туры, связанные соответственно с формирователем 7т -фазного напряжения и через формирователь 10 импульсов -СП -канальным блоком 8 памяти, П информационных входов которого подключены к выходам h-канального распределителя 12 импульсов, а выходы - к п-входовому анализатору 13 прямой и обратной последовательнос1
Изобретение относится к электротехнике, в частности к электроприводу, и может быть использовано для получения информации о направлении вращения ротора электромеханических устройств, например вентильного электродвигателя, а также в устройствах, служащих для защиты объектов от неправильного направления вращения„
Цель изобретения - повьшение точ- нести определения направления вращения без усложнения электромеханической части устройства.
На фиг. 1 изображена блок-схема предлагаемого устройства; на фиг.2 - то же, для электромеханического преобразователя с трехфазным первичным контуром на фиг. 3-5 - диаграммы, поясняющие работу устройства, (индексы обозначений потенциалов на элементах схемы на диаграммах соответствуют позициям элементов фиг.1 и 2).
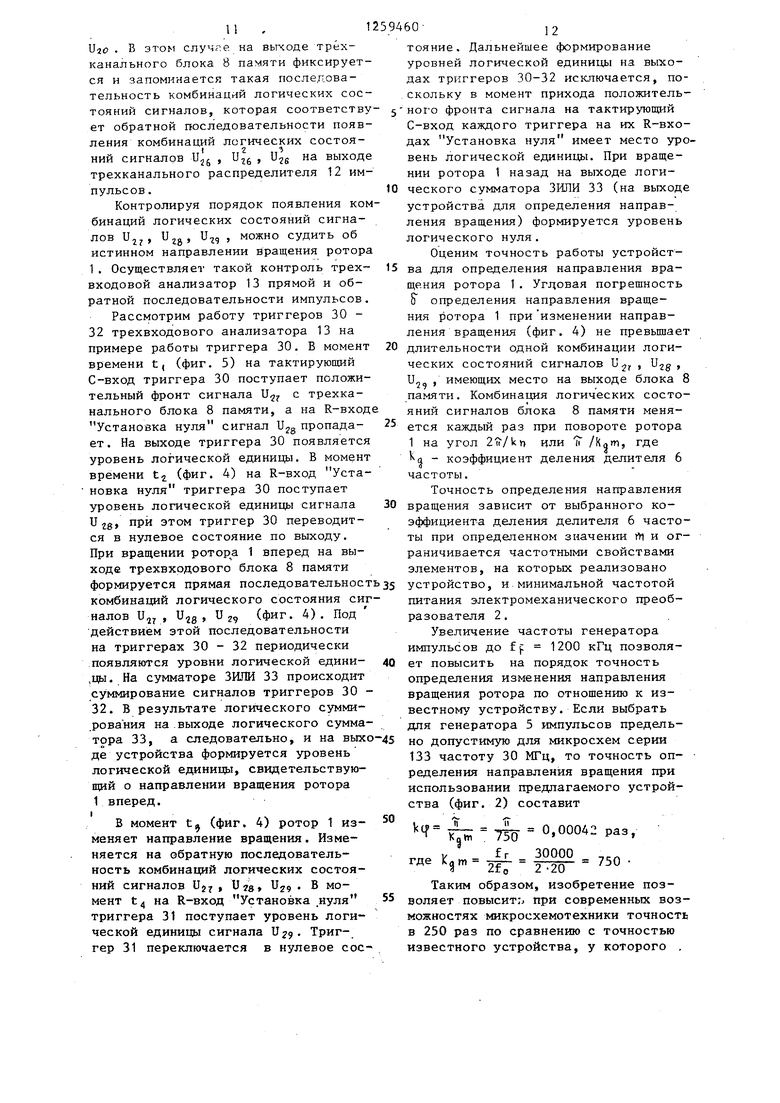
Устройство для определения направления вращения ротора (фиг. 1) со- держит установленный на роторе 1 электромеханический преобразователь 2 с первичным 3 In -фазным и вторичны 4 однофазным электрическими контурами, генератор 5 импульсов, делитель 6 частоты, формирователь 7 tri -фазного напряжения, п -канальный блок 8 памяти с одним управляклцим 9 и п информационными входами и формирователь 10 импульсов. Через формиро- ватель 10 импульсов управляющий вход 9 h -канального блока 8 памяти связан с выходом вторичного однофазного электрического контура А электромеханического преобразователя 2, пер59460
тн импульсов. Точ гость определения направления вращения зависит от выбранного коэффициента деления делителя 6 частоты при определенном значении m и ограничивается как частотными свойствами элементов устройства, так и минимальной частотой питания преобразователя 2. 5 ил.
вичный т -фазный электрический контур 3 которого подключен к выходу формирователя 7 m -фазного напряжения. Вход формирователя 7 пп-фазного напряжения подключен к выходу делителя 6 частоты, вход 11 которого связан с выходом генератора 5 импульсов. Устройство также содержит п -канальный распределитель 12 импульсов и h-входовой анализатор 13 прямой и обратной последовательности импульсов, каждый -и вход которого подключен к t -му выходу h -канального блока 8 памяти, п информационных входов и-канального блока 8 памяти подключены соответственно к п выходам П -канального распределителя 12 импульсов, вход которого подключен к выходу генератора 5 импульсов, выход 14 анализатора 13 прямой и обратной последовательности является выходом всего устройства.
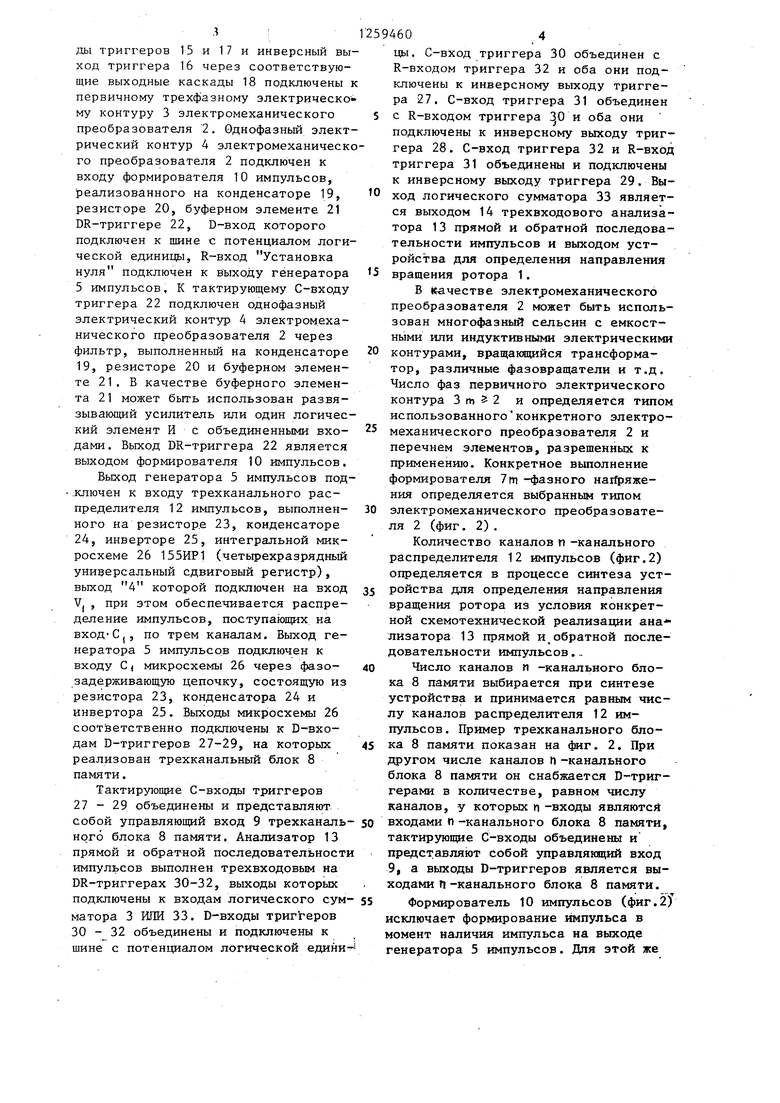
В устройство для определения направления вращения ротора 1 для электромеханического преобразователя 2 с трехфазным первичным контуром (фиг. 2) формирователь 7 трехфазного напряжения реализован на D-триггерах 15 - 17 с соответствующими выходными каскадами 18. Информационные D-входы триггеров подключены следующим образом: D-вход триггера 15 подключен к прямому выходу триггера 16, D-вход триггера 16 - к прямому выходу триггера 17, а D-вход триггера 17 - к инверсному выходу триггера 15. Тактирующие С-входы триггеров 15-17 объединены и представляют собой вход формирователя 7 трехфазного напряжения. Прямые выхо
ды триггеров 15 и 17 и инверсный выход триггера 16 через соответствующие выходные каскады 18 подключены к первичному трехфазному электрическо му контуру 3 электромеханического преобразователя 2. Однофазньш электрический контур 4 электромеханического преобразователя 2 подключен к входу формирователя 10 импульсов, реализованного на конденсаторе 19, резисторе 20, буферном элементе 21 DR-триггере 22, D-вход которого подключен к шине с потенциалом логической единицы, R-вход Установка нуля подключен к выходу генератора 5 импульсов, К тактирующему С-вхрду триггера 22 подключен однофазный электрический контур 4 электром.еха- нического преобразователя 2 через фильтр, выполненный на конденсаторе 19, резисторе 20 и буферном элементе 21. В качестве буферного элемента 21 может быть использован развязывающий усилитель или один логический элемент И с объединенными входами. Выход DR-триггера 22 является выходом формирователя 10 импульсов.
Выход генератора 5 импульсов под- .ключен к входу трехканального распределителя 12 импульсов, выполненного на резисторе 23, конденсаторе 24, инверторе 25, интегральной микросхеме 26 155ИР1 (четырехразрядный универсальный сдвиговый регистр), выход 4 которой подключен на вход V. , при этом обеспечивается распределение импульсов, поступающих на вход С(, по трем каналам. Выход генератора 5 импульсов подключен к входу С( микросхемы 26 через фазо- задерживающую цепочку, состоящую из резистора 23, конденсатора 24 и инвертора 25. Выходы микросхемы 26 соответственно подключены к D-BXO- дам D-триггеров 27-29, на которых реализован трехканальный блок 8 памяти.
Тактирующие С-входы триггеров 27 - 29 объединены и представляют собой управляющий вход 9 трехканального блока 8 памяти. Анализатор 13 прямой и обратной последовательности импульсов выполнен трехвходовым на DR-триггерах 30-32, выходы которых подключены к входам логического сумматора 3 ИЛИ 33. D-входы триггеров 30 - 32 объединены и подключены к шине с потенциалом логической едини4604
цы. С-вход триггера 30 объединен с R-входом триггера 32 и оба они подключены к инверсному выходу триггера 27. С-вход триггера 31 объединен с R-входом триггера и оба они подключены к инверсному выходу триггера 28. С-вход триггера 32 и R-вход триггера 31 объединены и подключены к инверсному вькоду триггера 29. Выход логического сумматора 33 является выходом 14 трехвходового анализатора 13 прямой и обратной последовательности импульсов и выходом устройства для определения направления
вращения ротора 1.
В Ячестве электромеханического преобразователя 2 может быть использован многофазный сельсин с емкостными или индуктивными электрическими
контурами, вращающийся трансформатор, различные фазовращатели и т.д. Число фаз первичного электрического контура 3 m 2 и определяется типом использованного конкретного электромеханического преобразователя 2 и перечнем элементов, разрешенных к применению. Конкретное выполнение формирователя 7in -фазного найряже- ния определяется выбранным типом
электромеханического преобразователя 2 (фиг. 2).
Количество каналов п-канального распределителя 12 импульсов (фиг.2) определяется в процессе синтеза устройства для определения направления вращения ротора из условия конкретной схемотехнической реализации ана- лизатора 13 прямой и обратной последовательности импульсов,..
Число каналов м -канального блока В памяти выбирается при синтезе устройства и принимается равным числу каналов распределителя 12 импульсов. Пример трехканального блока 8 памяти показан на фиг. 2, При другом числе каналов И-канального блока 8 памяти он снабжается D-триг- герами в количестве, равном числу каналов, у которых п -входы являютсй
входами Г)-канального блока 8 памяти, тактирующие С-входы объединены и представляют собой управляющий вход 9, а выходы D-триггеров является выходами П -канального блока 8 памяти.
Формирователь 10 импульсов (фиг.2) исключает формирование импульса в момент наличия импульса на выходе генератора 5 импульсов. Для этой же
j1
цели служит фазозадерживающая цепочка,, выполненная на резисторе 23, кон денсаторе 24 и инверторе 25. Это устраняет влияние нестабильности выходного напряжения однофазного электрического контура 4 электромеханического преобразователя 2, свойственной отдельным типа} электромеха
нических преобразователей 2, в частности сельсинам с контактным съемом напряжения с вторичного электрического контура 4. Нестабильность выходного напряжения этих сельсинов заключается в неоднозначности момента перехода выходного напряжения через нуль и соизмерима с частотой импульсов генератора 5. Связь генератора 5 импульсов с формирователем 10 импульсов и наличие фазозадержи- вающей цепочки используются не всегда. Их необходимость определяется конкретным типом используемого в устройстве электромеханического преобразователя 2.
Вход 11 делителя 6 частоты может быть подключен к выходу генератора 5 импульсов или к одному из выходов fi-канального распределителя 12 импульсов. В последнем случае коэффициент деления частоты генератора 5 импульсов может быть увеличен при использовании одного и того же делителя 6 частоты.
Рассмотрим принципиальную возможность точного контроля изменения направления вращения ротора 1 при использовании предлагаемого устройства.
За счет подачи внешнего многофазного напряжения на первичный т-фазный электрический контур 3 эле тромёханического преобразователя 2 в расточке его статора создается вращающееся поле. При этом сигнал UQ на вторичном однофазном электрическом контуре 4, находяще1 ся в это поле, пропорционален величине
,t-q-(t). (1)
и„ sinL2Vf t-q-C(t),
частота возбуждения фазных обмоток первичного электрического контура 3{ угловая координата (положение) вторичного электрического контура 4, связанного с ротором 1{ текущая координата времени
Таким образом, сигнал вторичного электрического контура 3 электромеханического преобразователя 2 при достаточно большой частоте fg дает практически непрерывную во времени информацию с значении угловой координаты ротора 1, независимую от изменений скорости вращения. Для определения направления вращения необходимо зафиксировать ряд последовательных положений ротора 1 в виде И периодически меняющихся электрических сигналов, у которых последовательность комбинаций логических
состояний соответствует последовательности дискретных положений ротора 1, Форма сигналов может быть любой, однако с точки зрения простоты обработки информации целесообразно ее иметь прямоугольной.
Преобразование фазомодулированно- го сигнала в требуемые виды сигналов можно охарактеризовать следующим об- разом. Пусть на выходе h - канального распределителя 12 импульсов имеется П периодических сигналов, частота
которых f, кратна fp
30
( )+А, (2)
-коэффициент кратности (целое число),
-угловая постоянная J
1, ...,п,- А О, . . ., 1.
Положим, что значения этих сигналов фиксируются и запоминаются в моменты времени (J, временные интер- валь мезкду которыми определяются периодом изменения функции (1), т.е. согласно соотношению
(f(td)0, 2-, 41
d2ir. (3)
Согласно выражению (3) значения моментов фиксации равны
. d К t а),, ч
tj f- -pTf-.(4)
to n tg
В результате фиксаций и запоминания сигналов (2) в моменты времени tj может быть получена определенная последовательность комбинаций логических состояний сиг налов (2) .
Выражение для этой последователь,- ности комбинаций логических состояний сигналов может быть записано при подстановке в выражение (2) значений t j
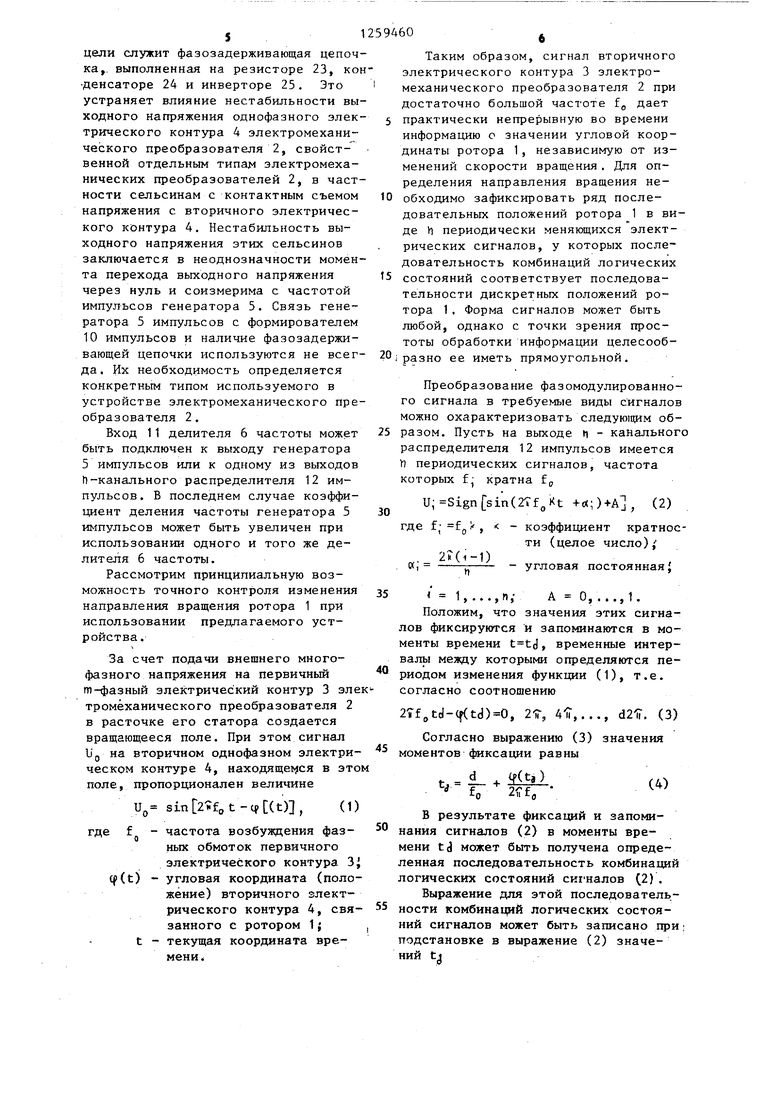
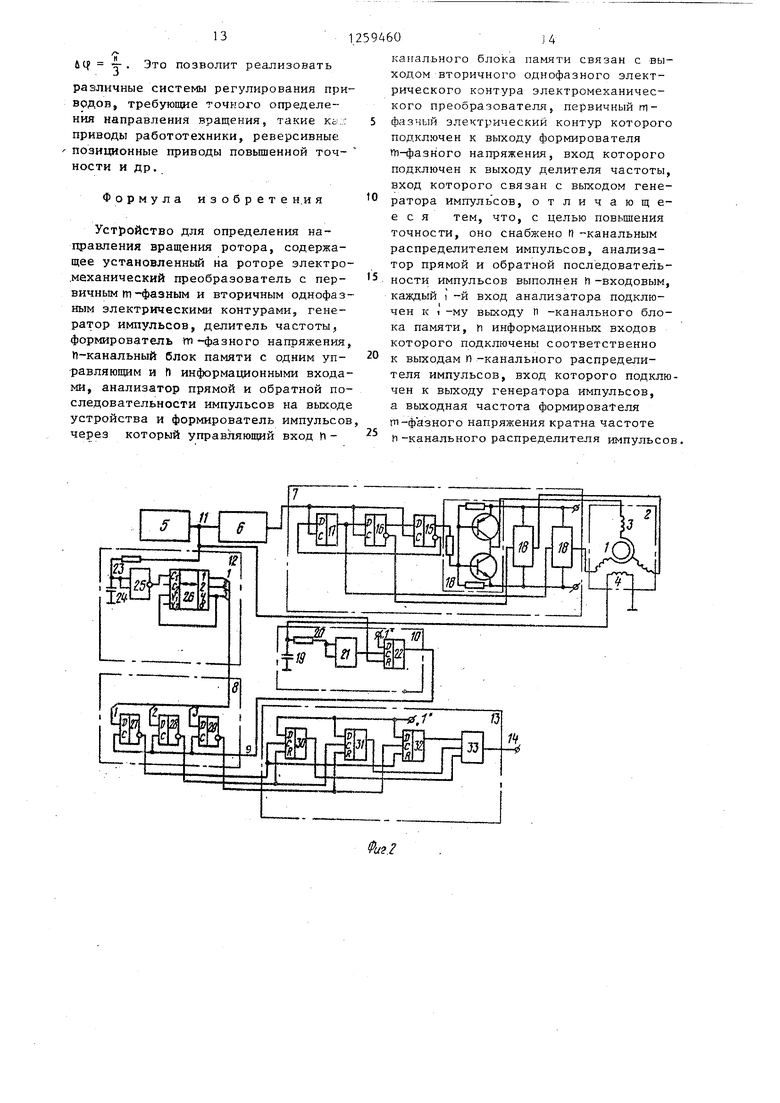
ся фаза сигнала, наведенного на вторичном электрическом контуре 4 ( , фиг. 3). В дальнейшем ротор 1 остается в покое. Импульсы U,(, на выходе формирователя 10 импульсов появляют- ся в моменты времени t., t, tj. Парйод их появления равен периоду вращения магнитного поля, наведенного в расточке электромеханического преобразователя 2 (или периоду- сигналов и ,j , и 16, и,7 ) , фаза сигнала U, изменяется на величину углового перемещения ротора 1 и равна о, .
Таким образом, моменты появления импульсов и,о на выходе формировате- ля 10 импульсов находятся в прямой зависимости от углового положения ротора 1 .
Одновременно с наведением магнитного поля в расточке электромеханического преобразователя 2 на выходе трехканального распределителя 12 импульсов вырабатывается последовательность импульсов Ujg, Uj(фиг.4) Частота этих импульсов кратна и вьше частоты вращения поля .электромеханического преобразователя 2. Соотношение указанных частот определяется вьфажением (7). Импульсы V, U, Ugg поступают на информационные D- входы D-триггеров 27-29 трехканального блока 8 памяти. В моменты прихода импульса с формирователя 10 импульсов (t, и12, фиг. .4) на управляющий вход 9 трехканального блока 8 памяти последний запоминает комбинацию логических состояний сигТТ Т1 тт
налов , , которые имели место на информационных D-входах триггеров 27 - 29. Если ротор 1 не изменяет своего-углового положения, то не меняется и фаза импульсов U((j , вырабатываемых формирователем 10 импульсов, относительно напряжения формирователя 7 трехфазно- го напряжения. Поскольку напряжения формирователя 7 трехфазного напряжения и трехканального распределителя 12 импульсов сфазированы между собой и частоты их кратны, т.е. начало каждого k-го периода сигнала } совпадает с началом периода напряжения формирователя 7, то при отсутствии углового перемещения ротора 1 на входе трехканального блока 8 памяти в момент прихода импульса будет иметь место одна и та же комбинация логических состо5
s
5
яний сигналов и , и , U . Комбинация логических состояний сигналов и77 Ujg , U.J, на выходе трехканального блока 8 памяти также не меняется,
Изменение углового положения ротора 1 при его вращении вызывает изменение фазы импульса U,o на каждом периоде вращения магнитного поля в расточке электромеханического преобразователя 2. Изменение фазы им
пульса и,р происходит относительно напряжений U, , .U, , U,, формирователя 7 трехфазного напряжения и сигI 2.
налов , , U26 трехканального распределителя 12 импульсов.
Это приводит к тому, что на выходе трехканального блока 8 памяти .последовательно фиксируются и за-i- поминаются комбинации логических
1 3
сигналов , , U, присутст- вукицих на входе этого блока в момент прихода импульса Uio .
Появление импульса U, возможно только в тот момент, когда он не совпадает с фронтами сигналов , 26 гв- Это сделано для того, чтобы исключить неоднозначность при запоминании комбинации логических состояний сигналов. Достигается зто за счет использования в трех- канальнам распределителе 12 импульсов фазозадерживающей цепочки, реализованной на резисторе 23, конденсаторе 24 и элементе НЕ 25, и подключения R-входа Установка нуля DR-триггера 22 к выходу генератора 5 импульсов.
При вращении ротора 1 в определенном направлении знак приращения файы импульса U,g постоянный, а при изменении направления вращения он меняется на обратный. Допустим, что при вращении ротора 1 вперед имеет место положительное приращение фазы сигнала и,о(Фиг. 4). При каждом периоде сигнала U фаза импульса UK, изменяется в положительную сторону, и на выходе блока 8 памяти фиксируется и запоминается последовательность логических состояний сигналов, соответствующая прямой последовательности появления комбинаций логических состояний сигналов U, Ug, Ujg на выходе трехканального распределителя 12 импульсов.
При вращении ротора 1 назад фаза импульса U,g имеет отрицательное при- ращение на каждом периоде сигнала
71
(tp+oC,J+A, (5)
По виду сигнала (5) можно сделать вывод, что он также соответствует непрерывному сигналу вида
- (t) + o;i + А, (6)
Скорость изменения угловой координаты ротора 1 tf (t) конечна, поэтому скорость изменения функции (t) +о(; и частота перемены полярности (6) ограничены. При эт.ом условии выходной сигнал запоминающего звена с увеличением частоты f, все более приближается к (6). Поэтому в результате описанной последовательности операций может быть получен сигнал, как угодно близкий к (6) .
Если ротор 1 находится в состоянии покоя, изменение cp(t) отсутствует . При этом в моменты времени Cf(ti), интервал между которыми характеризуется выражением (3), при фиксировании запоминается одна и та же комбинация логических состо- яний сигналов (2), свидетельствую- щая об отсутствии перемещения рото- ра 1 .
Если произойдет изменение углового положения ротора 1 на дч , то при фиксировании запоминается другая комбинация логических состояний сигналов (2), свидетельствутощая об изменении углового положения. Контроль порядка следования комбинаций , логических сигналов (2) позволяет судить о направлении вращения ротора 1 .
В частном случае, когда число дискретных комбинаций логических состояний сигналов п -канального распределителя 12 импульсов равно k , точность определения направления вращения равна
iq 2if/kn.
(7)
и зависит от соотношения частоты вращающегося поля f в расточке электромеханического преобразователя 2, определяемого частотой напряжения формирователя hi-фазного напряжения, и частоты сигналов ц -канального распределителя 12 импульсов U.; (2), и числа дискретных комбинаций логических состояний сигналов п-канального распределителя 12 импульсов.
8
Указанная точность может быть на несколько порядков выше по сравнению с точностью известных устройств для определения направления вращения при соответствующем выборе Кип. Устройство для определения направления вращения ротора работает следующим образом.
После деления частоты импульсов
и5 генератора 5 импульсов на выходе делителя 6 частоты формируется последовательность импульсов Ug (фиг. 3). Под действием импульсов Ug на выходе D-триггеров 15-17 формируются сигналы и, ,. U|5, U,, длитель- . ностью и каждый, сдвинутые относительно друг друга на 2ii/3. Эти сигналы через выходные каскады 18 (фиг. 2) поступают в первичный электрический контур 3 электромеханического преобразователя 2.
Под действием напряжения формирователя 7 трехвазного напряжения, имеющего во времени шесть дискретньпс состояний, и за счет конечного времени протекания переходного процесса в элек;трических контурах электромеханического преобразователя 2 в расточке последнего создается вращающееся магнитное поле, наводящее во вторичном электрическом контуре 4 напряжение, меняющееся по периодическому закону и соответствующее виду (1). После прохождения через
фильтр, выполненный на конденсаторе 19 и резисторе 20, оно имеет вид и2рИли и,;, (фиг. 3) после буферного элемента 21. Формирователь 10 импульсов формирует импульс напряжения
U,Q в момент перехода напряжения U через нулевой потенциал при изменении его знака с - на + и при отсутствии импульса и с выхода генератора 5 импульсов.
g течение времени t,-t (фиг. 3) ротор 1 находится в покое, взаимное угловое положение электрических контуров 3 и 4 электромеханического преобразователя 2 не меняется. Фаза
импульсов Up не меняется относительно трехфазного напряжения формирователя 7. В течение времени ротор 1 находится в движении, изменяет свое угловое положение на угол
ot, и останавливается. Происходит изменение углового положения электрических контуров 3 и 4 электромеханического преобразователя 2. МеняетП ,1259460
. В этом случае на вьгчоде трёх- канального блока 8 памяти фиксируется и запоминается такая последовательность комбинаций логических состояний сигналов, которая соответствует обратной последовательности появления комбинаций логических состояI 2 3
НИИ сигналов U , Uj , на выходе
12 им10
15
20
25
30
трехканального распределителя пульсов.
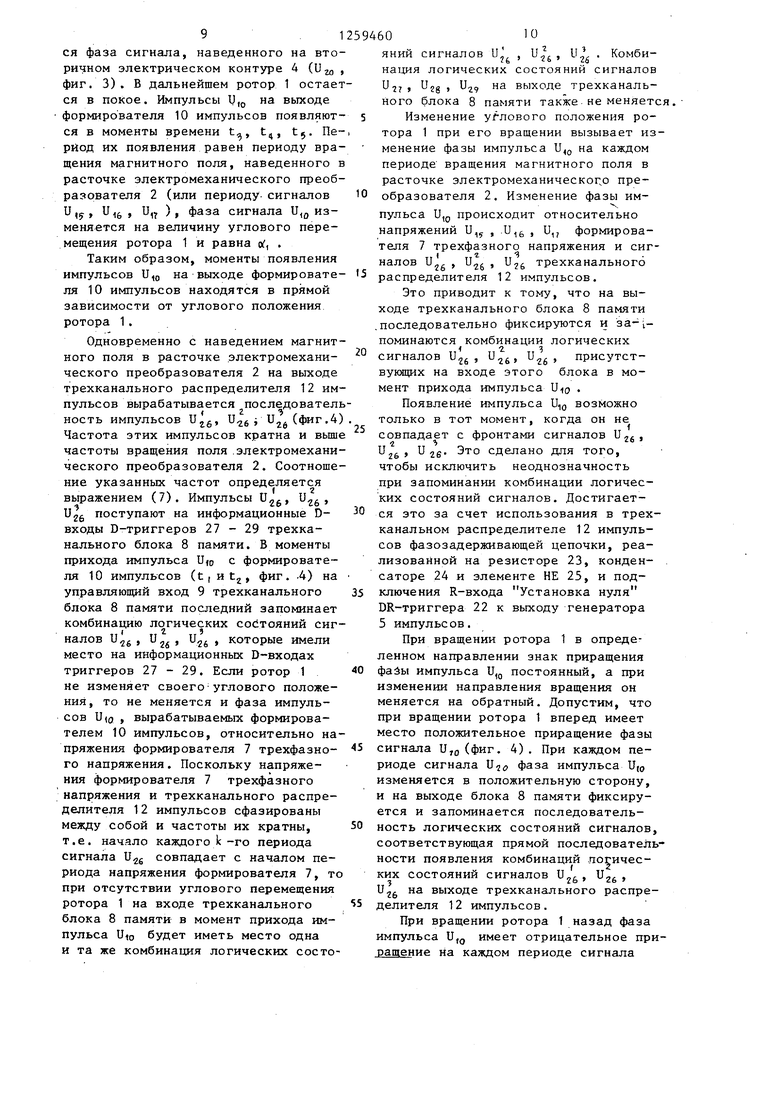
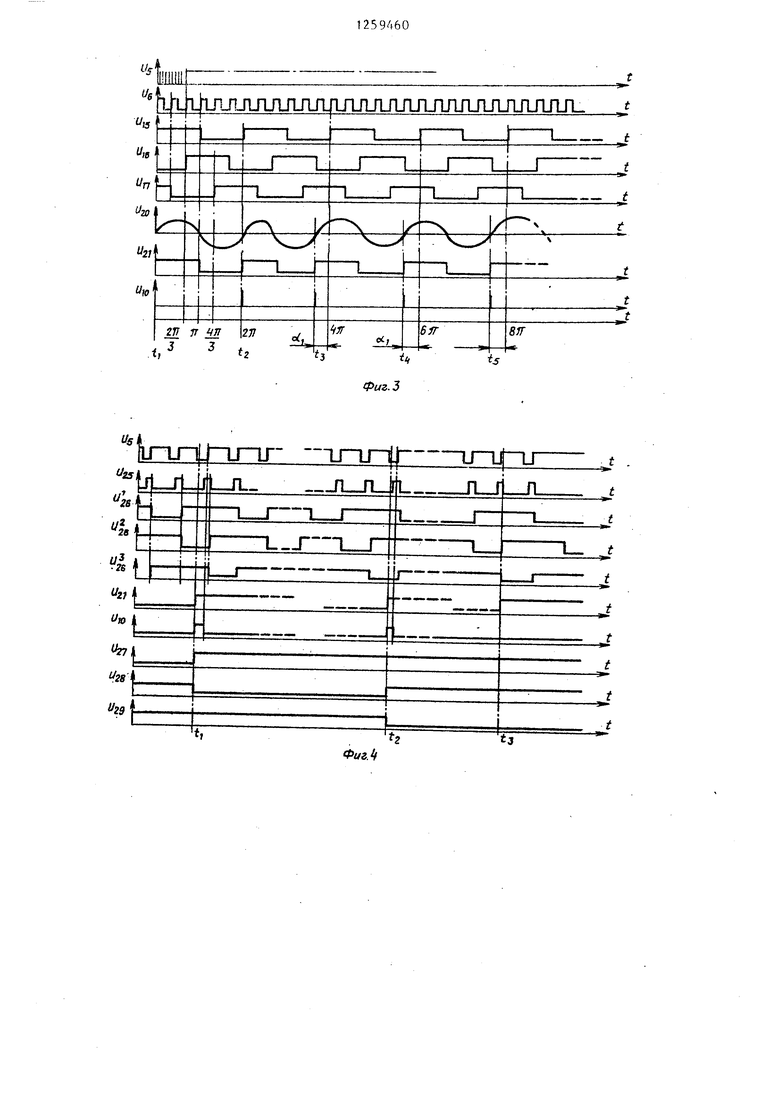
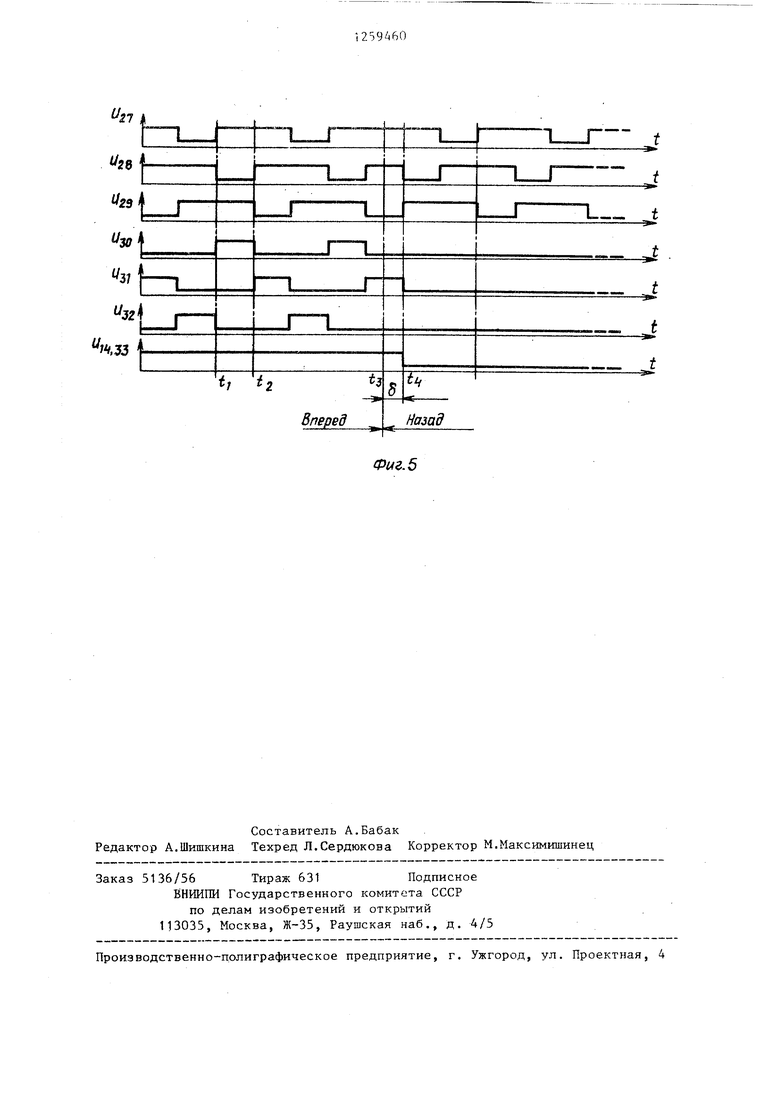
Контролируя порядок появления комбинаций логических состояний сигналов и, , т- судить об истинном направлении вращения ротора 1. Осуществляет такой контроль трех- входовой анализатор 13 прямой и обратной последовательности импульсов. Рассмотрим работу триггеров 30 - 32 трехвходового анализатора 13 на примере работы триггера 30. В момент времени t( (фиг. 5) на тактирующий С-вход триггера 30 поступает положительный фронт сигнала U с трехканального блока 8 памяти, а на R-входе Установка нуля сигнал пропадает. На выходе триггера 30 появляется уровень логической единицы. В момент времени t (фиг. 4) на R-вход Уста- новка нуля триггера 30 поступает уровень логической единищз сигнала Ujg, при этом триггер 30 переводится в нулевое состояние по выходу. При вращении ротода 1 вперед на выходе трехвходового блока 8 памяти формируется прямая последовательность 35 комбинаций логического состояния сигналов и,; , , и 29 (фиг. 4). Под действием этой последовательности на триггерах 30 - 32 периодически появляются уровни логической едини- 40 цы. На сумматоре ЗИПИ 33 происходит суммирование сигналов триггеров 30 - 32. В результате логического суммирования на .выходе логического сумматора 33, а следовательно, и на выхо-45 де устройства формируется уровень логической едини11 1, свидетельствующий о направлении вращения ротора 1 вперед.
В момент t (фиг. 4) ротор 1 изменяет направление вращения. Изменяется на обратную последовательность комбинаций логических состояний сигналов Uj 29 мо мент t4 на R-вход Установка нуля триггера 31 поступает уровень логической единицы сигнала Ujj- Триггер 31 переключается в нулевое состоур да ск 5 но Сдаве ни че ус ле ло
ва ще ни ле дл че
и
па ян ет 1 ча
вр эф ты ра эл ус пи ра
имп ет опр вр вес дл но 13 ред исп ств
50
55
k(
гд
вол мож в 2 изв
12
0
5
0
5
0
тояние. Дальнейшее формирование уровней логической единицы на выходах триггеров 30-32 исключается, поскольку в момент прихода положитель- 5 ног о фронта сигнала на тактирующий Свход каждого триггера на их R-BXO- дах Установка нуля имеет место уровень логической единицы. При вращении ротора 1 назад на выходе логического сумматора ЗИПИ 33 (на выходе устройства для определения направления вращения) формируется уровень логического нуля.
Оценим точность работы устройства для определения направления вращения ротора 1. Угдовая погрешность 5 определения направления вращения ротора 1 при изменении направления вращения (фиг. 4) не превышает длительности одной комбинации логических состояний сигналов U, . U,
2г и , имеющих место на выходе блока 8
памяти. Комбинация логических состояний сигналов блока 8 памяти меняется каждый раз при повороте ротора 1 на угол . или IT , где коэффициент деления делителя 6 частоты.
Точность определения направления вращения зависит от выбранного коэффициента деления делителя 6 частоты при определенном значении rti и ограничивается частотными свойствами элементов, на которых реализовано устройство, и минимальной частотой питания электромеханического преобразователя 2.
Увеличение частоты генератора импульсов до ff 1200 кГц позволяет повысить на порядок точность определения изменения направления вращения ротора по отношению к известному устройству. Если выбрать для генератора 5 импульсов предельно допустимую для микросхем серии 133 частоту 30 МГц, то точность определения направления вращения при использовании предлагаемого устройства (фиг. 2) составит
k(
где
п
к Q Vtl
у fr 30000
Кл т - - -
ТЗО 00042 раз, 750
2f о Таким образом, изобретение позволяет повысить при современных возможностях микросхемотехники точность в 250 раз по сравнению с точностью известного устройства, у которого ,
fit .
13
Это позволит реализовать
различные системы регулирования приводов, требующие точного определения направления вращения, такие кв./: приводы работотехники, реверсивные позиционные приводы повьппенной точности и др.
Формула изобрете н.и я
Устройство для определения направления вращения ротора, содержащее установленный на роторе электро- .механический преобразователь с первичным m -фазным и вторичным однофазным электрическими контурами, генератор импульсов, делитель частоты, формирователь w -фазного напряжения, П-канальный блок памяти с одним управляющим и П информационными входами, анализатор прямой и обратной последовательности импульсов на выходе устройства и формирователь импульсов, через который управляющий вход hto
1259460)4
канального блока памяти связан с выходом вторичного однофазного электрического контура электромеханического преобразователя, первичный т- фазчый электрический контур которого подключен к выходу формирователя т-фазного напряжения, вход которого подключен к выходу делителя частоты, вход которого связан с выходом генератора импульсов, отличающееся тем, что, с целью повьшения точности, оно снабжено И-канальным распределителем импульсов, анализатор прямой и обратной последовательности импульсов выполнен П-входовым, каждый i -и вход анализатора подключен к 1 -му выходу И -канального блока памяти, п информационных входов которого подключены соответственно к выходам п-канального распределителя импульсов, вход которого подключен к вьпсоду генератора импульсов, а выходная частота формирователя т-фазного напряжения кратна частоте и-канального распределителя импульсов,
15
20
25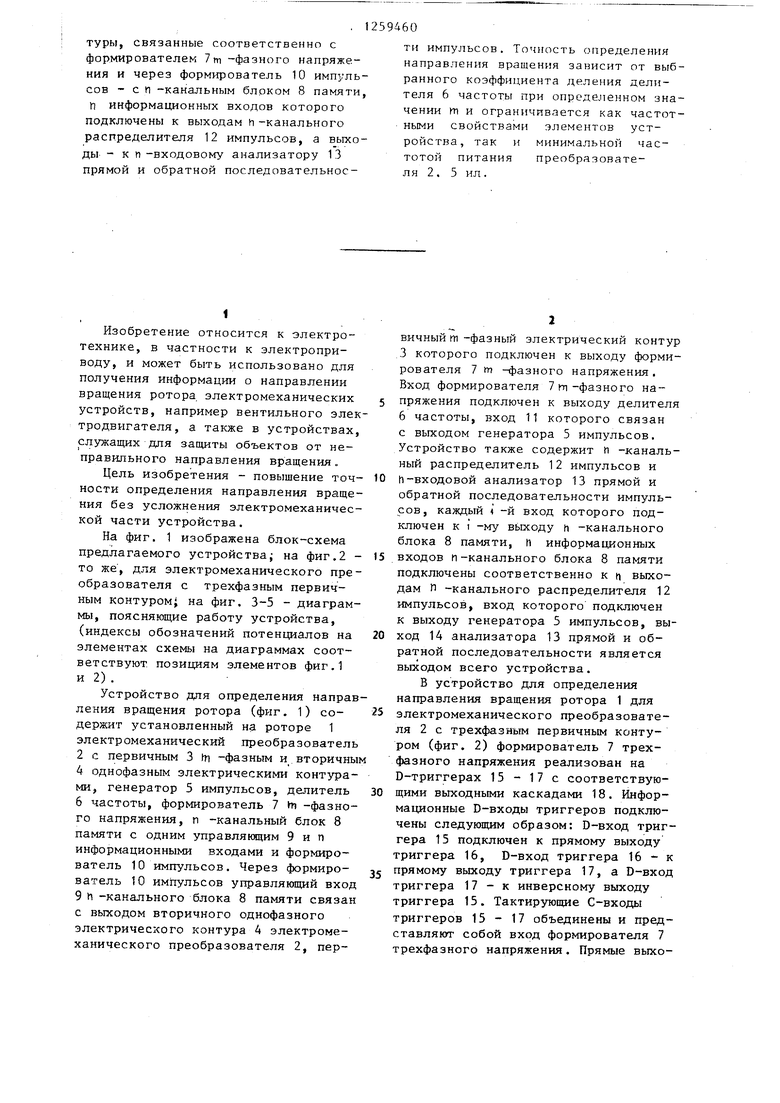
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления преобразователем постоянного напряжения в квазисинусоидальное с промежуточным высокочастотным преобразованием | 1981 |
|
SU1297198A1 |
| Вентильный электродвигатель | 1983 |
|
SU1164828A1 |
| Вентильный электродвигатель | 1984 |
|
SU1259461A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086535A1 |
| Устройство для управления вентильным электродвигателем | 1984 |
|
SU1259462A1 |
| Устройство для определения направления вращения вентильного электродвигателя | 1984 |
|
SU1252901A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| Шаговый электропривод (его варианты) | 1984 |
|
SU1246323A1 |
| Вентильный электродвигатель | 1984 |
|
SU1325632A1 |
| Вентильный электродвигатель | 1987 |
|
SU1492443A1 |
Изобретение относится к электротехнике, в частности к электроприводу, и может быть использовано для получения информации о направлении вращения ротора электромеханических устройств, напр., вентильного электродвигателя, а также в устройствах, служащих для защиты объектов -от не- . правильного направления вращения. Целью изобретения является повышение точности oпpe :l;eлeния направления вращения без усложнения электромеханической части устройства. Установленный на роторе 1 электромеханический преобразователь 2 содержит первичный 3 и вторичный 4 эл. конс « (Л
hjifijuijijuimiJirq
-tinm
%
Фиг. 5
| Устройство для определения направления вращения вентильного электродвигателя | 1981 |
|
SU1022277A1 |
| Устройство для определения направления вращения вентильного электродвигателя | 1981 |
|
SU1022278A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Усышкин Е.И., Зельдин В.Ш.Преобразование информации многоцелевого дат.чика для автоматизированных микропроводов | |||
| - Электричество, 1977, № 5, с | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
