1
Изобретение относится к автоматическому управлению, а именно к автоматическим импульсным регуляторам, в которых выходной сигнал является прерывной функцией отклонения входного сигнала от заданной величины, и может быть применено в системах автоматического управления различными объектами при использовании в качестве исполнительных устройств электрических исполнительных механизмов постоянной скорости, в том числе имеющих люфты в кинематических передачах.
Целью изобретения является повышение надежности регулятора путем упрощения конструкции.
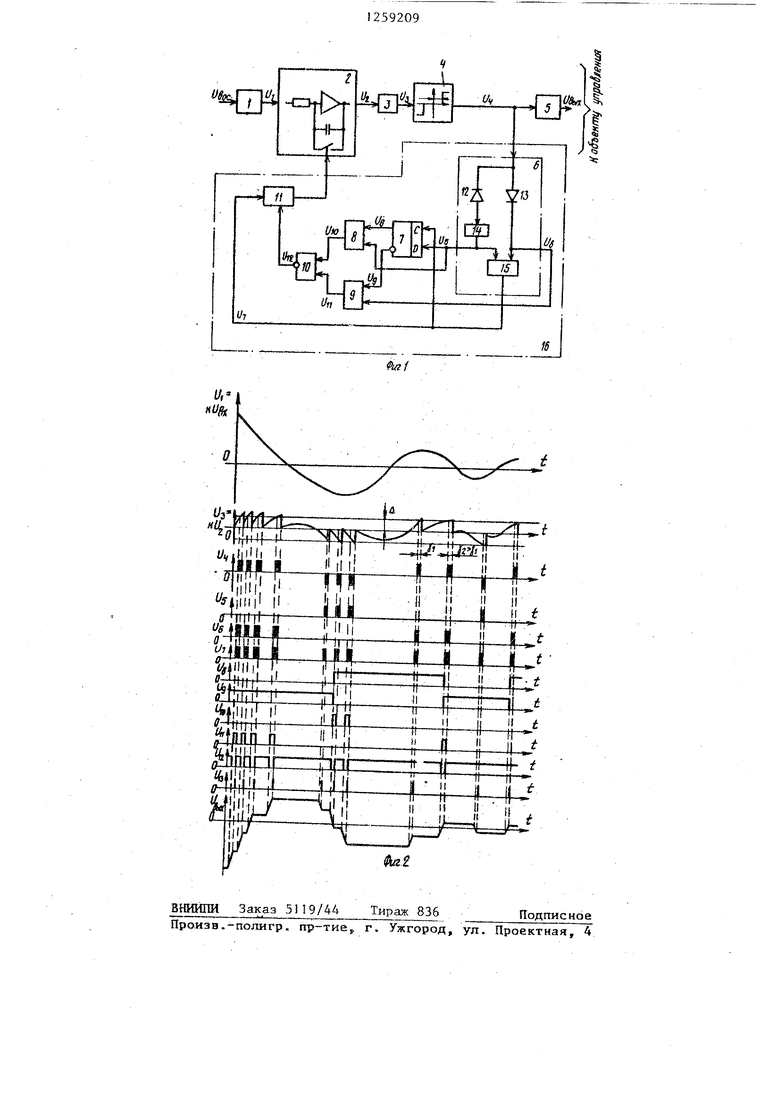
На фиг. I приведена функциональная схема регулятсУра; на фиг, 2 - эпюры напряжений блоков регулятора при отработке управляющего воздействия.
Регулятор содержит усилитель 1 напряжения, интегратор 2, усилитель 3 мощности, трехпозиционный релейный блок 4, исполнительньв механизм 3, пороговый элемент 6, D-триггер 7 первый . 8 и второй 9 элементы И, элемент ИЛИ 10 и элемент 11 задержки. Пороговый элемент содержит первый 12 и второй 13 де1екторы, инверт.ор 1А и элемент ИЛИ 15.
В состав реле 16 времени входят пороговый элемент 6, триггер 7, элементы И 8 и 9 элемент ИЛИ 0 и элемент 11 задержки.
Регулятор работает следующим образом.
На вход усилителя 1 напряжения поступает сигнал, равный разности между заданным и действительным значениями регулируемого параметра. С выхода предварительного усилителя I напряжения сигнал U, KU, поступает на вход интегратора 2.Сигнал и, интегрируется интегратором 2 и при достижении сигналом U, на выходе усилителя 3 мощности величины, превышающей зону нечувствительности трехпозиционного релейного блока 4, происходит срабатывание последнего.
Сигнал и, поступает на вход ис- полнительного механизма 5 системы автоматического регулирования и на йход порогового элемента 6 реле 16 времени Происходит срабатывание по
39209J
рогового элемента 6. В случае, если сигнал рассогласования больше нуля, а усилитель 1 и интегратор 2 осуществляют инвертирование входных сигна5 лов при срабатывании релейного блока 4, на его выходе возникает сигнал и4 положитель}юй полярности. Ь этом случае сигнал проходит через детектор 13 на первый вход злемен та ИЛИ 15 и в виде сигнала Ug на первый вход элемента И 9. С вьгхода элемента ИЛИ 13 сигнал поступает на тактовый вход с D-триггера 7 и на информационный вход элемента 11 задержки.
5 Будем рассматривать работу регулятора с момента времени, когда на его выходе сформирован по крайней мере второй положительный импульс управления. Поскольку переключение D-тригге20 ра происходит с задержкой на один такт, то в этом случае триггер 7 находится в положении, при котором на его прямом выходе сигнал Ug отсутствует, а на инверсном присутствует
сигнал и, . При возникновении импульса управления положительной полярности U4 на выкоде элемента И 9 возникает сигнал Ufl, поступаюпшй на первый вход элемента ИЛИ 10. При этом сни30 мается сигнал U, с его выхода и, соответственно, с управляющего входа элемента I1 задержки. Схема элемента 11 задержки в приведенном примере строится таким образом, что при от35 сутствии управляющего воздействия на его управляющем входе происходит увеличение задержки времени, а в противоположном - уменьшение.
Таким образом при сохранении положительного значения сигнала рассогласования Ujj на входе регулятора на его выходе формируется частотно-модулированная последовательность импульсов управления U , поступающих на исполнительный механизм. В момент изменения знака рассогласования происходит изменение знака сиг- надд на выходе интегратора 2 и при достижении сигналом U порога срабатывания релейного блока 4 происходит срабатывание последнего при формировании на выходе релейного блока 4 сигнала отрицательной полярности. При этом сигнал U поступает через детектор 12 и инвертор 14 на второй вход элемента ИЛИ 15 и на D-вход D-триггера 7. При первом после изменения полярности импульсе уп
равления переключения D-триггера 7 не происходит. На выходе элементов И 8 и 9 сигналы при этом отсутствуют и имеется сигнал. U, на выходе элемента ИЛИ 10. Таким образом, первый после изменения полярности рассогласования импульс управления оказывается уменьшенной величины. При втором отрицательном импульсе управления на выходе регулятора происходит переключение D-триггера 7 и возникновение сигнала U, на выходе элемента И 8, так как на оба входа последнего приходят сигналы U и Ug.
В дальнейшем процесс повторяется до тех пор, пока в системе не возникает устойчивый автоколебательный ре ,жим работы с числом импульсов на полупериоде, равным 1. Амплитуда автоколебаний на выходе объекта при этом будет определяться реакцией объекта управления на первый после изменения полярности рассогласования импульс управления, т.е. будет иметь значительно меньшую величину, чем при не- изменной длительности импульсов управления.
Рассмотренный процесс регулирования отображен на фиг.2, где помимо эпюр изменения сигналов блоков собственно регулятора приведена эпюра изменения сигнала выходе исполнительного механизма системы автоматического управления.
В случае, если исполнительный механизм системы имеет люфты в кинематической передаче, длительность первого импульса после изменения полярности сигнала рассогласования может быть принята большей, чем последующие, так как выборка люфта происходит при каждом изменении направления
перемещения исполнительного механима, что определяется изменением полярности управлякяцих импульсов. В этом случае для наиболее простого решения может быть осуществлена подача сигнала и, на управляющий вхо элемента 1I задержки не с инверсного, а с прямого выхода элемента ИЛИ 10.
Формула изобретени
Импульсный регулятор,содержавши последовательно соединенные усилитель напряжения, интегратор, усилитель мощности, трехпозиционный релейный блок и исполнительный механизм, пороговый элемент, подключенный входом к выходу трехпозиционно- го релейного блока, первый и второй элементы И, элемент ИЛИ и элемент задержки, соединенный выходом с управляющим входом интегратора, отличающийся тем, что, с целью повышения надежности путем упрощения конструкции регулятора, в него введен D-триггер, причем первый выход порогового элемента подключен к D-входу D-триггера и к . первому входу первого элемента И,втрой выход - к первому входу второго элемента И, а третий выход к С-вхо- ду D-триггера и к информационному входу элемента задержки, первый выход D-триггера подключен к второму входу первого элемента И, а второй выход - к второму входу второго элемента И, выходы первого и второго элементов И подключены соответственно к первому и второму входам элемента ИЛИ, а выход элемента 11ПИ подключен к управляющему входу эле- мента задержки.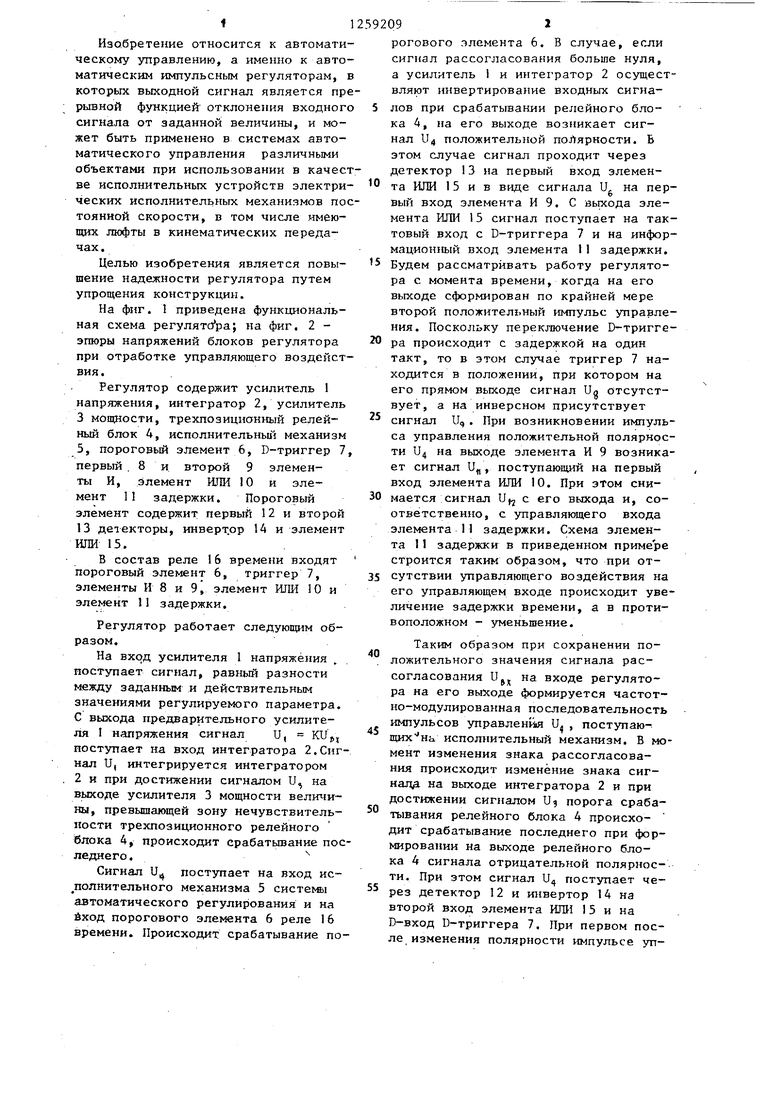

| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный регулятор | 1982 |
|
SU1101787A1 |
| Импульсный регулятор | 1983 |
|
SU1117585A1 |
| Устройство для регулирования технологических параметров по заданной программе | 1983 |
|
SU1136121A1 |
| Импульсный регулятор | 1972 |
|
SU457070A1 |
| Импульсный регулятор | 1978 |
|
SU744437A1 |
| Устройство для автоматическогоупРАВлЕНия Об'ЕКТАМи C TPAHC-пОРТНыМ зАпАздыВАНиЕМ | 1979 |
|
SU796789A2 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| Трехпозиционный регулятор | 1984 |
|
SU1259208A1 |
| Импульсный регулятор | 1982 |
|
SU1105859A1 |
| Импульсный регулятор | 1979 |
|
SU991369A2 |
Изобретение относится к области автоматического управления и может быть применено при использовании исполнительньрс устройств, имеющих люфты в кинематических передачах. Цель изобретения - повышение надежности регулятора. Регулятор содержит усилитель напряжения, интегратор, усилитель мощности, трехпозиционный релейный блок и реле времени, причем реле времени содержит D-триггер.Схема реле времени позволяет, избежать неправильной работы регулятора при определенных параметрах элементов. 2 ил. (Л С
| Кунцевич В.М., Чеховой Ю.Н | |||
| Нелинейные системы управления с частотно- и широтно-импульсной модуляцией | |||
| Киев.: Техника, 1970, с.42-45 | |||
| Импульсный регулятор | 1982 |
|
SU1101787A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
