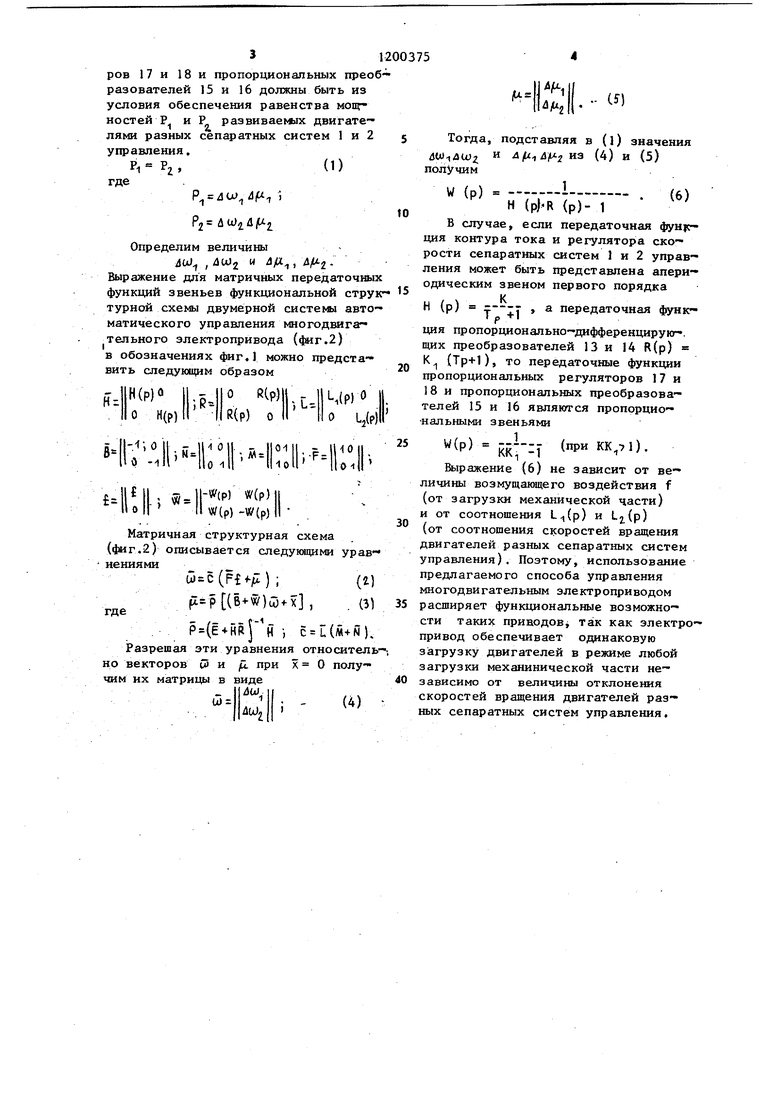
оо ел « Изобретение относится к электротехнике и может быть использовано в механизмах с несколькими привод- ными электродвигателями, например ц высокопроизводительных ленточных |сонвейерах. Целью изобретения является повышение точности поддержания равенства развиваемых асинхронными элект двигателями мощностей, На фиг.} представлена структур ная схема двухдвигательного вариант электропривода, в котором валы асин хронных электродвигателей жестко соединены; на фиг,2 - то же, в матричной , Электропривод содержит сепаратны системы 1 и 2 управленияj асинхронными электродвигателями выполненным по схеме асинхронно-вентильного кас када. Первая 1 и вторая 2 сепаратные системл управления содержат соответ ственно первые сумматоры 3 и 4, элементы 5 и 6 сравнения, вторые сумматоры 7 и 8, регуляторы 9 и 10 тока и регуляторы 11 и 12 скорости, пропорционально-дифференцируимцие преобразователи 13 и 14, пропорциональные преобразователи 15 и 16, пропорциональные регуляторы 17 и 18 Выходы первых сумматоров 3 и 4 подключены к положительным входам элементов 5 и 6 сравнения, выходы кото рых через регулятор тока подключены к одному входу вторых сумматоров 7 и 8, ылходы регуляторов 9 и 10 то ка через соответствующие пропорционально-дифференцирующие преобразова тели 13 и 14 подключены к одному из входов соответственно первого сумматора 4 второй сепаратной системы 2 управления и первого суммато ра 3 первой сепаратной системы 1 управления, входы пропорциональных преобразователей 15 и 16 и пропорциональных регуляторов 17 и 18 каждой сепаратной системы 1 и 2 управления объединены и подключены к выходам соответствукщих регуляторов 11 н 12 скорости, которые также подключены к одному из отрицательных входов соответствующих элементов 5 и 6 сравнения, выходы соответствующих пропорциональных преобразователей 15 и 16 подключены к другим отрицательным входам соответствующих- элементов 3 и 6 срав- 5 нения, выходы пропорциональных регуляторов 17 и 18 подключены к одним из входов соответственно первого сумматора второй сепаратной системы 2 управления и первого сумматора 3 первой сепаратной системы 1 у пр зрения. Многодвигательный электропривод работает следуюпщм образом. При появлении в процессе работы привода рассогласования в моментах (/3(, ) развиваемых двигателями Первой и второй сепаратных систем управления, на их положительных входах действуют выходные сигналы пропорциональнодифференцирукацих преобразователей 14 и 13 соответственно, которые уменьшают входной сигнал той сепаратной cHCTeNBi, двигатели которой развивают большой момент и увеличивают входной сигнал той системы, двигатели которой развивают меньший момент, т.е. происходит выравнивание моментов, развиваемых двигателями разных сепаратных систем управления. При работе многодвигательного электропривода возможно вращение приводных двига;телей разных сепаратных систем i и 2 с разной скоростью. В этом случае на положительных входах первых 3 и 4 сумматоров и на отрицательных входах элементов 5 и 6 сравнения действуют соответственно сигналы результата сравнения выходных сигналов пропорциональных регуляторов 18 и 17 и пропорциональных преобразователей 15 и 16, причем эти сигналы результата сравнения уменьшают входной сигнал аепаратной системы управления, двигатели которой вращаются быстрее, что приводит к уменг шению тока (момента) этих двигателей и, одновременно, указанные сигналы увеличивают входные сигналы и токи (моменты) двигателей сепаратной системы, двигатели которой вращаются медленнее, т.е. происходит выравнивание мощностей создавае Ф1х двигателями разных сепаратных систем 1 и 2 управления. Принцип выравнивания мощностей развиваемых двигателями разных сепаратных систем 1 и 2 управления проще всего рассмотреть на примере. Для этого параметры пропорциональнодифференцирующих преобразователей 13 и 14 пропорциональных регулято- 31 ров 17 и 18 и пропорциональных преоб разователей 15 и 16 должны быть из условия обеспечения равенства мопг ностей Р и Р развиваемых двигателями разных сепаратных систем 1 и 2 управления, PI Р. где Р i Определим величиныu(jJ , /atUj и 4/i, Выражение для матричных передаточных функций звеньев функциональной струн турной схемы двумерной системы авто- матиче с ко го управлениямногодш1гаг« тельного электропривода (фиг.2) в обозначениях фиг.) можно предста- вить следующим образом II-R-II . Ы|«(р|« (P) о IKII о УР) . II О Н{р) 1ЬНГ11-.--1Г11) 1Г11 -iH Но ill I11011 Но ill г.РЦ , (Й-1И(Р) W(P)I| iUlh llw/(p)-w(p)llМатричная структурная схема (фиг.2) описывается следукицими уравнениями w c(FifitZ) ;(Z) (B)i . ( P( Н , (M-fN), Разрешая эти уравнения относитель но векторов С5 и Д при X О получим их матрицы в виде 4W Ы Ли), 5 Тогда, подставляя в (l) значения dWidUJ и й(л(2кз (4) и (5) получим W (р) - . (6) Н (p).R (р)- 1 В случае, если передаточная фунр- ция контура тока и регулятора скорости сепаратных систем 1 и 2 управления может быть представлена апериодическим звеном первого порядка К Н (р) --т , а передаточная функ1 р +1 ция пропорционально-дифференцирукт. щих преобразователей 13 и 14 R(p) К (Тр+1), то передаточные функции пропорциональных регуляторов 17 и 18 и пропорциональных преобразователей 15 и 16 являются пропорцио- нальными звеньями W(p) (при KK,7l). й 1ражение (6) не зависит от величины возмущаницего воздействия f (от загрузки механической части) и от соотношения L(p) и ) (от соотношения скоростей вращения двигателей разных сепаратных систем управления). Поэтому, использование предлагаемого способа управления многодвигательным электроприводом расширяет функциональные возможности таких приводов так как электропривод обеспечивает одинаковую загрузку двигателей в режиме любой загрузки механинической части не- зависимо от величины отклонения скоростей вращения двигателей раз- wax. сепаратных систем управления.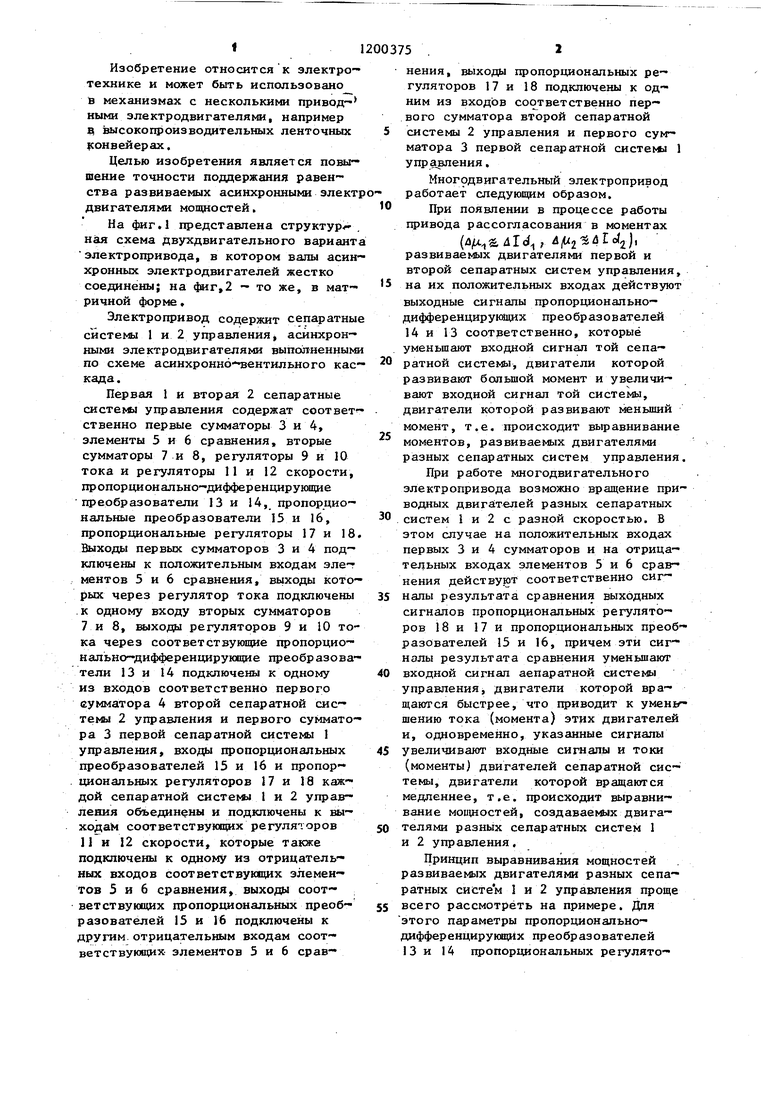
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления многодвигательным электроприводом | 1984 |
|
SU1259464A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Способ управления многодвигательным электроприводом | 1987 |
|
SU1450066A1 |
| Асинхронный вентильный каскад | 1991 |
|
SU1836801A3 |
| Многодвигательный электропривод | 1980 |
|
SU983961A1 |
| Электропривод переменного тока | 1986 |
|
SU1379933A2 |
| Способ управления асинхронновентильным каскадом | 1975 |
|
SU604115A1 |
| Способ эксплуатации в синхронном режиме частотно-регулируемых асинхронных двигателей с фазным ротором | 2018 |
|
RU2694892C1 |
| Многодвигательный частотнорегулируемый электропривод | 1978 |
|
SU748767A1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
СПОСОБ УПРАВЛЕНИЯ МНОГОДШГАТЕЛЬНУМ ЭЛЕКТРОПРИВОДОМ переменного тока, выполненным на базе п асинхронно-вентильных каскадов, в котором измеряют скорости вращения и фазные токи роторных цепей аси1Г хронных электродвигателей, преобразуют их в напряжения, пропорциональные скорости вращения к фазному току, и подают их на управляющие входы соответствующего асинхронновентильного каскада, отличающийся тем, что, с цепью повышения точности поддержания равенства развиваемых асинхронными электродвигателями мощностей, независимо от величины загрузки механической части привода, для каждого асинхронно-вентильного каскада, напряжение пропорциональное скорости вращения асинхронного электродвигателя собственного асинхронно-вентильного каскада сравнивают i суммой анало гичных напряжений остальных п 1 i асинхронно-вентильных каскадов, результирукицее напряжение суммируют (Л с напряжением, пропорционапьным сумме напряжений п - 1 асинхронновентильных каскадов, пропорциональньт фазным токам, роторных цепей асинхронных электродвигателей и их производных . ьо
| Способ выравнивания токов нагрузки двигателей постоянного тока и устройство для его осуществления | 1972 |
|
SU601795A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Наэаренко В.М | |||
| Известия ВУЗов | |||
| Горный журнал, 1974, № 4, с.158-163. | |||
