Изобретение относится к судостроению, в частности к судовым спуско-гюдъемным устройствам (СПУ) для спуска на воду и подъема с воды катеров и других объектов.
Целью изобретения является упрощение конструкции устройства.
На фиг. 1 схематически показано спуско- подъемное устройство с выведенным из работы устройством ограничения продольного раскачивания в момент застрогювки объекся на травление, канаты 8 своими свободными концами с помощью скоб закрепляются на подъемных щтоках, установленных на объекте 11. После этого лебедки 7 включаются на выбирание, а канаты 8 получают натяжение. При достижении заданного усилия натяжение канатов 8 лебедки 7 входит в автоматический режим слежения за объектом на волне. Включаются на травление грузовые лебедки 4 и подъемные блоки 5
та; на фиг. 2 - то же, с введенным в рабо- ю опускаются по канатам 8, автоматические
ту устройством ограничения продольного раскачивания после застроповки объекта.
Спуско-подъемное устройство содержит выносную несущую конструкцию 1, передвижение которой за борт и обратно осуществляется с помощью механизма выдвижения (не показан). Грузовой механизм включает в себя грузовые канаты 2, проходящие через систему блоков 3, закрепленные одним своим концом на судовой конструкции, а
захваты 6 захватывают подъемные щтоки объекта 11.
В процессе начальной стадии спуско- подъема (застроповки объекта) подвижные блоки 10 разведены в крайние положения (фиг. 1) и канаты 8 проходят к объекту вертикально, без излома на подвижных блоках 10.
После застроповки объекта грузовые лебедки 4 включаются на подъем, а подвижвторым - на барабане грузовых лебедок 4. 20 ьш блоки 10 с помощью привода по направНа грузовых канатах 2 подвещена подвеска с подъемными блоками 5 с закрепленными на них захватами 6. В состав СПУ входят также две автоматические следящие лебедки 7, на барабанах которых закреплены одляющим 12 перемещаются к середине выносной несущей конструкции. За время выхода объекта из воды подвижные блоки 10 устанавливаются в рабочем положении у середины несущей конструкции (фиг. 2), при
который увеличивается по мере подъема объекта 11. После выхода объекта из воды его раскачивание в продольной плоскости ограничивается за счет разности натяжения
ним концом канаты 8. Канаты 8 пропущены этом канаты 8 образуют между собой угол,
через систему блоков 9, подвижные блоки 10,
подъемные блоки 5, захваты 6 и на втором
конце имеют скобу для соединения со щтоком объекта 11. Подвижные блоки могут
перемещаться по горизонтальным направ- в канатах 8 при работе лебедок 7 на травляющим 12 с помощью привода, которыйление и при выбирании слабины.
состоит из электродвигателя 13, редуктораИспользование предлагаемого изобрете14 и ходового винта 15 с гайкой.ния позволит упростить конструкцию СПУ,
Устройство работает следующим обра-снизить его массу и стоимость,так как отпазом.дает необходимость в установке сложных.
Выносная несущая конструкция 1 выдви-35 дорогостоящих авто.матических лебедок и
гается за борт судна, как показано натрособлочной системы специально для ографиг. 1. Автоматические лебедки 7 включают-ничения продольного раскачивания объекта.
ся на травление, канаты 8 своими свободными концами с помощью скоб закрепляются на подъемных щтоках, установленных на объекте 11. После этого лебедки 7 включаются на выбирание, а канаты 8 получают натяжение. При достижении заданного усилия натяжение канатов 8 лебедки 7 входит в автоматический режим слежения за объектом на волне. Включаются на травление грузовые лебедки 4 и подъемные блоки 5
захваты 6 захватывают подъемные щтоки объекта 11.
В процессе начальной стадии спуско- подъема (застроповки объекта) подвижные блоки 10 разведены в крайние положения (фиг. 1) и канаты 8 проходят к объекту вертикально, без излома на подвижных блоках 10.
После застроповки объекта грузовые лебедки 4 включаются на подъем, а подвижляющим 12 перемещаются к середине выносной несущей конструкции. За время выхода объекта из воды подвижные блоки 10 устанавливаются в рабочем положении у середины несущей конструкции (фиг. 2), при
этом канаты 8 образуют между собой угол,
который увеличивается по мере подъема объекта 11. После выхода объекта из воды его раскачивание в продольной плоскости ограничивается за счет разности натяжения
у и г 2
ВНИИПИ Заказ 5181/17Тираж 422 Подписное
Фи.пиал ППП «Патент, г. Ужгород, ул. Проектная, 4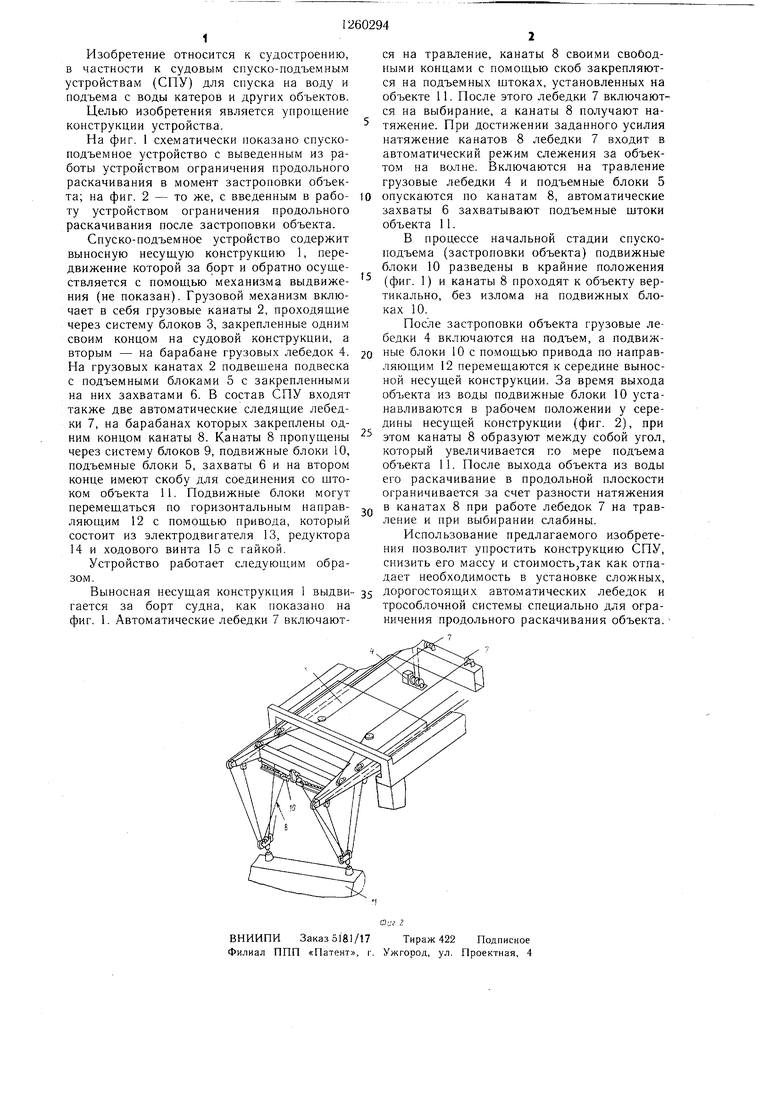
| название | год | авторы | номер документа |
|---|---|---|---|
| Судовое спускоподъемное устройство | 1986 |
|
SU1400945A1 |
| Устройство для спуска и подъема большегрузных катеров и других плавающих объектов | 1972 |
|
SU500114A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2556135C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2556041C1 |
| Судовое устройство для спуска и подъема плавсредств | 1990 |
|
SU1791272A1 |
| Спуско-подъемное устройство для подъема плавсредств на волнении | 1976 |
|
SU652034A1 |
| ТРАВЕРСА СПУСКО-ПОДЪЕМНОГО УСТРОЙСТВА | 2015 |
|
RU2616452C2 |
| Спуско-подъемное устройство | 2018 |
|
RU2735444C2 |
| Судовое спуско-подъемное устройство | 1983 |
|
SU1110715A1 |
| Спуско-подъемное устройство для плавсредств | 1977 |
|
SU679482A1 |

| Судовое спуско-подъемное устройство | 1973 |
|
SU486948A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
