поворота петледержателя от заданного значения, соединенный с системой управления двигателями валков предыдущей клети, к измеритель отклонения момента нагрузки на валу петледержателя от заданного значегния, который также подключен к схеме управления двигателями вгшков предьадущей клети Ц.
Недостатком этого устройства является то, что при отработке возмущений петли, вызванных изменениям скоростей главных двигателей предыдущей или последующей клетей, быстродействие его недостаточно, ввиду инерционности механической части привода петледержателя.
f Наиболее близким к описываемому ,
йо технической сущности и дбстйгаёмому результату является устройство для регулирования привода петледержателя, содержащее задатчик скорости двигатели ;йб лёдёр ясателя, датчик
1г6ка двигателя петледержателя, регулятор тока двигателя пет лёдержателя, регуляторскорости главнсзго
0 привода клетн, блоки преобрг13ования функций, трехпозиционный регулятор для коррекции заданной величины скбростй, блок управления, регулятор петли, цифровой задатчик скорости
5 главного привода, интегратор, задатчик скорости привода петледержателя, датчик угла петледержателя.
При 3toM выход трехпо ицйонного
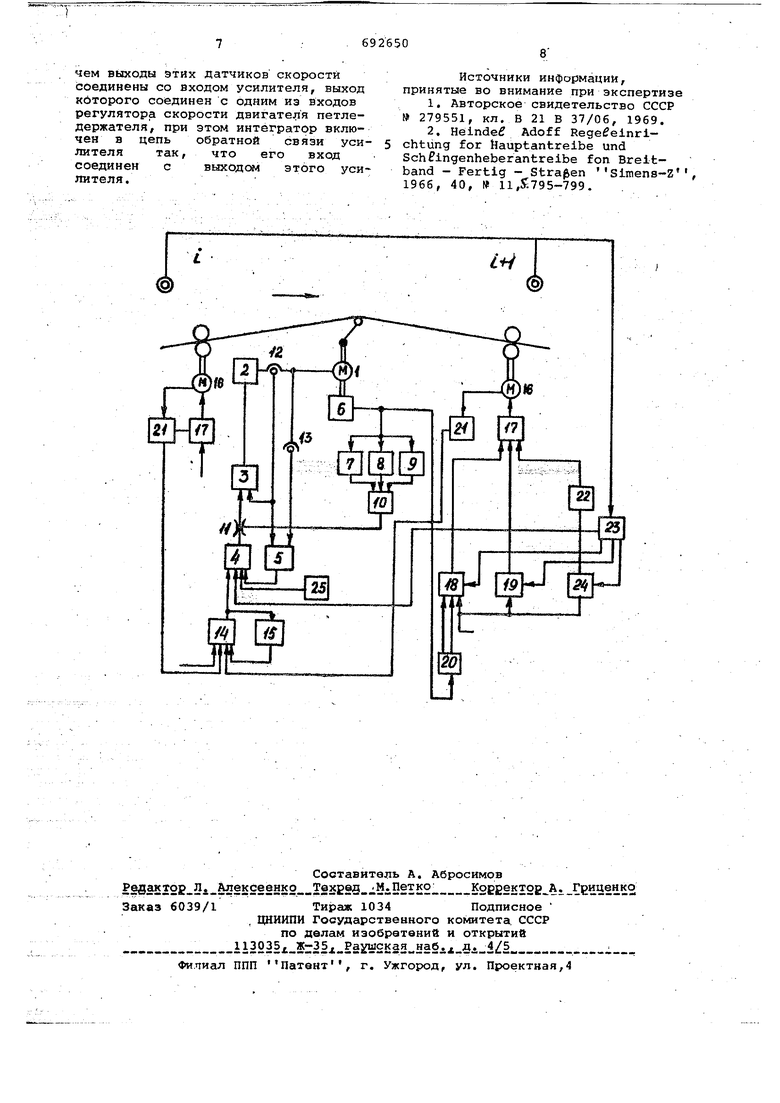
0 регулятора соединен со входом задатчик а скорости глгоаного привода, выходы блоков преобразования функции соединены с cyMMatopoM, а выход последнего соединен со входом задатчи5ка натяжения. Датчик гла петледержателя соединен через усилитель со входом регулятора скоростн главного привода. На вход блока управления подаются сигналы с датчиков наличия металла предьшуи1ей и последующей клети. Входы блока управления соединены со входами регулятора петли, интегратора скорости двигателя петледержателя. Регулирование положения петледер жателя осуществляется воздейст вием на регулятор скорости клети. Скорос клети корректируется по трем каналам от регулятора петли, интегратора, и тре5{познционного регулятора, воздействукяцего на регулятор С2сорос ти главных приводов. В регуляторе привода петледержа. теля обеспечивается независимость натяжения Полосы от угла его поворота, а момент двигателя определяет ся выражением, (еЛ,Т)М9ан где сЛ - угол подъема петледержа МвЬ- момент двигателя петледержателя, приведенный к валу рычага пётлёдержателя;статический момент на валу петледержатёля, В переходных режимах ошибка регулирования будет, в основном, определяться моментом инерции привода петледержатёля. Для уменьшения ошиб ки в регулировании стремятся уменьшить момент инерции привода петледержатёля, применяя приводы специал ной конструкции или заменяя на гидравлические или пневматические. Это устройство в KOHtype регулирования положения петледержатёля (контур регулирования петли), осуществляется по трем каналам: от реryiWTBgia петли, интегратора и трехпозйцйонного регулятора, воздействуйщего на задатчик скорости главного привода клети. При изменении скорости вращения валков одной из смежных клетей промежутка будет вне сено возмущение в контур регулирования натяжения полосы, т.е. величи на момента Mgij будет изменена ввиду того, что в регуляторе регшизует сй независимость етатйстнчёскбго мо мента от угла петледерж твля, а основную ошибку в систему будет вно сить динамическая составляющая момента двигателя. Увеличение быстродействия ограничено областью устойчивости системы регулирования и эйергетическими возможностями при вода петледержатёля. Недостатком устройства является нгипичие динамической ошибки при отработке возмущений йатяжения полосы в свою очередь, снижающей быстродей ствие устройства. Цель изобретения - повьаиеНйе точ ности и быстродействия регулирования натяжения полосы. Поставленная цель достигается тем, что в устройство, содержащее контур регулирования натяжения и контур регулирования положения петледержатёля, причем первый содержит йвигатель петледержатёля, вход которого соединен с датчиками тока, напряжения, угла петледержатёля и с выходом регулятора тока через управляемый выпрямитель, причем входы регулятора тока соединены соответственно с выходом регулятора скорости двигателя петледержатёля через задатчик натяжения и с выходом датчика тока, который, как и выход датчика напряжения, соединен со входом блока умножения, выход которого соединен со входом регулятора скорости двигателя петледержатёля, выход датчика угла петледержатёля соединен со входом сумматора через блоки функционального преобразователя, а контур регулирования положения петледержатёля содержит регулятор скорости главного привода клети, входы которого соединены соответственно с выходами регулятора петли и интегратора и через задатчик скорости с выходбм трехпозиционного регулятора, вход которого соединен с выходом блока, управления, другие выходы которого соединены соответственно со входами регулятора петли, интегратора и регулятора скорости двигателя петледержатёля, а вход рёгу- лятора гтетлй через второй функциональный преобразователь соединен с ыхо:цом датчика угла петледержатёля, введены цифровые датчики скорости лавных приводов смежных клетей стана, усилитель и второй интегратор, причем выходы этих датчиков скорости соединены со входом усилителя, выход которого соединен с одним из входов регулятора скорости двигателя петледержатёля, при этом второй интегратор вклшчен в цепь обратной связи усилителя так, что его вход соединен с выходом данного усилителя. функциональная схема устройства автоматического регулирования натяжения полосы на прокатном стане изображена на чертеже Устройство состоит«из контура регулирования натяжения, содержащего двигатель 1 петледержатёля, управляемого выпрямителя 2, регулятора 3 тока двигателя петледержатёля, регулятора 4 скорости двигателя пет.ледержателя,блока 5 умножения, датчика 6 угла поворота петледержатёля, блоков 7, 8, 9 -функционального преобразователя, сумматора 10, задатчика 11 натяжения, датчика 12 тока двигателя петледержатёля, датчика 13 напряжения двигателя петледержателя, усилителя 14 и интегратора 15
Устройство также содержит контур регулирования положения петледержа.теля, который состоит из главного привода 16 клети, регулятора 17 скорости главного привода, регулятора 18 петли, интегратора 19, второго функционального преобразователя 20, цифрового датчика 21 скорости главного привода, задатчика 2 скорости главного привода, блока 23 управления, трехпозиционного реГуля,тора 24, и кроме этого содержит за.датчик 25 скорости двигателя петледержателя.
Устройство работает следующим образом.
Полоса в процессе прокатки, возцействуя на ролик петледержателя, Т1зменяет момент двигателя 1 петледержателя. Действительная величина тока якоря двигателя пётледер1жателя замеряется при noMooQi датчик 12 тока, задатчиком 11 задают величину тока якоря двигателя 1, причем посредством блоков 7, 8,9 фуикционашьного преобразователя обеспечивают компенсацию соответственно вес петледержателя, веса полосы и задание величины натяжения в зависимости ,от величины угла положения петледёр жателя. Сумматор 10 определяет зону токоограничеиия задатчика 11. Сигнал ;с регулятора скорости 4 поступает на вход регулятора тока 3. При определении заданной скорости вращения имеются ввиду два режима работы подъем на определенный угол при заданном натяжении проката и возвращение петледержателя в исходное положение с предварительным подто|Ж аяойванием для предотвращения удара об упор. Регулятор петли 18 обеспечивает поддержание згщанного угла положения петледержаталя путем изменения скорости главного привода .последующей клети,Скорости валков смежных клетей ашгебраически вычитаются на входе усилителя 14, а величина отклонения после усиления и интегрирования подается на вход этого же усилителя, Тэ.ким образом, на вход регулятора 4 скорости привода петледержателя будет введен сигнал, соответствующий производной от разности .скоростей валков смежных клетей, что эквивалентно введению в канал регулирования второй производной от натяжения полосы, согласно зависимости
Т KS(Vj.i - Vi)dt, где Т - натяжение полосы;
К - коэффициент пропорциональности; - скорости валков i-ой
и {1+1)-ой клетей, Регулятор скорости 4, воэпействуя на ретулятор тока 3, изменит момент
двигателя 1 петледержателя, скомпен-;, сирует динамическую составляющую момента двигателя петледержателя MjttH, что уменьшит. динамическую ошибку системы и повысит ее быстродействие и точность регулирования.
Работой регуляторов 4 скорости и 18 петли, интегратора 19 и трехпозиционного регулятора 24 управляет блок 23, .
Введение в регулятор скорости двигателя петледержателя сигнала, соответствукнцего производной относительной разности скоростей смежных клетей, увеличивает быстродействие регулятора натяжения и регулирования,
снижает динамическую ошибку в 1,52 раза за счет упреждающего изменения момента на валу петледержателя.
20
Формула изобретения
Устройство для автоматического регулирования натяжения полосы, содержащее контур регулирования натяжения и контур регулирования положения петледержателя, прич.ем первый содержит двигатель петледержателя, вход которого соединен с датчиками тока, напряжения, угла петле0 Держателя и с выходом регулятора тока через управляемый выпрямитель, причем входы регулятора тока соединены соответственно с выходом регулятора скорости Двигателя петлвдер5 |жателя через згщатчик натяжения и с выходом датчика тока, который, как и выход датчика напряжения, соединен со входом блока умножения, .выход которого соединен со входом (Регулятора скорости двигателя пет0ледержателя, выход датчика угла петледержателя соединен со входом сумматора через блоки функционального преобразователя, а контур регулирования положения петледержате ,ля содержит регулятор скорости главного привода клети, входы которого соединены соответственно с выходами регулятора петли и интегратора и через задатч:ик скорости с выходом
0 трехпозиционного регулятора, вход которого соединен с выходом блока управления, другие выходы которого соединены соответственно со входс1ми регулятора петли, интегратора и регулятора скорости двигателя петледержателя, а вход регулятора петли через второй функциональный преобразователь соединен с выходом датчи- ка угла петледержателя, о т л ичающееся тем, что, с целью повышения точности и быстродействия регулирования, в него дополнительно .введены цифровые датчики скорости главных приводов смежных клетей
с стана, усилитель и интегратор, причем выходы этих датчиков скорости йоединены со входом усилителя, выход кбторого соединен с одним из входов регулятора скорости двигателя петледержателя, при этом интегратор включен в цепь обратной связи усилителя так, что его вход соединен с выходсм этого усилителя.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР 279551, кл. В 21 В 37/06, 1969.
