Изобретение относится к электротехнике и может быть использовано для управления тиристорными электроприводами постоянного тока.
Известно устройство цифрового регулирования скорости электродвигателя синхронно с напряжением питания, включающее цифровое вычислительное устройство, реверсивный тиристорный преобразователь, распределитель включающих импульсов тиристоров, двигатель постоянного тока, трансформатор тока, генератор импульсов, устройство управления.
Однако известное устройство обеспечивает стабилизацию скорости в установившемся режиме и не обеспечивает заданных режимов работы при разгоне и замедлении привода, а также не устраняется запаздывание тиристорного преобразователя, обусловленные неполной управляемостью преобразователя, что заметно ухудшает показатели регулирования.
Наиболее близким к изобретению является устройство цифрового управления ти- ристорным электроприводом постоянного тока, включающее двигатель постоянного тока, тиристорный преобразователь с системой его управления, цифровое вычислительное устройство, аналоговые датчики тока и скорости двигателя, два аналого-цифровых преобразователя, цифроаналоговый преобразователь, функционированный преобразователь, три компаратора, три триггера, согласующий и разделительный трансформатор.
Недостатком данного устройства является то, что наличие функционального преобразователя снижает точность сигнала управления тиристорными преобразователями, использование аналоговой системы импульсно-фазового управления тиристорами существенно усложняет схемы тиристорного преобразователя и снижает точность управления. Использование аналогового датчика скорости снижает точность измерения скорости по сравнению с цифровыми измерителями скорости.
Цель изобретения - повышение точности управления электроприводом постоянного тока.
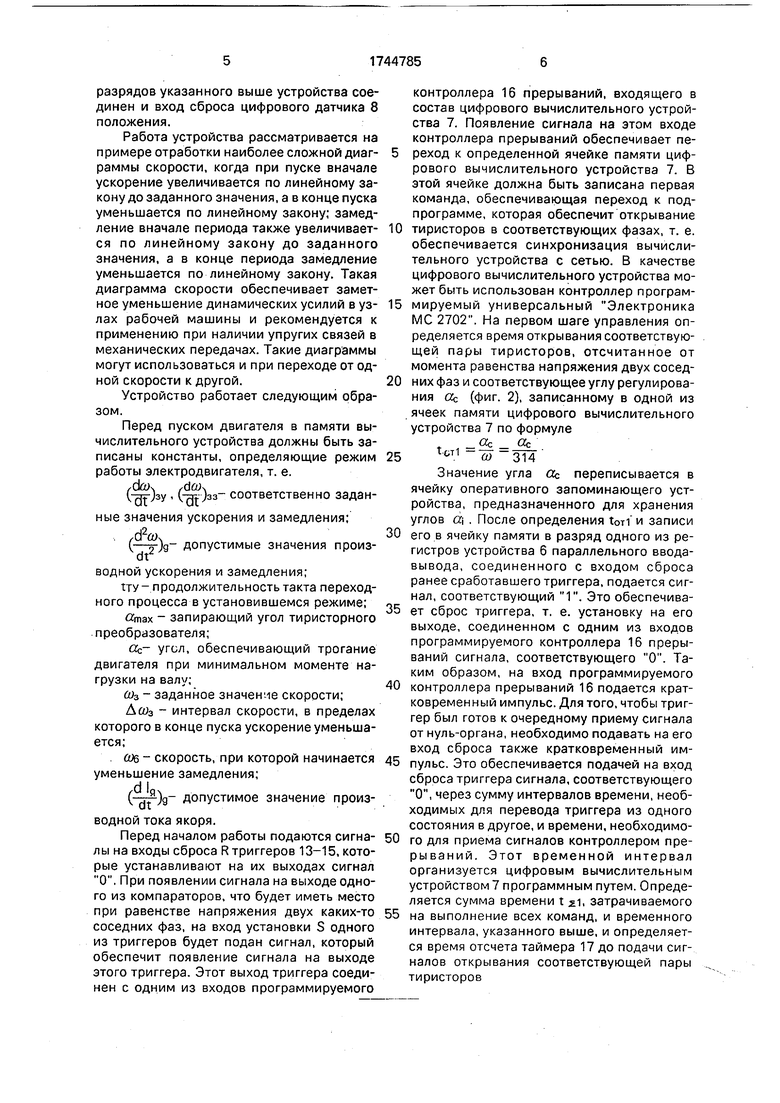
На фиг. 1 изображена функциональная схема устройства; на фиг. 2 - временные диаграммы работы тиристорного преобразователя; фиг. 3 - алгоритм вычислительного устройства.
Устройство содержит силовую часть тиристорного преобразователя 1, включенную на сеть трехфазного тока, на выход которого включен якорь двигателя 2 постоянного тока, обмотку 3 возбуждения двигателя, включенную на сеть постоянного тока, аналоговый датчик 4 тока, включенный на шунт в цепи якоря, аналого-цифровой преобразователь 5, вход которого соединен с
выходом аналогового датчика 4 тока, а выход - с одним из регистров устройства 6 параллельно ввода-вывода цифрового вычислительного устройства 7, цифровой датчик 8 положения, соединенный с валом
двигателя, выход которого соединен с одним из регистров устройства 6 параллельноговвода-выводацифровоговычислительного устройства 7, согласующий и разделительный трансформатор 9,
включенный первичной обмоткой на ту же сеть трехфазного тока, на которую включена силовая часть тиристорного преобразователя 1, три компаратора 10-12, зажимы которых соединены с соседними фазными
обмотками трансформатора 9, выходы каждого компаратора соединены с входами установки трех триггеров 13-15, входы сброса которых соединены с разрядами одного из регистров устройства 6 параллельного ввода-вывода цифрового вычислительного устройства 7, выходы триггеров соединены с отдельными входами программного контрол лера 16 прерываний цифрового вычислительного устройства 7, другие три входа
программируемого контроллера 16 прерываний соединены с выходами таймера 17 цифрового вычислительного устройства 7, шесть формирователей 18-23 импульсов, выходы которых соединены с управляющими электродами тиристоров аналоговой части тиристорного преобразователя 1, а входы каждого соединены с отдельными разрядами одного из регистров устройства 6 параллельного ввода-вывода цифрового
вычислительного устройства 7, с одним из
разрядов указанного выше устройства соединен и вход сброса цифрового датчика 8 положения.
Работа устройства рассматривается на примере отработки наиболее сложной диаграммы скорости, когда при пуске вначале ускорение увеличивается по линейному закону до заданного значения, а в конце пуска уменьшается по линейному закону; замедление вначале периода также увеличивается по линейному закону до заданного значения, а в конце периода замедление уменьшается по линейному закону. Такая диаграмма скорости обеспечивает заметное уменьшение динамических усилий в узлах рабочей машины и рекомендуется к применению при наличии упругих связей в механических передачах. Такие диаграммы могут использоваться и при переходе от одной скорости к другой.
Устройство работает следующим образом.
Перед пуском двигателя в памяти вычислительного устройства должны быть записаны константы, определяющие режим работы электродвигателя, т. е.
(-ртр)зу , (-рк.-)зз соответственно заданные значения ускорения и замедления;
/d2UK
(-;r-)g- допустимые значения произdrводной ускорения и замедления;
try продолжительность такта переходного процесса в установившемся режиме;
остах запирающий угол тиристорного преобразователя;
Ос- угол, обеспечивающий трогание двигателя при минимальном моменте нагрузки на валу;
й)3 - заданное значение скорости;
- интервал скорости, в пределах которого в конце пуска ускорение уменьшается;
. сое - скорость, при которой начинается уменьшение замедления;
(-р-)д- допустимое значение производной тока якоря.
Перед началом работы подаются сигналы на входы сброса R триггеров 13-15, которые устанавливают на их выходах сигнал О, При появлении сигнала на выходе одного из компараторов, что будет иметь место при равенстве напряжения двух каких-то соседних фаз, на вход установки S одного из триггеров будет подан сигнал, который обеспечит появление сигнала на выходе этого триггера. Этот выход триггера соединен с одним из входов программируемого
контроллера 16 прерываний, входящего в состав цифрового вычислительного устройства 7. Появление сигнала на этом входе контроллера прерываний обеспечивает переход к определенной ячейке памяти цифрового вычислительного устройства 7. В этой ячейке должна быть записана первая команда, обеспечивающая переход к подпрограмме, которая обеспечит открывание
тиристоров в соответствующих фазах, т. е. обеспечивается синхронизация вычислительного устройства с сетью. В качестве цифрового вычислительного устройства может быть использован контроллер программируемый универсальный Электроника МС 2702. На первом шаге управления определяется время открывания соответствующей пары тиристоров, отсчитанное от момента равенства напряжения двух соседних фаз и соответствующее углу регулирования Ос (фиг. 2), записанному в одной из ячеек памяти цифрового вычислительного устройства 7 по формуле «с «с
ст1 О) 314
Значение угла % переписывается в ячейку оперативного запоминающего устройства, предназначенного для хранения углов d . После определения tori и записи
его в ячейку памяти в разряд одного из регистров устройства 6 параллельного ввода- вывода, соединенного с входом сброса ранее сработавшего триггера, подается сигнал, соответствующий 1. Это обеспечивает сброс триггера, т. е. установку на его выходе, соединенном с одним из входов программируемого контроллера 16 прерываний сигнала, соответствующего О. Таким образом, на вход программируемого
контроллера прерываний 16 подается кратковременный импульс. Для того, чтобы триггер был готов к очередному приему сигнала от нуль-органа, необходимо подавать на его вход сброса также кратковременный импульс. Это обеспечивается подачей на вход сброса триггера сигнала, соответствующего О, через сумму интервалов времени, необходимых для перевода триггера из одного состояния в другое, и времени, необходимого для приема сигналов контроллером прерываний. Этот временной интервал организуется цифровым вычислительным устройством 7 программным путем. Определяется сумма времени t л1. затрачиваемого
на выполнение всех команд, и временного интервала, указанного выше, и определяется время отсчета таймера 17 до подачи сигналов открывания соответствующей пары тиристоров
t01 toTl-t 2.1-tyr,
где tyT - время, затраченное на команды управления таймера 17. Определяется число отсчетов таймера 17 по формуле
to1
Пот1 - tir
где trr - продолжительность такта генератора тактовых импульсов цифрового вычислительного устройства.
Число п0т1 программным путем записывается в один из каналов таймера и он начинает отсчет времени toi. По истечении времени отсчета на выходе этого канала таймера появляется сигнал, соответствующий 1. Этот выход соединен с одним из входов программируемого контроллера 16 прерываний. Обращение к одному из входов программируемого контроллера 16 прерываний обеспечит обращение к определенной ячейке памяти. В этой ячейке должно быть записано начало программы, которая обеспечит появление сигнала, соответствующего 1, в трех разрядах одного из регистров устройства параллельного ввода- вывода, которые соответственно соединены с входами двух формирователей импульсов, обеспечивающих открывание двух тиристоров, а также с входами сброса счетчика, входящего в состав цифрового датчика 8 положения. Сигналы на указанные выше входы должны подаваться кратковременно. В связи с этим через интервал времени, определяемый характеристиками формирователей импульсов и входом сброса счетчика, на указанные выше входы должен быть подан сигнал, соответствующий О. Это обеспечивается программным путем.
После подачи указанных выше первых импульсов на каждом интервале дискретности тиристорного преобразователя, т. е. на каждом такте переходного процесса, устройством 7 вычисляются среднее значение тока путем измерения его мгновенных значений через интервалы времени длительностью, определенной требуемой точностью определения среднего значения тока, причем измерение осуществляется в течение времени, равного trr Лт.Тр(фиг. 2), где A tip включает время, необходимое для выполнения расчетов при определении угла регулирования r/л + л для следующего такта
переходного процесса, и интервал времени, который обеспечивает изменение угла регулирования на следующем такте до открывания очередного тиристора при значении угла регулирования на предшествующем такте регулирования. На интервале trr Atrp определятся приращение угла поворота двигателя Л/} путем считывания содержи0
мого счетчика цифрового датчика 8 положения в конце интервала trr AtTp. Среднее значение скорости определяется по формуле
ад (tn - Atrp)
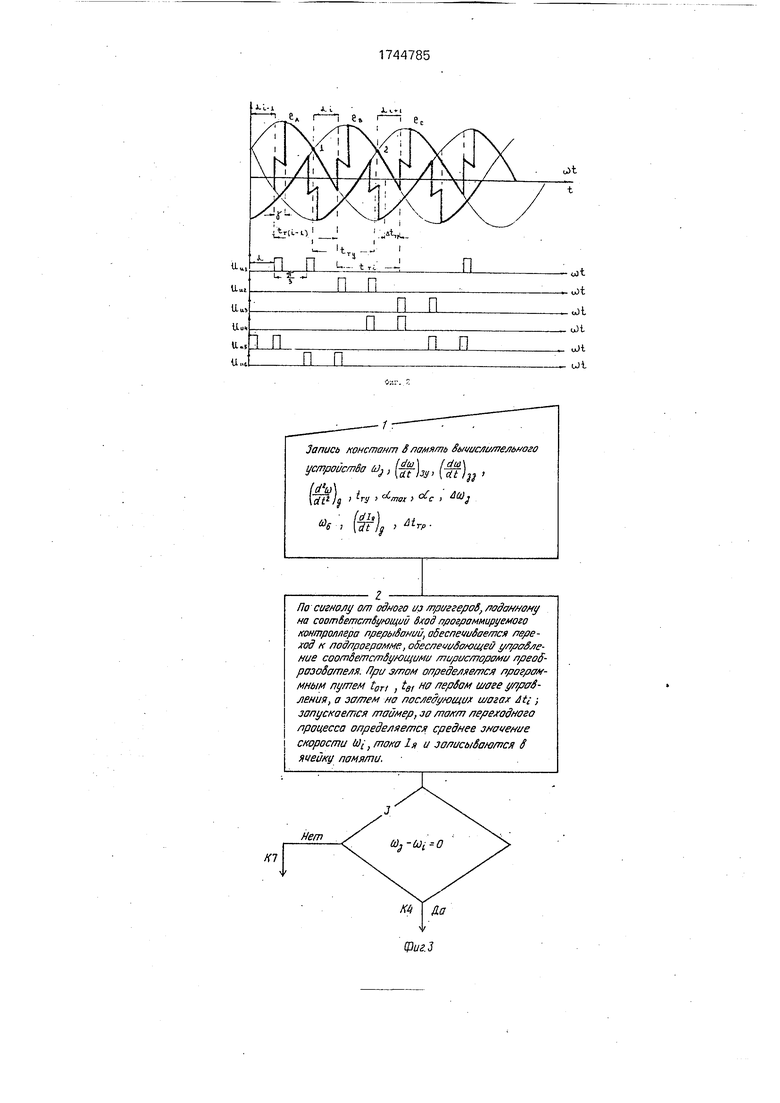
При расчетах гп принимается равным ТТУ (фиг. 2). После определения угла а ( + 1). которое рассмотрено ниже, определяется приращение угла регулирования A«i «(i+i) - а. Для подачи отпирающего импульса при угле регулирования Qf(j+1) необходимо после отсчета интервала вре- мени try- A tip отсчитать интервал, определяемый формулой
Ati AtTp+|g,
используя таймер.
r. В соответствии с особенностью работы трехфазных мостовых выпрямителей необходимо после подачи отпирающих импульсов, обеспечивающих заданный угол регулирования а, подавать через интервал
с/ Я/3
о времени глг/з тТ2Г отпирающие импульсы на соответствующую пару тиристоров (фиг. 2).
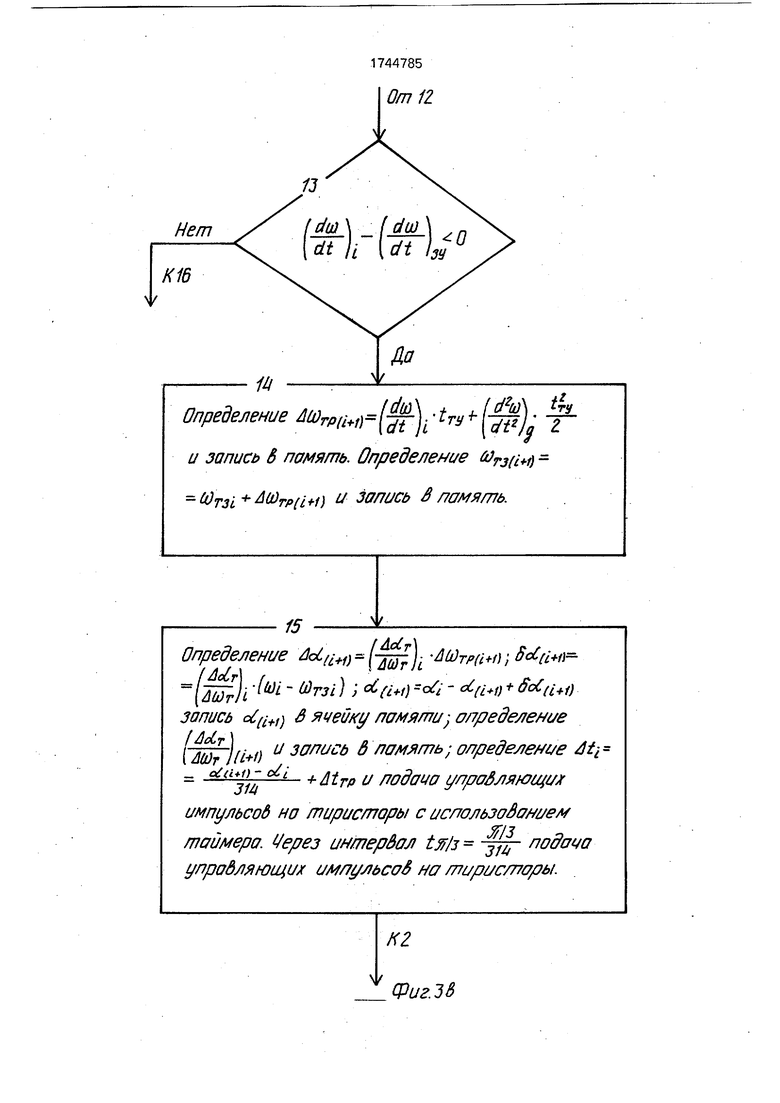
После определения среднего значения
Q скорости W, производится проверка выполнения условия ah - ah 0, где - заданное значение скорости. Если это условие выполняется, то проверяется условие . При выполнении этого условия на сле5 дующем такте переходного процесса определяются средние значения скорости и тока, а угол регулирования не изменяется. Если условие не выполняется, то отсчитывается интервал времени AtTp , что
0 обеспечивает угол регулирования «max. при котором тиристорный преобразователь закрыт.
Если условие ш3 - ОД 0 не выполняется, то проверяется условие - од 0 .
5 При выполнении этого условия, что свидетельствует о разгоне привода, проверяется условие ад 0. Если условие не выполняется, то необходимо обеспечить увеличение тока якоря двигателя до значения, превыша0 юш/го статический ток, путем постепенного уменьшения угла регулирования тиристорного преобразователя. Первое значение угла регулирования было принято на первом шаге равным «с , при котором обеспечива5 ется начало трогания двигателя при минимальном значении статического момента Мс на валу двигателя, т. е. при котором момент двигателя равен статическому моменту. На следующих тактах переходного процесса
угол регулирования определяется по формуле
a(i + -,) а -Датр,
А,А«тч AI
где Д«тр () А1ятр - расчетное изменеАЛ1ЯТ
ниеугла регулирования на следующем такте переходного процесса. Значение «(i+i) записывается в ячейку оперативного запоминающего устройства. Первоначальное значение расчетного коэф, Д«т ч,фициента ( .- ) может быть определено
заранее на основании расчета переходного процесса. Расчетное приращение тока на такте переходного процесса определяется по формуле
()g try Допустимое значение производной (. -тг)з
устанавливается исходя из условий коммутаций двигателя и обычно не превышает 25 номинальных значений тока в секунду. На каждом такте переходного процесса коэффициент ( Дат/Д1ят) определяется путем определения Д«т «(| + 1) -«i и l я( + 1) -1яь После определения ( Д«Т/Д 1ят) и подачи в систему управления тиристорным преобразователем нового значения угла регулирования «л + i) вновь начинается
определение средних значений тока и скорости на следующем такте переходного процесса. При определении расчетного приращения тока Д1ятр принимается про- должительнс сть такта пу, соответствующая постоянному углу регулирования. Такое допущение вполне обосновано, поскольку даже при максимальном значении производной тока, равном 25 номинальных значений в секунду, потребуется не менее 4 тактов переходного процесса для возрастания тока до номинального значения. Приращение угла регулирования и , при котором ток будет достигать номинального значения, будет порядка нескольких градусов. Следовательно, приращение угла регулирования на каждом такте будет не более 1-2°, а одному такту при постоянном значении соответствует угол, равный 120°.
Если условия 0)3 - ад 0 и о 0 вы- полняются.то проверяется выполнение условия (Оз. - ы ,где - интервал скорости, в пределах которого в конце пуска ускорение уменьшается с целью обеспечения желаемого характера переходного процесса в конце разгона двигателя. Значение AuJa может подбираться экспериментально в
0
5
0
5
0
5
процессе наладки привода исходя из заданного характера переходного процесса, Увеличение Додз будет обеспечивать более плавное изменение скорости в конце разгона, но будет затягивать время разгона. Уменьшение Дшз может приводить к заметному колебанию скорости в конце разго- на, но обеспечивает более быстрое достижение заданной скорости Aw3 .
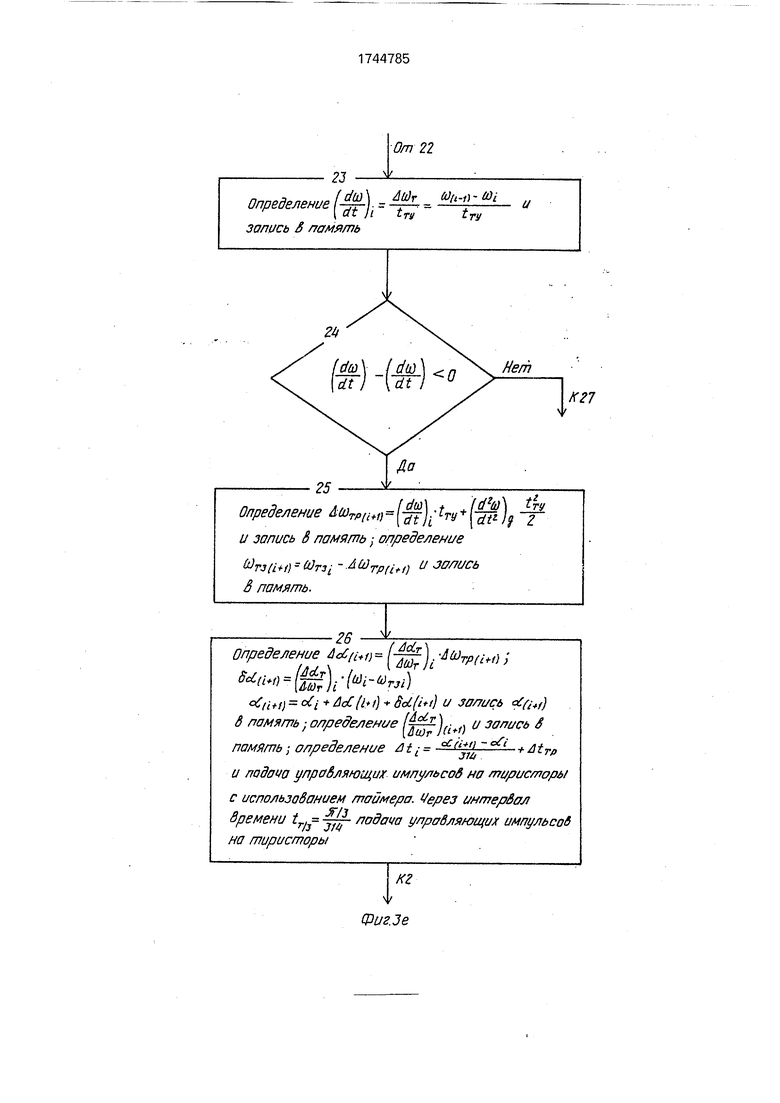
Если условие Ш3 - ojj Додз не выполняется, то определяется фактическое значение среднего ускорения на текущем такте по формуле
,сЦ Aft/r ft e(i -1)
W
где ад- средняя скорость на текущем такте переходного процесса;
rw(i-i)- средняя скорость на предшествующем такте переходного процесса.
Продолжительность такта переходного процесса при разгоне tin будет несколько изменяться при изменении угла регулирования а , но это изменение будет незначительным, поскольку изменение угла регулирования Дог на каждом такте переходного процесса будет величиной достаточно малой по сравнению со сдвигом по фазе между соседними фазами питающего напряжения, равным 120°. Поэтому, можно
принять . После определения (-pnr)i
проверяется условие , ,dwv n
(
и если выполняется, то расчетное приращение скорости на следующем такте определяется по формуле
40
A«Tp(i + 1)()rtTy-b(d2fttfb
Определяется тз(( +,) +AwTp(j + 1) и записывается в память. Определяются
л«Ч + 1)(д1й Лштро+1):
ь.
- О +1 )
) (ак - дата);
«(,+ )«.-A«(i + i)+da(,+ 1). и записывается значение а( + т) в ячейку памяти.
/А «к/ ч ai-«(i-i)
Определяется ((i + 1} и
записывается в память.
Определяется время отсчета таймера, которое будет отсчитываться после отсчета интервала tty-At Tp, по формуле Ц i +i)
At, Atjp +
314
Запускается таймер для отсчета Ati, no истечении которого будет обеспечена подача
отпирающих импульсов, обеспечивающих(ш w(i-1)У
открывание соответствующей пары тири-мЗГ t
сторов при угле регулирования a(j + i)-записывается в память и проверяется условие
Выполняютсяоперацииуправления, какбы-/d ок ,d ок
ло описано выше.5 dP1 dt 33
После открывания тиристоров вновьЕсли условие выполняется, то расчетное
проверяется условие (03 - , а далееприращение скорости на такте определяетповторяются операции, описанные выше.ся по формуле
Если условие ф - фэу 0 не вы-10 (| + 1} (}| Гту + А)д .|t ,
полняется, то расчетное приращение скоро-определяется заданное значение скорости сти определяется по формуле
м , ,,на следующем такте переходного процесса
Даяр( + 1) (-тггОзу Ъуft rs(i + 1) - (j + 1)и записываетОпределяются15 ся в память. Определяется угол регулировад(ния на следующий такт по формуле
( + О «О + 0 WO + О записыва- + (Д д + + ются в память, как было описано выше. Оп-. ределяется и запускается таймер для+ (д (од - ftfai) отсчета ДТ| и выполняются операции уп- равления, как было описано выше. Ее-и записывается в память, ли условие ш3 -ад Дй/з выполняется, тоОпределяется Дп, запускается в тай- определяется ускорение по формулемеР для отсчета Ati и выполняются опера- А, /rfc -лЦии управления, как было описано выше.
s U U/ч - ( I t JГ) Ц J .
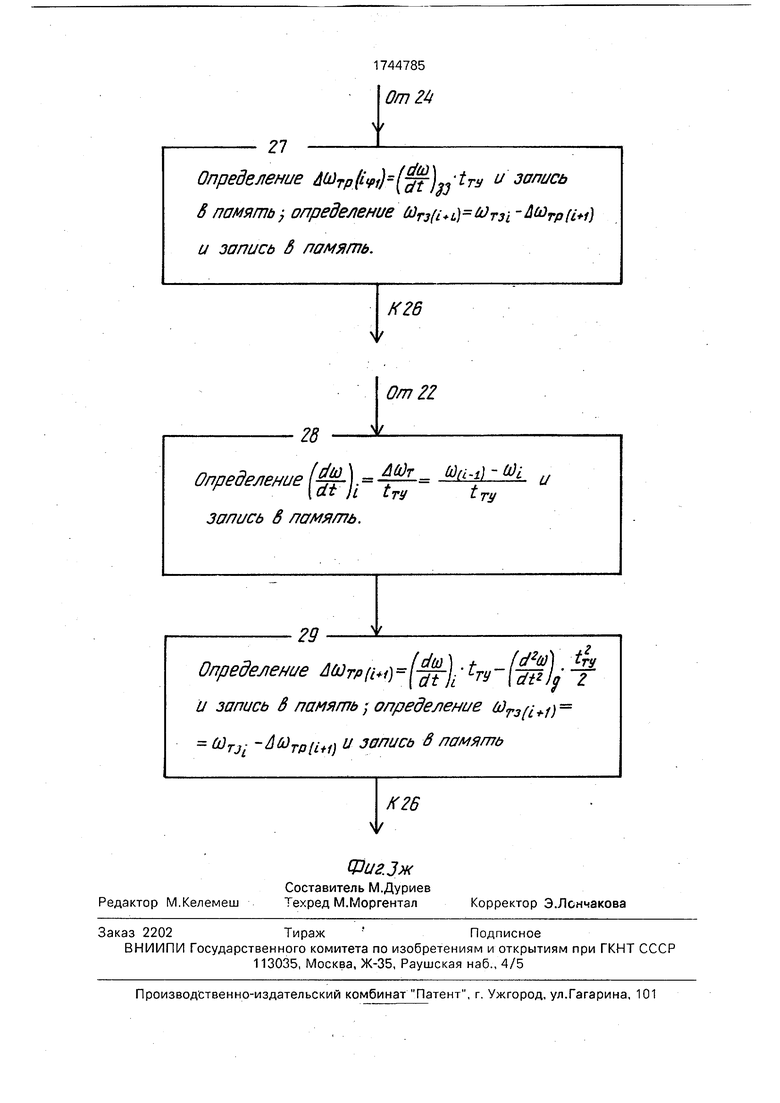
аГ tTy Если условие ( - ()33 0 не выи затем расчетное приращение скорости на
н н к нполняется, то определение расчетного приследующем такте переходного процесса оп-.
му щ жращения скорости выполняется по формуле
ределяется по формуле.
ДWP(,ту (%д4з° (i+1)()зэчту
Ul dt а далее определение Определяются (i+i) и записываются (| + 1). (i + 1) - Ati и выполнение опера- память, как было описано выше. Прове-ций управления производится, как описано ряется выполнение условиявыше.
(о)3 - ш,) - (i + 1) 0. Если условиеЕсли условие ед - а)ъ 0 выполняется,
выполняется, то угол «(i + 1) определяетсято определяется ускорение
по формуле/dftj, а( - 1) щ|
.Дог, / ч , try
«(i + 11 «i - (-х-L)i (ftJs - Wi) +о
чДо/гу v4Q и записывается в память, Определяется рас,,- ччетное приращение скорости наследующий
+ ) такт по формуле
Если условие не выполняется, то угол /d ftx d2 o
r/(i + i) определяется по формулеДй;тр(1 + 1} v . 2 2
«(, + 1) «j - (4 Д№p(i + 1) +45 а Далее определение а,3( + i), «(i 4-1), Ati
д ,и выполнение операций управления произ+ (д ат)|-(ад - )водится, как описано выше.
ft;rДля многих рабочих машин и механиз- Определяется Д ti. запускается таймер длямов заданное время разгона и замедления отсчета Д tin выполняются операции управ-50 устанавливается порядка нескольких селения, как было описано выше. Если уело-кунд в этом случае нет необходимости за вия Мз - о 0 и щ 0 не выполняются, что. такт переходного процесса принимать ин- свидетельствует о замедлении привода, тотервал дискретности тиристорного прроб- проверяется выполнение условияразователя, т. е. интервал временит между сд -ах 0, где 0)а скорость, при которой в55 подачам1/1 отпирающих импульсов на соот- конце замедления начинает уменьшатьсяветствующие пары тиристоров, обеспечива- замедление. Если условие не выполняется,ющих заданные углы регулирования, то определяется среднее значение замедле-Приращение скорости за этот интервал бу- ния на такте переходного процесса по фор-дет весьма малым и вследствие этого точ- муле
ность определения средней скорости за этот интервал будет малой. Это отразится на точности определения расчетного коэфхДогчфициента (д )i. а следовательно, и на точ-
ности регулирования. В тоже время, устанавливая такт переходного процесса равным нескольким интервалам дискретности и учитывая, что продолжительность интервала дискретности составляет 0,0066 с, можно обеспечить весьма высокую точность регулирования, поскольку продолжительность такта переходного процесса будет составлять сотые доли секунды. В этом случае при продолжительности времени разгона и замедления в несколько секунд заданное приращение скорости за такт переходного процесса будет составлять десятые доли процента от номинальной скорости двигателя и, следовательно, отклонение скоро- сти (ад - ), определяющую ошибку регулирования на каждом такте переходного процесса, будет величиной малой. Если такт переходного процесса принимается равным нескольким интервалам дискретно- сти, то в одну из ячеек перепрограммируемого запоминающего устройства записывается число интервалов дискретности и при включении устройства управления это число переписывается в один из регистров общего назначения цифрового вычислительного устройства, при каждом поступлении сигнала от компаратора программным путем это число уменьшается на 1 и осуществляется проверка содержания регистра на О. Если содержимое регистра будет равно О, то такт переходного процесса закончен. В регистр вновь записывается число интервалов дискретности и начинается вновь отсчет такта переходного процесса.
Исследования предложенного устройства показали, что по сравнению с прототипом оно обеспечивает повышение точности управления электроприводом постоянного, тока и имеет следующие преимущества: упрощается система импульсно-фазового управления тиристорным преобразователем за счет того, что формирование сдвига уп- равляющих импульсов на угол а осуществляется цифровым вычислительным устройством; повышается точность отсчета угла регулирования а , что обеспечивает равномерную нагрузку на все тиристоры преобразователя; упрощается обслуживание и повышается надежность электропривода.
Формула изобретения Устройство для цифрового управления электродвигателем постоянного тока, содержащее силовую часть тиристорного преобразователя постоянного тока, выход которого предназначен для подключения к якорю двигателя постоянного тока, обмотка возбуждения которого предназначена для подключения к сети постоянного тока, согласующий и разделительный трансформатор, первичная обмотка которого предназначена для подключения к источнику трехфазного переменного тока, три триггера, одними выходами соединенные с входами программируемого контроллера прерываний цифрового вычислительного устройства, вход сброса каждого триггера соединен с одним из разрядов регистра, входящего в состав устройства параллельного ввода-вывода цифрового вычислительного устройства, три компаратора, входы которых соединены с соседними фазными обмотками согласующего и разделительного трансформатора, выход каждого компаратора соединен с входом установки одного из триггеров, аналоговый датчик тока, соединенный с входом аналого-цифрового преобразователя, выход которого соединен с одним из регистров устройства параллельного ввода-вывода цифрового вычислительного устройства, отличающееся тем, что, с целью повышения точности управления, в него введены дополнительно цифровой датчик положения вала двигателя, шесть формирователей управляющих импульсов, вход сброса цифрового датчика положения соединен с одним из разрядов регистра, входящего в состав устройства параллельного ввода-вывода цифрового вычислительного устройства, выход цифрового датчика положения соединен с одним из регистров устройства параллельного ввода-вывода цифрового вычислительного устройства, каждый из трех выходов таймера цифрового вычислительного устройства соединен с отдельным входом программируемого контроллера прерываний этого устройства, входы каждого из шести формирователей импульсов соединены с одним из разрядов регистра параллельного ввода-вывода цифрового вычислительного устройства, выходы каждого из шести формирователей импульсов соединены с управляющим электродом одного из тиристоров силовой части тиристорного преобразователя, при этом цифровое вычислительное устройство реализует алгоритм,показанный на фиг. 3 описания.




| название | год | авторы | номер документа |
|---|---|---|---|
| Способ цифрового управления тиристорным электроприводом постоянного тока | 1988 |
|
SU1582318A1 |
| Электропривод постоянного тока | 1989 |
|
SU1646034A1 |
| Устройство для регулирования скорости электродвигателя | 1980 |
|
SU964936A1 |
| Способ стабилизации толщины изоляции кабеля и устройство для его реализации | 1982 |
|
SU1302248A1 |
| Способ прямого микропроцессорного управления тиристорным преобразователем и устройство для его осуществления | 1991 |
|
SU1838868A3 |
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |
| Электропривод постоянного тока | 1983 |
|
SU1259458A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
| Цифровое устройство формирования переходных режимов в вентильном электроприводе машины непрерывного литья | 1988 |
|
SU1595624A1 |
| Способ автоматической настройки контура регулирования тока якорной цепи тиристорного электропривода | 1989 |
|
SU1644345A1 |



Изобретение относится к электротехнике и может быть использовано для управления тиристорными электроприводами постоянного тока. Целью изобретения я вля- ется повышение точности управления. Устройство цифрового управления тиристорным электроприводом постоянного тока содержит тиристорный преобразо
Запись констант S память Вькис/ш/лельного (fflv,(%f)al
k
ГУ « Ш3
(wl
Посигналу от одного из триггеров, заданному на соответствующий вход программируемого контроллера лрерь/Вании, обеслечибается переход к подпрограмме, обеслеиибающей улрабле- ние соответствующими тирис/пореми лрео$- раэодателя. При этом определяется программным путем for, , tgt на лербом швее улрсгб- ления, а затем на последующих шагах At;; запускается таймер, за /пакт переладного процесса определяется среднее значение скорости (d;} тока 1я и записываются д ячейку памяти.
Запись Wi - (и 8 ячейку, предназначенную для запоминания ft)T3i
Подача управляющих импульсов с использованием таймера на тиристоры через интервал бремени AtTPJ аВеслечи&ающий запирающий угол otmcjf.
ОтЗ
К22
/
I Qm 3
№
кг
-
Нет
кг
Да I Ш орение)
Нет
t
Фиг. За
Определение Ati и подача управляющих имлульсой но тиристоры с использованием таймера10
v
Запись В ячейку памяти узла
, ldl f
(
От 8
/
Определение &). ™L
(Cft It trytry
и запись в память
1744785
От 8
AYJ
f
Фиг. 36
Определение MrplM..tn + №$Y -JF
V
и запись 6 помять. Определение Югз№ Ютз ь+ДМтрЦ+п и запись Ј память.
15
V
Определение f)(-). ДШТра+1}}8сСа+1 / As/ IitiMi 11
(ЖтгЛ T3i ) r° v/; ) запись oЈ(i+,) & ячейку памяти) определение
iffi/fi+f) u золись & помять- определение At-t - JM +№ГР и flodcwa управляющих импульсоб но тиристоры с использованием
таймера. Уерез интер&ал t#/j -jjj- подача управляющих имлульсоб но тирис/яоры.
V
Фиг.ЗВ
16
t
I LS-
Определение ДМгра+л - rjr} ry и запись 8 память / определение tursii+i) rst + A®rp(ii-t) и запись в память.
Определение (-&} 4 . й) r{at / try try
и запись в ломять.
Определение №„(+ Щ- try-(Щ- и запись б память. Определение dJryf /) гз1 + d®rp/i+ri v эолись 8 память.
Да KZQ
фигЗг
К21
20v
Определение dti, /Ч + H j /W rj/J; запись 6 ячейку памяти; определение УГ)# d и запись S память. Определение sti,( +&tTp и подача управляющих имлульсав на /пиристорь/ е ислоль зобанием таймера. Уерез ин/пербал бремени
iir подана управляющих умлульсод на лпим/- J14с/пары.
21
HZ 0m19
Определение ()/ №ГР/М
($ё & ®ni) 3a/iucb (itl) 6 ™
M fnu-J- L и запись В память. Определение Ati Jl t +dtw и nadffva упрабляющих импульсоё на wupuc/поры с использованием таймера Через интервал бремени подача управляющих импульсов на /лирис/лоры.
HZ 0m19
Н28
av(p).,. ,,
запись Ј память
Определение (%}№$$ Т и запись & память / определение
Мп/1+/) &гз; - AUrptt+n U JO/7(JCb Ј помять.
26
Определение .1} (. /
) ofц) ofi + AaC(ht + 8aL(i+i) и ЗОШСА tffi.f)
3 память определение /т) и запись S
. - Ј( °fi
314
+ Atrp
память j определение df;
и подача улрабляющих импульсов на тс/рис/лоры
с использованием таймера. Через интер&ал
СТ t у
Времени tr, лодача управляющих импульсоб на тиристоры
К27
) и запись S
. - Ј( °fi
314
+ Atrp
Фиг.Зе
Определение №тррчч)) и запись 6 память-7 определение u}rjfi-n)&r3i №rp(i+i} и запись & память.
Определение (4fj-}. запись S память.
29
------- Ј3
Определение Шг,м-( Щ $ и запись В память; определение Л)гз) - (jdrj- -AttTp i+i) u запись в память
OmZit
От 22
АЬ)Т tifi-i) - ML
trytTy
| Устройство для регулирования скорости вращения электродвигателя | 1981 |
|
SU955471A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ цифрового управления тиристорным электроприводом постоянного тока | 1988 |
|
SU1582318A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
