(54) УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ШТУЧНЫХ ГРУЗОВ С ОДНОГО
КОНВЕЙЕРА НА ДРУГОЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки люлек подвесного конвейера | 1986 |
|
SU1426899A1 |
| Перегрузочное устройство подвесного конвейера | 1982 |
|
SU1084211A1 |
| Подъемно-перегрузочное устройство для штучных грузов | 1981 |
|
SU988716A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Устройство для перемещения и передачи штучных грузов | 1988 |
|
SU1606408A1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Устройство для укладски штучных грузов | 1971 |
|
SU358920A1 |
| Перегрузочное устройство для штучных грузов | 1980 |
|
SU937284A1 |
| Машина для укладки в пакет с перевязкой штучных грузов | 1959 |
|
SU130399A1 |
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
1
Изобретение относится к транспортному машииостроению и может быть использовано для механизации погрузочно-разгрузочных операций при внутрицеховой транспортировке изделий.;
Известно устройство для передачи штучных грузов с одного конвейера на другой, включающее в себя стол, одним краем шарнирно закрепленный на подъемно-опускной платформе с приводом вертикального перемещения, другим - свободно лежащий на опоре и взаимодействующий с внещним упором, установленным на пути движения стола в месте передачи груза 1.
Однако данное устройство не обеспечивает передачи штучных грузов между разновысокими транспортерами при разных направлениях грузопотоков, а также съем и навеску грузов на подвесной конвейер при фиксации груза на столе.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство для передачи штучных грузов с одного конвейера на другой, включающее стол с ограничителями, установленный на подъемно-опускной от привода вертикального перемещения платформе, и внешние упоры для наклона стола 2.
Недостатком этого устройства является то, что оно не обеспечивает перегрузку грузов между конвейерами, расположенными на разных уровнях и с двух сторон от платформы.
Цель изобретения - расширение технологических возможностей устройства.
Указанная цель достигается тем, что в устройстве, включающем стол с ограничи10телями, установленный на подъемно-опускной от привода вертикального перемещения платформе, и внешние упоры для наклона стола, платформа снабжена подвижными по вертикали скалками и шарнирно уста15 новленными на ней двуплечими рычагами, одни концы которых шарнирно соединены со скалками, а другие установлены с возможностью взаимодействия с внешними упорами, при этом стол шарнирно соединен с одной из скалок, а внещние упоры вы20полнены с возможиостью выдвижения.
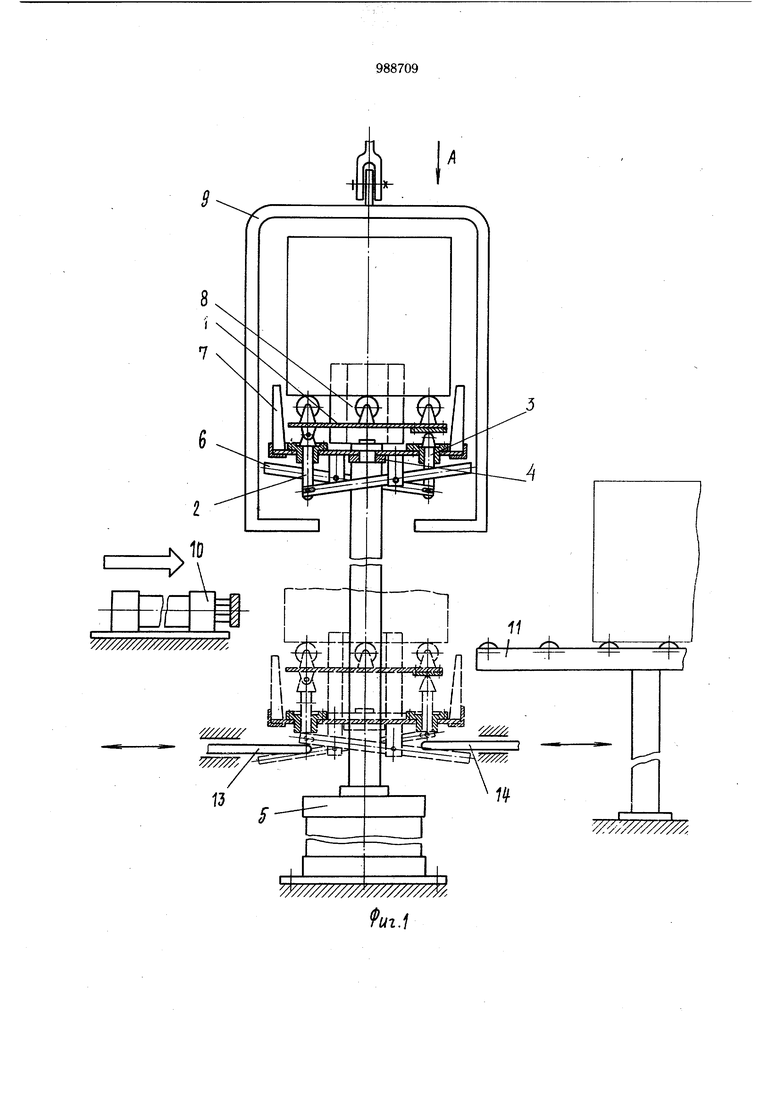
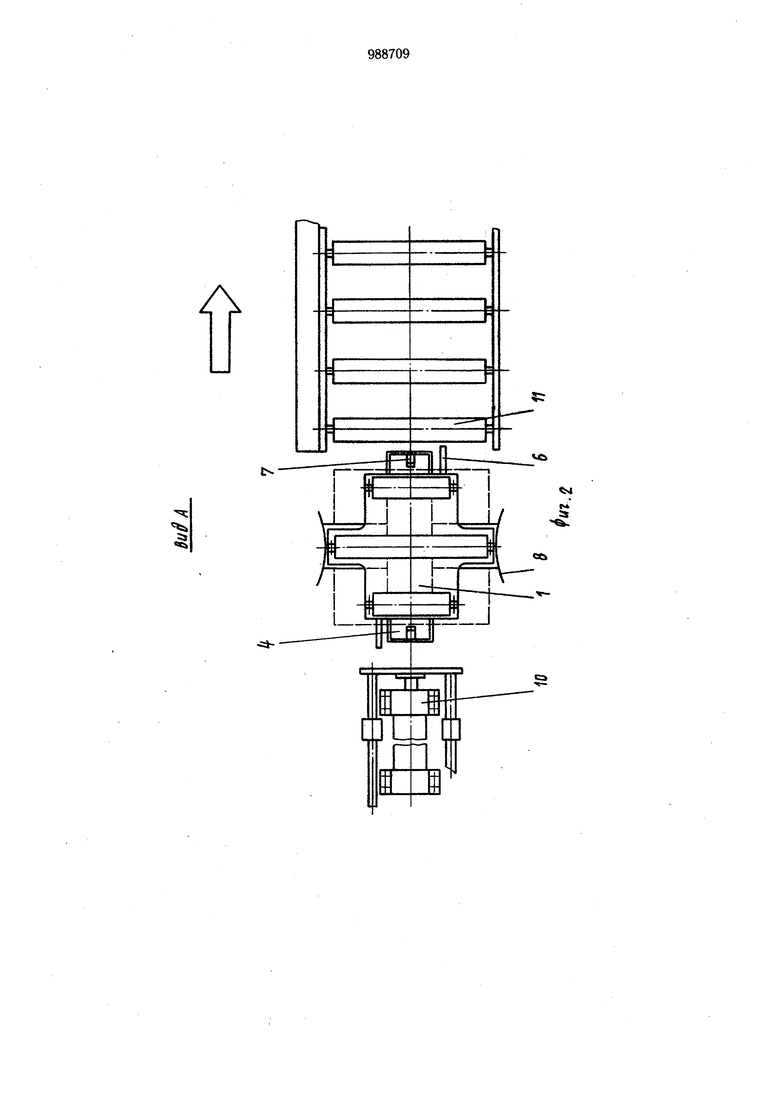
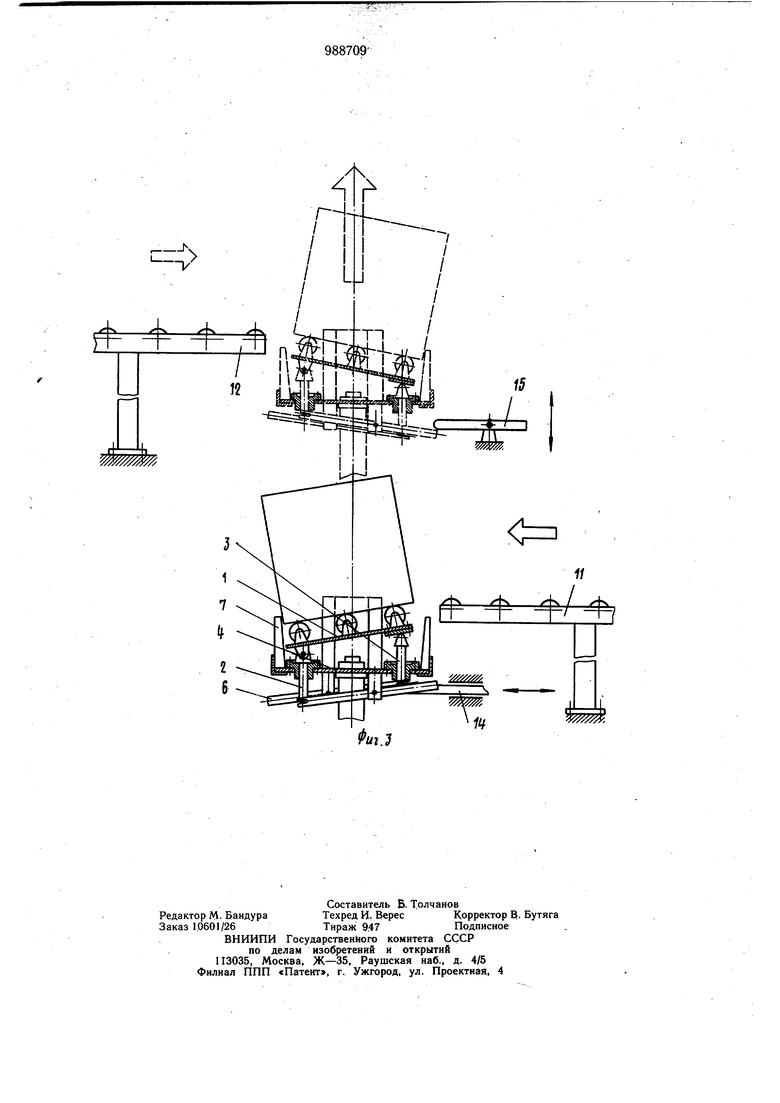
На фиг. 1 изображено перегрузочное устройство, расположенное между напольным транспортером и подвесным конвейером; на фиг. 2 - вид А на фиг. I; на фиг. 3 -
перегрузочное устройство, расположенное между разновысокими транспортерами и подвесным конвейером (последний условно не показан).
Перегрузочное устройство для передачи штучных грузов с одного конвейера на другой содержит стол 1, шарнирно закрепленный на скалке 2 и свободно лежаШи.й на оголовке скалки 3. Скалки 2 и 3 выполнены подвижными по вертикали, расположены в направляющих подъемно-опускной платформы 4, соединенной с приводом, например, силовым цилиндром 5. Свободные концы скалок 2 и 3 шарнирно соединены с двуплечими рычагами 6, которые шарнирно закреплены на платформе 4. На платформе 4 жестко закреплены ограничители 7 и направляющие 8. Со столом 1 взаимодействуют подвесной конвейер 9, толкатель 10 и разновысокие транспортеры, например приводные роликовые конвейеры - нижний 11 и верхний 12. При этом рычаги 6 взаимодействуют с внешними управляемыми выдвижными упорами 13 и 14, расположенными в нижней позиции стола 1, и упором 15, расположенным у верхнего конвейера 12.
Толкатель 10 выполнен в виде планки, закрепленной на штоке силового цилиндра и снабженной скалками, расположенными в неподвижных направляющих.
Устройство работает следующим образом.
При включении силового цилиндра 5 поднимается платформа 4 с установленным на ней столом 1 и снимает груз с подвески подвесного конвейера 9. Груз охватывается ограничителями и направляющими 8. Форма стола 1 и платформы 4 позволяет им пройти между опорными поверхностями подвески. После этого платформа 4 со столом 1 и с грузом приходит в нижнее положение (см. фиг. 1). Поскольку внешние управляемые упоры 13 и 14 выдвинуты, скалки 2 и 3, наезжая на них, поднимают стол 1 с грузом, освббождая от воздействия ограничителей 7. Срабатывает толкатель 10 и перемещает груз, расположенный между направляющими 8, на приводной роликовый конвейер 11.
Для навески груза на подвесной конвейер 9 .стол 1 принимает груз с нижнего конвейера 11 или верхнего - 12. Для этого в нижнем положении выдвигается только один упор 14 и стол 1 занимает наклонное положение. Груз с конвейера 11 скатывается на стол 1 между направляющими 8 до ограничителя 7. При подъеме стол 1 выравнивается, и груз охватывается ограничителями 7 с обеих сторон. Упор 15 при этом отведен. Когда же груз принимается с верхнего конвейера 12, упор 15 переводится в рабочее положение и, взаимодействуя с ним, двуплечий рычаг б перемещает скалку 2 вверх, отчего стол 1 занимает наклонное положение и принимает груз с конвейера 12. После этого упор 15 отводится и скалка 2 опускается, выравнивая стол 1 с грузом.
Для подачи груза на конвейер 12 симметрично упору 15 устанавливается такой же упор, а против конвейера 12 крепится толкатель. Перегрузка осуществляется аналогично тому, как показано на фиг. 1.
Положение подвесок, стола и внешних упоров контролируется датчиками (не показаны).
Таким образом, предлагаемая конструкция позволяет механизировать и автоматизировать перегрузку щтучных грузов при разных направлениях грузопотоков между разновысокими транспортерами и подвесным конвейером с фиксацией груза на столе. При этом повышается безопасность и культура производства.
Формула изобретения
Устройство для передачи щтучных грузов с одного конвейера на другой, включающее стол с ограничителями, установленный на подъемно-опускной от привода вертикального перемещения платформе, и внещние упоры для наклона стола, отличающееся тем, что, с целью расщирения технологических возможностей устройства, платформа снабжена подвижными по вертикали скалками и щарнирно установленными на ней двуплечими рычагами, одни концы которых щарнирно соединены со скалками, а другие установлены с возможностью взаимодействия с внещними упорами, при этом стол щарнирно соединен с одной из скалок, а внещние упоры выполнены с возможностью выдвижения.
Источники информации, принятые во внимание при экспертизе
№ 87573, кл. В 65 G 47/34, 1949 (прототип). % ;%%%; й ///////////////////yzy/, . Ь МЖл Г . fui.l
А
«
ы
14
at
