1
Изобретение относится к системам автоматического управления.
Наиболее близким к изобретению по технической сущности является привод, содержащнй последовательно соединенные двигатель постоянного тока, редуктор, датчик шагов и датчик рассогласования I. Он характеризуется сложностью н малым быстродействием.
Цель изобретения заключается в упрощении схемы и повышении быстродействия. В описываемом приводе это достигается тем, что он содержит блок анализа и переключения режимов движения, генератор низкой частоты н ждущий генератор импульсов, выход блока анализа и переключения режимов движения соединен с входом двигателя посте янного тока, первый вход - с выходом датчика рассогласования, второй вход - с выходбм генератора низкой частоты, а третий - с выходом ждущего генератора импульсов, вход которого связан с выходом датчика шагов.
На фнг. 1 приведена блок-схема описываемого электропривода; на фиг. 2 - циклограмма.
Привод состоит из датчика I рассогласовання, генератора 2 низкой частоты, блока 3 анализа н переключения режимов движения.
ждущего генератора 4 импульсов, двигателя 5 постоянного тока, редуктора 6 и датчика 7 шагов.
Расстояние до требуемой позиции задается знакопеременной величиной ©п, измеряемой числом шагов датчика 7. Датчик I рассогласования в зависимости от направления вращения двигателя 5 суммирует или вычитает импульсы, поступающие с датчика 7. Полученное таким образом текущее рассогласование Дв; поступает на блок 3 анализа н переключения режимов движения. Если ив; по абсолютной величине больше некоторого порога А0п, то на двигатель 5 поступает максимальное постоянное напряжение, по полярности совпадающее со знаком величины AQj, что вызывает наискорейшнй разгон и вращение двигателя.
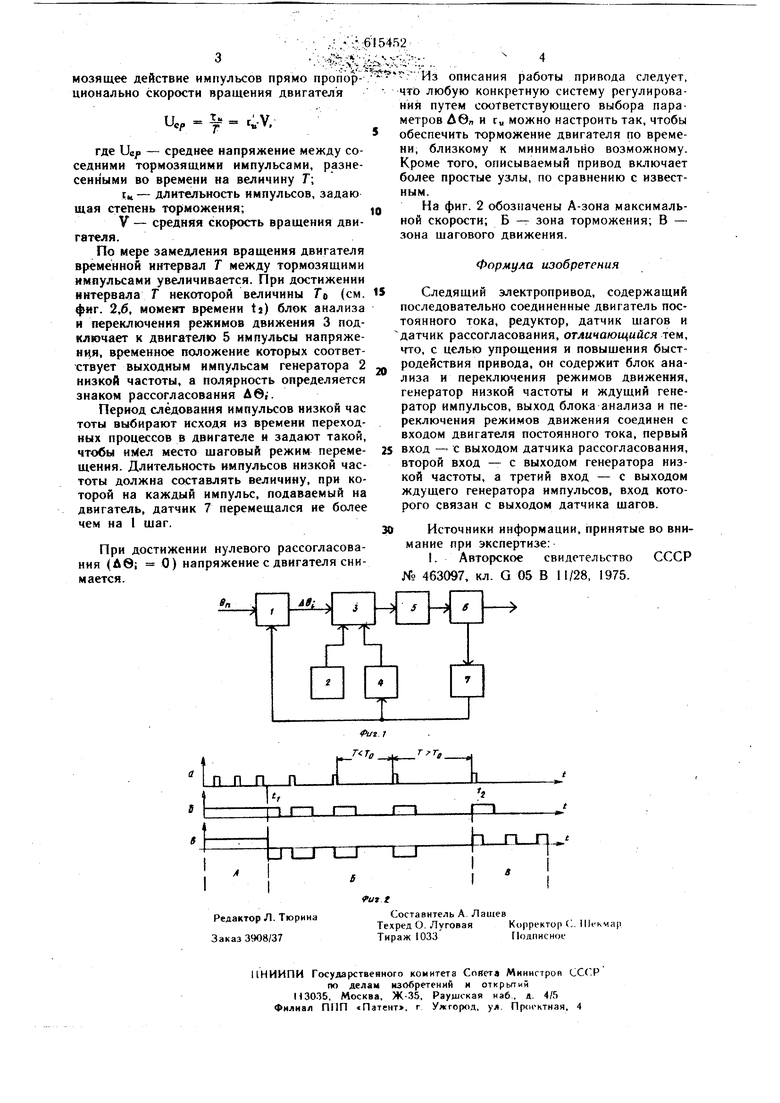
На фиг. 2а показаны импульсы датчика шагов 7, а на фиг. 2в - входной сигнал двигателя. При достижении рассогласования фиксированной величины &&i (см. фиг. 26, момент времени ti) на двигатель подаются тормозящие импульсы, период следования и длительность которых определяются выходными импульсами ждущего генератора 4. Последний синхронизируется импульсами датчика шагов 7. Нетрудно видеть, что тормозящее действие импульсов прямо nporiopцнонально скорости вращения двигателя
1л Т
Ц
V.
ер
где - среднее напряжение между соседними тормозящими импульсами, разнесенными во времени на величину Г;
Гц - длительность импульсов, задаю щая степень тopiмoжeния;
V - средняя скорость вращения двигателя.
По мере замедления вращения двигателя временной интервал Г между тормозящими импульсами увеличивается. При достижении интервала Г некоторой величины Го (см. фиг. 2,6, момент времени tj) блок анализа и переключения режимов движения 3 подключает к двигателю 5 импульсы напряжения, временное положение которых соответствует выходным импульсам генератора 2 низкой частоты, а полярность определяется знаком рассогласования Ав;.
Период следования импульсов низкой час тоты выбирают исходя из времени переходных процессов в двигателе и задают такой, имел место шаговый режим перемещения. Длительность импульсов низкой частоты должна составлять величину, при которой на каждый импульс, подаваемый на двигатель, датчик 7 перемещался не более чем на I щаг.
При достижении нулевого рассогласования (Ав; 0) напряжение с двигателя снимается.
Из описания работы привода следует, что любую конкретную систему регулирования путем соответствующего выбора параметров Д0П и Гц можно настроить так, чтобы обеспечить торможение двигателя по времени, близкому к минимально возможному. Кроме того, описываемый привод включает более простые узлы, по сравнению с известным.
На фиг. 2 обозначены А-зона максимальной скорости; Б - зона торможения; В - зона щагового движения.
Формула изобретения
Следящий электропривод, содержащий последовательно соединенные двигатель постоянного тока, редуктор, датчик щагов и датчик рассогласования, отличающийся тем, что, с целью упрощения и повыщення быстродействия привода, он содержит блок анализа и переключения режимов движения, генератор низкой частоты и ждущий генератор импульсов, выход блока анализа и переключения режимов движения соединен с входом двигателя постоянного тока, первый вход - с выходом датчика рассогласования, второй вход - с выходом генератора низкой частоты, а третий вход - с выходом ждущего генератора импульсов, вход которого связан с выходом датчика щагов.
Источники информации, принятые во внимание при экспертизе:
I. Авторское свидетельство СССР № 463097, кл. G 05 В 11/28, 1975.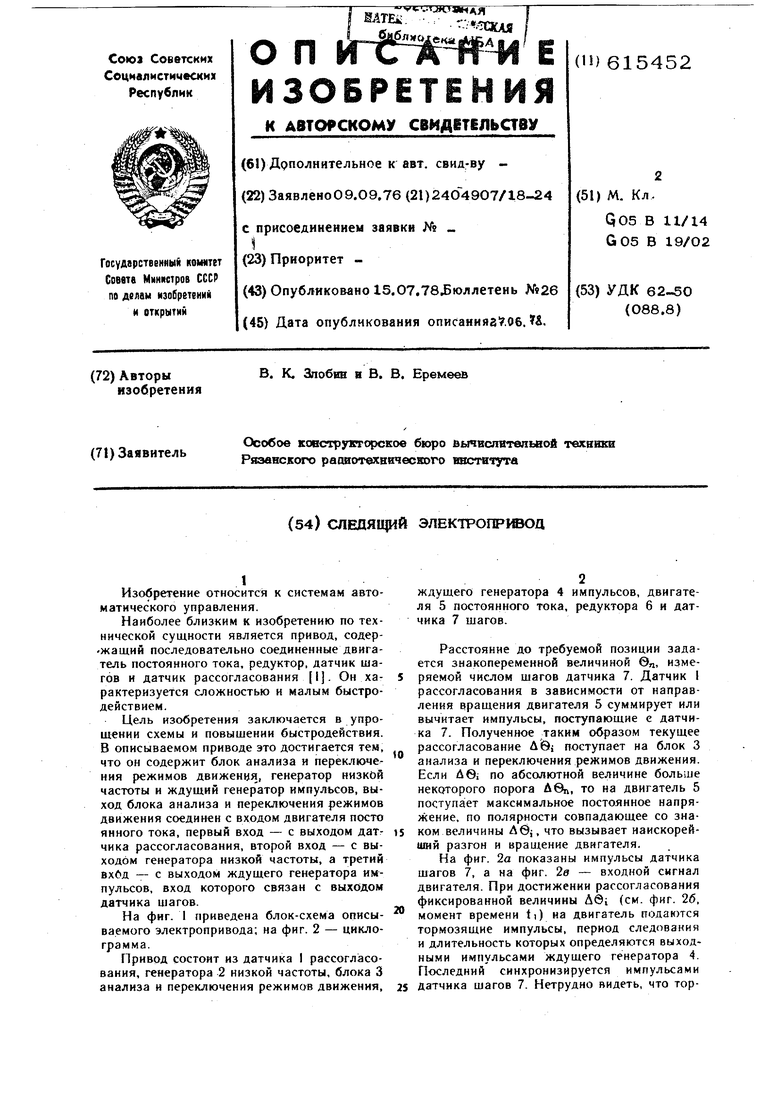
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод | 1979 |
|
SU809057A2 |
| Следящий электропривод | 1985 |
|
SU1259207A2 |
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Устройство для управления реверсивным электродвигателем постоянного тока с электромагнитным тормозом | 1981 |
|
SU1053246A1 |
| Следящая система | 1975 |
|
SU547726A1 |
| Способ управления при испытаниях агрегатом взаимной нагрузки и устройство для его осуществления | 1988 |
|
SU1605296A1 |
| Серводин | 1986 |
|
SU1667000A1 |
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ТЯГОВОЙ ПЕРЕДАЧИ МАНЕВРОВОГО ТЕПЛОВОЗА | 2010 |
|
RU2443580C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 2001 |
|
RU2210799C2 |
