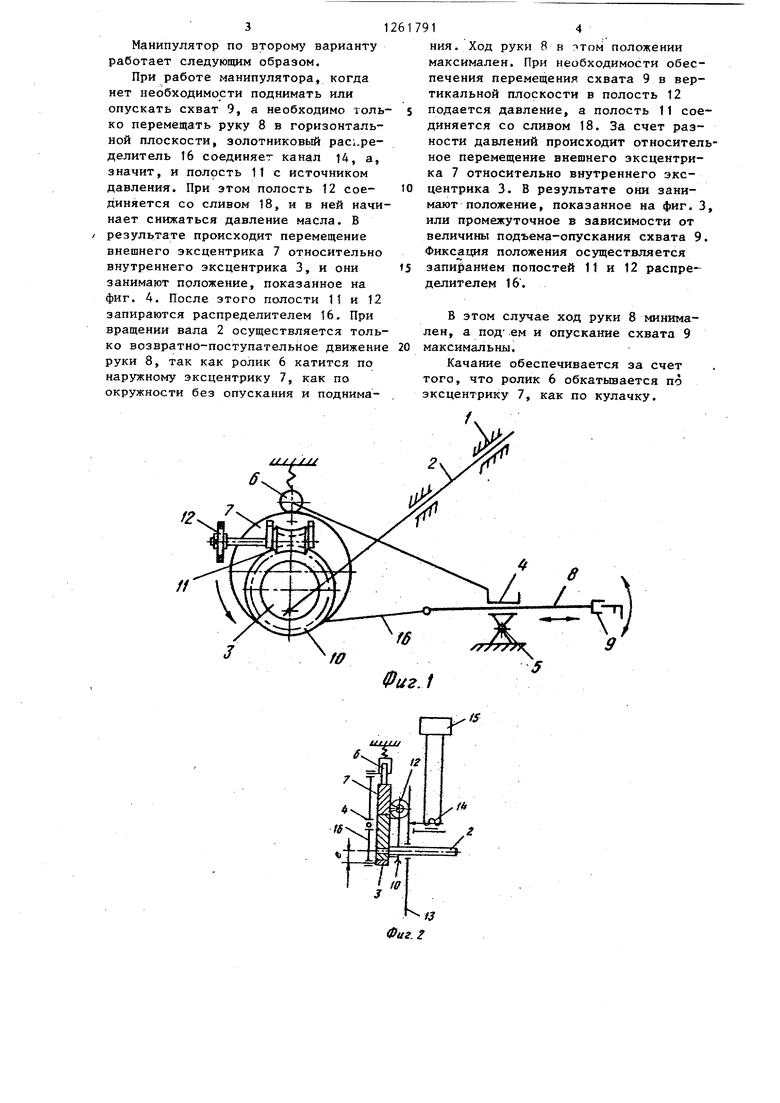
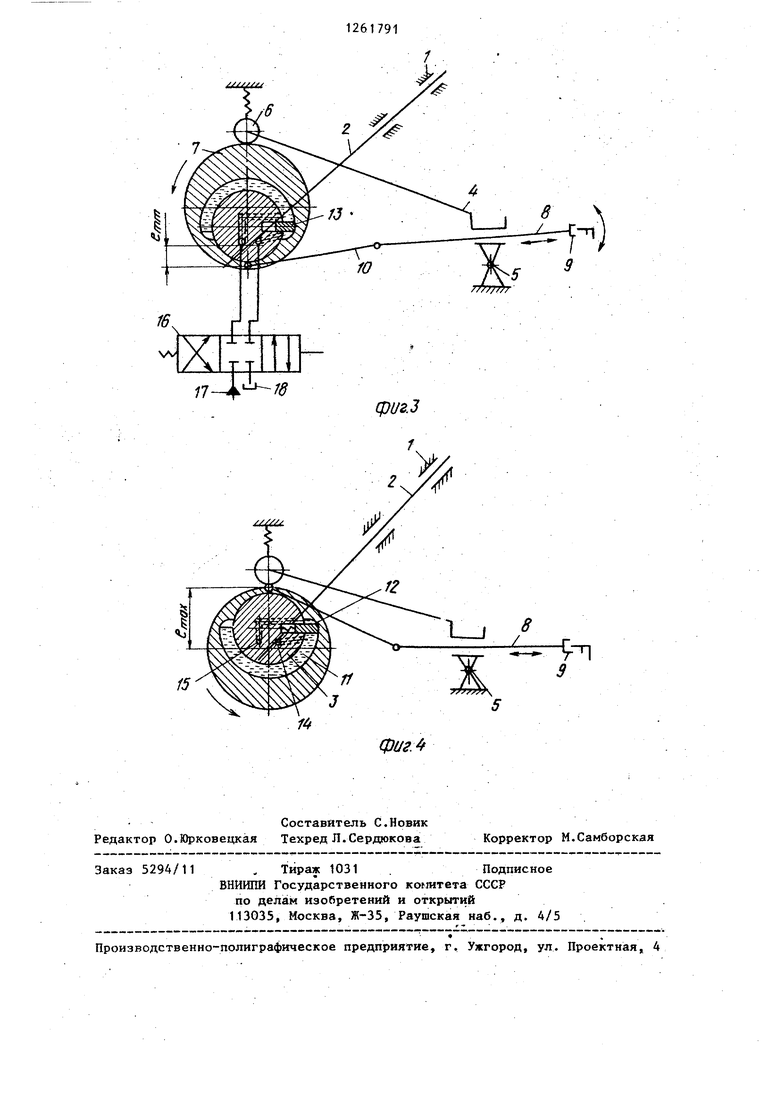
Изобретение относится к машиностроению и касается манипуляторов, преимущественно для использования в гаражном оборудовании и на авторемзаВодах. Целью изобретения является обеспечение бесступенчатого регулирования зоны обслуживания. На фиг. 1 приведена кинематическая схема манипулятора по первому варианту; на фиг. 2 - то же, вид сбоку; на фиг. 3 - кинематическая схема манипулятора по второму варианту сминимальным эксцентриситетом на фиг. 4 - то же с максимальным эксцентриситетом. Манипулятор состоит из основания 1, на котором установлен приводной вал 2 с жестко насаженным внутренним эксцентриком 3, стойки с направ ляющей 4, имеющей возможность поворота в вертикальной плоскости вокру оси 5, жестко соединенной с осью ролика 6, Постоянно контактирующего с внешним эксцентриком 7 кривошипно шатунного механизма, вьтолняющего роль кулачков, и смонтированной на направляющей 4 с возможностью перемещения механической руки 8 с расположенньм на ней схватом 9. Внутренний эксцентрик 3 неподвиж но соединен с червячным колесом 10 а внешний эксцентрик 7 - с червяком 11, который связан с роликом 12, взаимодействующим с фрикционным ди ком 13, соединенным с электромагнитом 14 программного устройства 15. Диск 13 может совершать возвратнопоступательное движение. С внешним эксцентриком 7 связан шатун 16, со диненньй с рукой 8. Манипулятор по первому варианту работает следующим образом. При вращении вала 2 крутящий момент с внутреннего эксцентрика 3 передается наружному эксцентрику 7 а дальше связанному с ним шатуну 16 и руке 8, которая перемещается к изделию.. , При этом эксцентрики 3 и 7 установлены в таком положении, при кото ром эксцентриситет (е) минимален. В этом случае ход руки 8 минимален Одновременно ролик 6, обкатываясь по наружному эксцентрику 7, опускается и, тем самым, поворачивает направляющую 4 вокруг оси 5, застав12яя приподняться схват на определенную величину. При дальнейшем вращении (более 90°) рука 8 перемещается в обратном направлении, а ролик 6 начинает приподниматься, заставляя схват 9. опускаться. Для изменения хода руки 8 и схвата 9 во время работы манипулятора (без остановки) срабатьшает программное устройство 15 и включает электромагнит 14, который прижимает диск 13 к фрикционног-гу ролику 12. Последний, обкатываясь по неподвижному диску 13, приводит в движение червячную передачу, что изменяет взаимное положение эксцентриков 3 и 7, плавно изменяя эксцентриситет кривошипно-шатунного механизма при необходимости до максимума. В результате шатун 16, а значит, и. рука 8 плавно изменяют ход и величину перемещения схвата 9 в вертикальной плоскости. Манипулятор по второму варианту состоит из основания 1, на котором установлен приводной вал 2 с жестко насаженным внутренним эксцентриком 3, стойки с направляющей 4, имеющей возможность поворота в вертикальной плоскости вокруг оси 5, жестко соединенной с осью ролика 6, постоянно контактирующего с внешним эксцентриком 7 кривошипно-шатунного механизма, выполняющего роль кулачк.а, и смонтированной на направляющей 4 с возможностью перемещения механической руки 8 с расположенным на ней схватом 9. Кроме того, имеется- моментный гидроцилиндр, вьшолненный в виде камеры, размещенной во внешнем эксцентрике 7, взаимодействующем с шатуном 10. Причем камера разделена на полости 11 и 12 пластиной 13, установленной во внутреннем эксцент рике 3. Полости 11 и 12 соединены соответственно каналами 14 и 15, выполненными во внутреннем эксцентрике 3, с управляемьм золотниковым распределителем 16. Последний соединен трубопроводом 17 с источником давления (не показан) и сливом 18. Управление золотниковым распределителем может осуществляться вручную или за счет сигнала от электронной системы управления. 3 Манипулятор по второму варианту работает следующим образом. При работе манипулятора, когда нет необходимости поднимать или опускать схват 9, а необходимо толь ко перемещать руку 8 в горизонтальной плоскости, золотниковый paci.peделитель 16 соединяет канал 14, а, значит, и полость 11 с источником давления. При этом полость 12 соединяется со сливом 18, и в ней начи нает снижаться давление масла. В результате происходит перемещение внешнего эксцентрика 7 относительно внутреннего эксцентрика 3, и они занимают положение, показанное на фиг. 4. После этого полости 11 и 12 запираются распределителем 16. При вращении вала 2 осуществляется толь ко возвратно-поступательное движени руки 8, так как ролик 6 катится по наружному эксцентрику 7, как по окружности без опускания и поднима14ния. Ход руки в в том положении максимален. При необходимости обеспечения перемещения схвата 9 в вертикальной плоскости в полость 12 подается давление, а полость 11 соединяется со сливом 18. За счет разности давлений происходит относительное перемещение внешнего эксцентрика 7 относительно внутреннего эксцентрика 3. В результате они занимают положение, показанное на фиг. 3, или промежуточное в зависимости от величины подъема-опускания схвата 9. Фиксация положения осуществляется запиранчем попостей 11 и 12 распределителем 16. В этом случае ход руки 8 минимален, а под- .ем и опускание схвата 9 максимальны. Качание обеспечивается за счет того, что ролик 6 обкатывается по эксцентрику 7, как по кулачку.
ff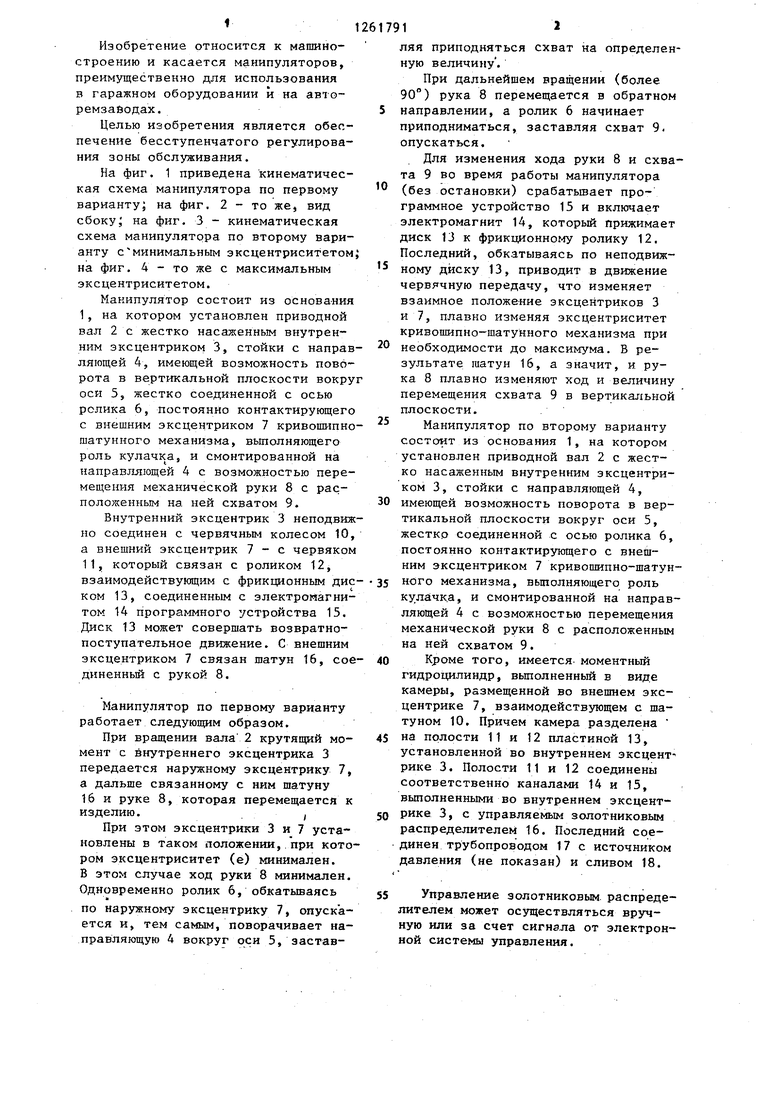
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1281400A1 |
| Стенд для испытания упругих элементов подвески транспортного средства | 1981 |
|
SU1040369A1 |
| Стенд для испытания сцепного устройства автомобиля | 1986 |
|
SU1493910A1 |
| Устройство для изменения хода поршня | 1981 |
|
SU985492A1 |
| Центробежный разбрасывающий орган | 1985 |
|
SU1294303A1 |
| ИМПУЛЬСНАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2000 |
|
RU2179674C2 |
| ЭЛЕКТРОНАСОСНЫЙ ДОЗИРОВОЧНЫЙ АГРЕГАТ | 2003 |
|
RU2227846C1 |
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ПЕРЕМЕННОЙ СТЕПЕНЬЮ СЖАТИЯ | 2021 |
|
RU2762475C1 |
| МЕХАНИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2007 |
|
RU2334143C1 |
1. Манипулятор, содержащий основание, руку, выполненную в виде ползуна, оснащенного схватом, привод линейного перемещения руки, выполненный в виде кривошипно-шатуннвго механизма, и привод поворота руки, вьшолненньй в виде кулачкового механизма, а также средство регулировки величины перемещения руки, отличающийся тем, что, с целью обеспечения бесступенчатого регулирования зоны обслуживания, средство регулировки величины перемещения руки вьшолнено в виде фрикционного диска, соединенного с электромагнитом, управляе1уым программным устройством, причем кривошип кривошипно-шатунного мехаHH3fia выполнен в виде двух сопряженных эксцентриков - внешнего и внутреннего, установленных с возможностью поворота один относительно другого посредством введенной червячной передачи, при этом внутрег ний эксцентрик жестко соединен с -червячным колесом передачи, которое связано с роликом, взаимодействующим с фрикционным диском. .2. Манипулятор, содержащий основание, руку, выполненную в виде ползуна, оснащенного схватом, привод линейного перемещения руки, вьтолненньй в виде кривошипно-шатунного механизма, и привод поворота руки, выполненный в виде кулачкового ме- . I ханизма, а также средство регулировСО ки величины перемещения руки, о тличающийся тем, что, с целью обеспечения бесступенчатого регулирования зоны обслуживания, средство регулировки величины перемещения руки выполнено в виде кривоto шипа, состоящего из двух эксцентриОд ков - внешнего и внутреннего, установленных с возможностью поворота один относительно другого посред-ч ством моментного гидроцилиндра, высо полненного в виде камеры, размещенной ро внешнем эксцентрике и разделенной на полости радиальной пластиной, установленной на внутреннем эксцентрике, при этом моментный гидроцйлиндр оснащен распределителем, соединению с полостями камеры.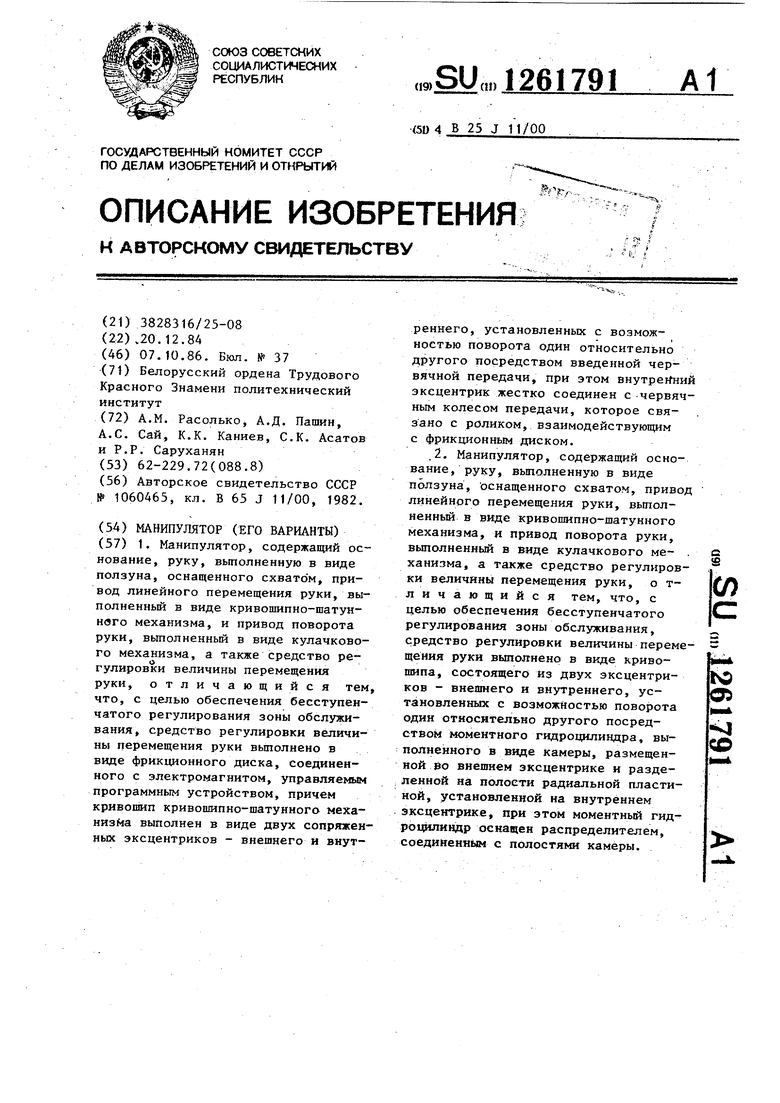
ts
| Манипулятор | 1982 |
|
SU1060465A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
