Известные трюмные шагающие погрузчики с эластичными опорами, с телескопической поворотной вокруг нертикальной оси стрелой с подвешенным к ней поворотным вйлоч ным захватом «е имеют постоянного угла наклона вилок и не обеспечивают захвата поддона вилками.
В описываемом трюмном погрузчике этот недостаток устранен тем, что вилочный захват подвешен на шарнирном параллелограмме, одна сторона которого сделана телескопической.
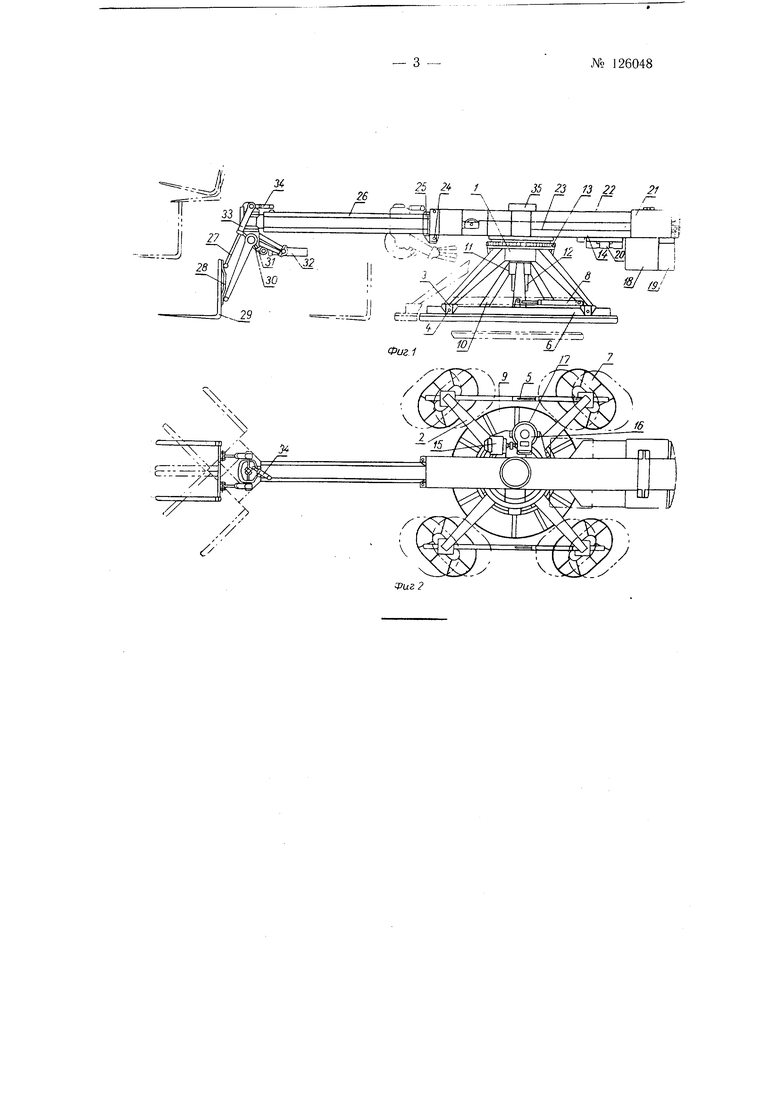
На фиг. 1 изображен погрузчик, вид сбоку; на фиг. 2 - то же, в плане.
Портал предстанляет собой сварную конструкцию в виде опорного кольца / и четырех наклонных ног 2, на концах которых крепятся плиты 3 со смонтированными на них соосными катками 4, опирающимися на лыжи 5. Лыжи 5 состоят из горизонтальпых двутавровых бало:к 6, опирающихся по концам на плоские опорные башмаки 7, обшитые снизу губчатой резиной (латекс) и обеспечивающие минимальные удельные давления на опорную поверхность и устойчивость при всех положениях и нагрузках стрелы.
Взаимное перемещение портала и лыж 5 осуществляется гидроподъемником 8. В центре портала расположена обшитая снизу латексом круглая опора 9 с вынесенной вверх на кронштейнах 10 втулкой //, которая перемещается по центральной напранляющей колонне 12, и расположенным внутри нее гидроцилиндром.
На опорном кольце / портала смонтирован пеподвил но зубчатый венец (наружное кольцо) 13 радиально-опорного трехкольцевого подшипника, внутреннее кольцо которого крепится к центральной колонне 12, а среднее-к задней части стрелы 14 коробчатого сечения, на которой смонтирован электродвигатель 15 с редуктором 16, шестерня 17 которого входит в зацепление с зубчатым венцом 13- Сзади установлен маслобак 18, Е который вмонтированы электродвигатель с насосом,
Л 126048
шкаф с электрооборудованием 19, золотники 20, управляющие всеми гидравлическими цилиндрами, и противовес 21, обеспечивающий устойчивость машииы и перемещающийся на роликах по направляющим 22. Перемещение противовеса осуществляется полиспастом 23 с прИЕОх1,ом от выдвил иой части стрелы.
Впереди кориевой части стрелы размещены горизонтальные 24 и верти1кальные 25 ролики, по которым перемещается выдвижная часть стрелы 26. Изменение .вылета /стрелы производится гидравлическим цилиндром телескопической конструкции (на чертеже «е показан). На внешнем конце выдвижной части стрелы установлен механизм подъема, поворота и наклона захватных вилок, представляющий собой щарнирный параллелограмм 27, передние шарииры которого закреплены на плите 28 с вилочным захватом 29, а задние - на поворотном кронщтейне 30. Нижние тяги состоят из двух угловых рычагов 31, поворачиваемых цилиндром подъема груза 32. Две верхние тяги сами являются цилиндрами 33 наклона вилок.
Исполнение механизма подъема в виде параллелограмма позволяет поднимать груз строго параллельно самому себе.
Кронштейн с этими механизмами поворач«вается относительно вертикальной оси вправо и влево с помощью цилиндра 34 поворота вилок. Питание машины произЕОДится от бортовой сети переменного тока- Токоподводящий кабель подключается к плоскому кольцевому токоприемнику 35, расположенному соосно с опорно-поворотным устройством.
Шагание машины производится следующим образом.
Машина поднимается на круглой опоре Я лыжи. 5 отрываются от пайола (или груза) и выносятся .вперед в направлении движения. Машина опускается на лыжи 5, а круглая опора 9 поднимается. Включаются гидроподъемники 8 лыж 5 и машина перемещается по двутавровым балкам 6 лыж на ход поршня гидроподъемника 8, т. е. делает шаг, затем движение повторяется в той же по-следовательности. При необходимО|Сти изменения направления движения машина, опираясь на круглую опору 9 электродвигателем 15, через редуктор 16 и зубчатый венец 13 поворачивается Е; нужном направлении, при этом стрела с помошдзю гидрозамка соединяется с круглой опорой 9. Когда лыжи опускаются на грунт, стрела при включении механизма поворота вращается в необходимом направлении.
Управление машиной дистанционное от переносного пультаПредмет изобретения
Трюмный шагающий погрузчик с эластичными опорами, с телескопической поворотной вокруг вертикальной оси стрелой, е подвещенным к ней поворотным вилочным захватом, отличающийся тем, нто в нем, с целью обеспечения постоянного угла наклона вдлок и уменьшения захвата поддона с грузом, вилочный захват подвешен на шарнирном параллелограмме, одна сторона которого сделана телескопичеекой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагания к трюмному погрузчику | 1960 |
|
SU145141A1 |
| Трюмный погрузчик с подрезиненной опорой | 1959 |
|
SU126047A1 |
| Автопогрузчик с вилочным захватом | 1952 |
|
SU105607A1 |
| Съемный к автопогрузчику вилочный захват-кантователь | 1960 |
|
SU137822A1 |
| Трюмный погрузчик | 1956 |
|
SU109132A1 |
| Колесный погрузчик-штабелер | 1969 |
|
SU454160A1 |
| ИНЖЕНЕРНАЯ ГУСЕНИЧНАЯ МАШИНА НА БАЗОВОМ ТАНКОВОМ ШАССИ | 2004 |
|
RU2283467C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 1995 |
|
RU2137701C1 |
| Передвижная мачта освещения телескопического типа | 2022 |
|
RU2795671C1 |
| УПРАВЛЕНИЕ ПОГРУЗОЧНО-РАЗГРУЗОЧНОЙ МАШИНОЙ | 2018 |
|
RU2756412C2 |