Изобретение относится к транспортным средствам и может быть использовано в конвейерных системах для передачи штучных изделий с конвейера на конвейер в помещениях разного уровня неодинаковой категории взрывопожароопасности.
Целью изобретения является расширение функциональных возможностей.
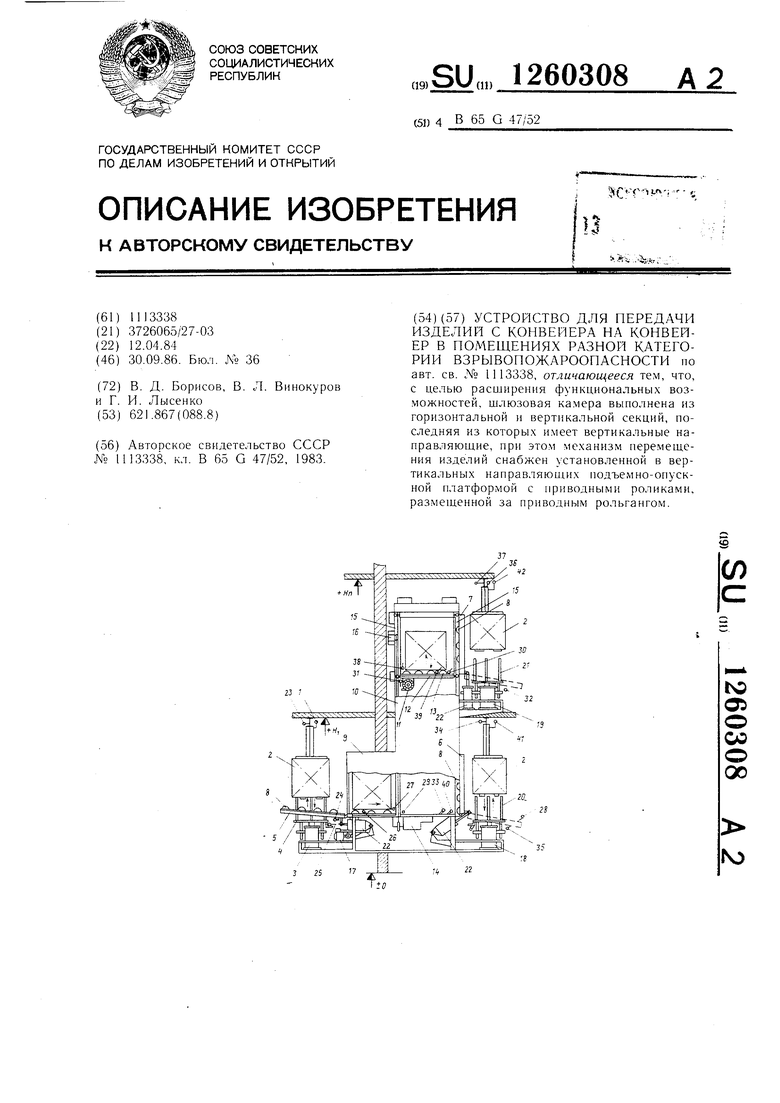
На чертеже схематически изображено предлагаемое устройство, вид сбоку.
ванием двери 6 и остановом привода 14 по сигналу датчика 28.
При горизонтально-вертикальном грузопотоке изделие 2 после прохождения горизонтальной секции 9 шлюзовой камеры перемещается на подъемно-опускную платформу 12, срабатывает датчик 29. По его сигналу отключается электропривод 17 рольганга 11 и изделие останавливается на роликах 13 подъемно-опускной платформы
Устройство содержит конвейерную под- ю 12, после чего по сигналу датчика 30 вклювеску 1 вильчатого типа для изделия 2, подъемно-опускное приспособление 3 с вилкой 4, входную 5 и выходные двери 6 и. 7 с роликами 8, обеспечивающими проход вилок, горизонтальную 9 и вертикальную
чается лифтовый механизм 16 и платформа 12 по вертикальным направляющим 15 перемещается с изделием 2 вверх. При подходе платформы к заданному вертикальному уровню срабатывает датчик 31, по сигналам ко,.-,10 секции шлюзовой камеры, приводной - торого лифтовой механизм 16 останавли- рольганг 11 горизонтальной секции, подъ-вает платформу 12, открываются выходные
емно-опускную платформу 12 вертикальной двери 7 вертикальной секции шлюза и вклю секции с приводными роликами 13 и меха-чается механизм 14 привода роликов 13
низмом 14 привода, вертикальные направ- платформы 12. Перегружаемое изделие ляющие 15, лифтовой механизм 16, элект- 20 перемещается на ролики 8 выходной двери 7 и с помопхью вилки 21 подъемно- опускного приспособления 19 передается на конвейерную подвеску в помещение друропривод 17 рольганга горизонтальной секции шлюзовой камеры, подъемно-опускные приспособления 18 и 19 выходных дверей с вилками 20 и 21.
Двери 5-7 установлены с возможностью
гон категории взрывопожароопасности. При этом срабатывает датчик 32, от сигнаклона в плоскости перемещения изде- 25 нала которого выходная дверь 7 закрывалия от приводов в виде пневмоцилиндров 22. Система датчиков 23-40 обеспечивает конструктивную взаимосвязь элементов устройства, а конвейерные подвески 41 и 42 обеспечивают транспортировку изделий в помещениях.
Устройство работает следующим образом.
При подходе конвейерной подвески 1 с изделием 2 к устройству датчиками 23-
ется и подъемно-опускная платформа 12 возвращается в крайнее нижнее положение. Останов работы лифтового механизма 16 осуществляется от датчика 33.
На этом цикл перегрузки изделия по горизонтально-вертикальному варианту грузопотока заканчивается.
Для вариантов грузопотоков в вертикальном и реверсивно-вертикальном на- 25 последовательно подается сигнал на 35 правлениях вертикальная секция работает открывание входной двери 5, подъем и опус- независимо от горизонтальной следующим кание вилки 4 подъемно-опускного приспособления 3. Изделие по роликам 8 перемещается под воздействием собственного веса на приводной рольганг 11 горизонта.ть- ной секции 9 шлюзовой камеры, при этом датчик 26 включает электропривод 17. После прохождения горизонтальной секции шлюзовой камеры, изделие в зависимости от требований технологического процесса.
40
образом. При подходе конвейерной подвески 41 с изделием 2 к устройству датчиками 34 и 35 подается сигнал на открывание двери в вертикальной секции 10 шлюза на угол, обеспечивающий перемещение изделия 2 по роликам 8 под воздействием собственного веса, подъем и опускание вилки 20 подъемно-опускным приспособлением
18. После установки изделия 2 на роликах
может быть перегружено на конвейер в по- 13 подъемно-опускной платформы 12 по
сигналу датчика 30 включается лифтовый механизм 16 и платформа 12 по вертикаль- ны.м направляющим 15 перемещается с изделием вверх. При подходе платформы к замещение другой категории взрывопожароопасности.
данному вертикальному уровню срабатываПри горизонтальном грузопотоке датчик 27 выдает сигнал на включение механизма 14 привода роликов 13 платформы 50 ет датчик 31, по сигналу которого лифто- 12, отключение электропривода 17 роль- вой механизм 16 останавливает платфор- ганга 11 и открывание выходной двери 6 вертикальной секции шлюза. Пикл перегрузки заканчивается выдачей изделий с роликов 8 выходной двери 6 вилкой 20 подъемно-опускного приспособления 18 на кон-
вейерную подвеску 41 в помещение другой категории взрывопожароопасности, закрыму 12, происходит открывание выходной двери 7 вертикальной секции шлюза и включение механизма 14 привода роликов 13 платформы 12.
Изделие перемещается на ролики 8 выходной двери 7 и с помощью вилки 21 подъемно-опускного приспособления 19 переванием двери 6 и остановом привода 14 по сигналу датчика 28.
При горизонтально-вертикальном грузопотоке изделие 2 после прохождения горизонтальной секции 9 шлюзовой камеры перемещается на подъемно-опускную платформу 12, срабатывает датчик 29. По его сигналу отключается электропривод 17 рольганга 11 и изделие останавливается на роликах 13 подъемно-опускной платформы
12, после чего по сигналу датчика 30 вклю12, после чего по сигналу датчика 30 включается лифтовый механизм 16 и платформа 12 по вертикальным направляющим 15 перемещается с изделием 2 вверх. При подходе платформы к заданному вертикальному уровню срабатывает датчик 31, по сигналам ко-1.-,торого лифтовой механизм 16 останавли- вает платформу 12, открываются выходные
гон категории взрывопожароопасности. При этом срабатывает датчик 32, от сигнала которого выходная дверь 7 закрывается и подъемно-опускная платформа 12 возвращается в крайнее нижнее положение. Останов работы лифтового механизма 16 осуществляется от датчика 33.
На этом цикл перегрузки изделия по горизонтально-вертикальному варианту грузопотока заканчивается.
Для вариантов грузопотоков в вертикальном и реверсивно-вертикальном на- правлениях вертикальная секция работает независимо от горизонтальной следующим
образом. При подходе конвейерной подвески 41 с изделием 2 к устройству датчиками 34 и 35 подается сигнал на открывание двери в вертикальной секции 10 шлюза на угол, обеспечивающий перемещение изделия 2 по роликам 8 под воздействием собственного веса, подъем и опускание вилки 20 подъемно-опускным приспособлением
данному вертикальному уровню срабатыва ет датчик 31, по сигналу которого лифто- вой механизм 16 останавливает платфор-
ет датчик 31, по сигналу которого лифто- вой механизм 16 останавливает платфор-
му 12, происходит открывание выходной двери 7 вертикальной секции шлюза и включение механизма 14 привода роликов 13 платформы 12.
Изделие перемещается на ролики 8 выходной двери 7 и с помощью вилки 21 подъемно-опускного приспособления 19 передается на конвейерную подвеску в помещение другой категории взрывопожароопас- ности. При этом срабатывает датчик 32, от сигнала которого выходная дверь 7 закрывается и подъемно-опускная платформа 12 возвращается в крайнее нижнее положение. Останов работы лифтового механизма 16 осуществляется от датчика 33. На этом цикл перегрузки изделия по вертикальному варианту грузопотока заканчивается.
При перегрузке в реверсивно-вертикаль- ном направлении изделие 2 перемещается на конвейерной подвеске 42 к двери 7 вертикальной секции 10 шлюза и последовательна угол, обеспечивающий перемещение изделия 2 по роликам 8 под воздействием собственного веса, подъем и опускание вилки 21 подъемно-опускным приспособлением 19.
5 После установки изделия 2 на роликах 13 подъемно-опускной платформы 12 по сигналу датчика 39 закрываются двери 7 вертикальной секции шлюза 11, включается лифтовый механизм 16. Платформа 12 с
10 изделием 2 перемещается вниз.
При подходе платформы 12 к крайнему нижнему положению, срабатывает датчик 40, по сигналу которого лифтовый механизм 16 останавливает платформу 12, происходит включение механизма 14 привода
но воздействует на датчики 36 и 37. От роликов 13 платформы 12 и открывание датчика 36 выдается сигнал на блокировку датчика 31 и включение в работу лифтового механизма 16.
Подъемно-опускная платформа 12 перевыходной двери 6 вертикальной секции щлюза. Цикл перегр(узки в вертикально- реверсивном направлении заканчивается выдачей изделия с роликов 8 выходной двемещается вверх. При подходе платформы к 20 Р вилкой 20 подъемно-опускного призаданному вертикальному уровню срабатывает датчик 38 и лифтовый механизм 16 останавливает платформу 12. Затем от датчика 37 подается на открывание двери 7 вертикальной секции 10 шлюза
способления 18 на конвейерную подвеску 41 в помещение другой категории взрыво- пожароопасности, закрыванием двери 6 и останово.м привода 14 по сигналу датчика 28.
на угол, обеспечивающий перемещение изделия 2 по роликам 8 под воздействием собственного веса, подъем и опускание вилки 21 подъемно-опускным приспособлением 19.
После установки изделия 2 на роликах 13 подъемно-опускной платформы 12 по сигналу датчика 39 закрываются двери 7 вертикальной секции шлюза 11, включается лифтовый механизм 16. Платформа 12 с
изделием 2 перемещается вниз.
При подходе платформы 12 к крайнему нижнему положению, срабатывает датчик 40, по сигналу которого лифтовый механизм 16 останавливает платформу 12, происходит включение механизма 14 привода
роликов 13 платформы 12 и открывание
роликов 13 платформы 12 и открывание
выходной двери 6 вертикальной секции щлюза. Цикл перегр(узки в вертикально- реверсивном направлении заканчивается выдачей изделия с роликов 8 выходной две Р вилкой 20 подъемно-опускного приспособления 18 на конвейерную подвеску 41 в помещение другой категории взрыво- пожароопасности, закрыванием двери 6 и останово.м привода 14 по сигналу датчика 28.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи изделий с конвейера на конвейер в помещениях разной категории взрывопожароопасности | 1983 |
|
SU1113338A1 |
| Устройство для передачи изделий в помещении разной категории взрывопожароопасности | 1985 |
|
SU1288137A1 |
| Транспортно-технологическое устройство для помещений различной категории взрывопожароопасности | 1986 |
|
SU1407891A1 |
| Устройство для передачи изделий с одного конвейера на другой | 1983 |
|
SU1133193A1 |
| Конвейерная система для транспортировки изделий | 1977 |
|
SU747791A1 |
| Секционный конвейер транспортно-накопительной системы | 1989 |
|
SU1691238A1 |
| Устройство для передачи штучных грузов с одного конвейера на другой | 1981 |
|
SU988709A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2019 |
|
RU2742099C2 |
| Поточная линия для окрашивания изделий | 1985 |
|
SU1328270A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 1993 |
|
RU2086481C1 |
| Устройство для передачи изделий с конвейера на конвейер в помещениях разной категории взрывопожароопасности | 1983 |
|
SU1113338A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
