том 9 и суммарное поступательное и вращательное движение в плоскости. Суммарное движение в плоскости осуществляется с помощью кривошипно-ша- тунного йеханизма, приводимого в движение приводом, кинематически связанным с кулачковым механизмом, Указанное суммарное движение манипулятор осуществляет : с помощью фрикционной лобовой передачи, включа ющей фрикционный диск 16 и ролик J5. Фрикционная лобовая передача управляется программным устройством 18, имеющим электромаг нит 17, катушк которого установлена в корпусе с возможностью магнитного взаимрдейст -
1
Изобретение относится к области машиностроения и может быть использовано в гаражном оборудовании и на авторемзаводах.
Цель изобретения - расширение функциональных возможностей.
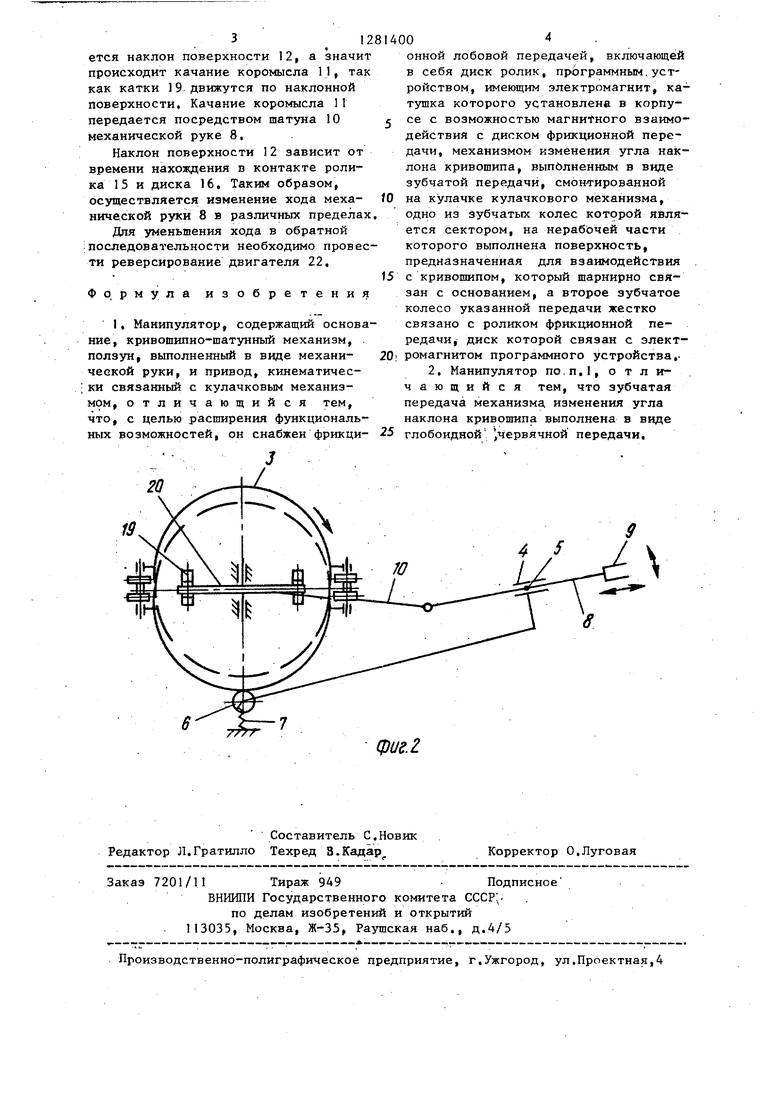
На фиг,1 - приведена кинематическая схема манипулятора; на фиг,2 - то же, вид сверху,
Манипулятор состоит из основания 1, на котором смонтирован с возможностью вращения приводной вал 2, жестко соединенный с кулачком 3 кула кового механизма, и стойки с напрев- ляющей 4, имеющей возможность поворота в горизонтальной плоскости вокруг оси 5, жестко соединенной с осью ролика 6р постоянно контактирзгющего с кулачком 3 посредством пружины 7, и смонтированной направляющей 4с возможностью перемещения в ней ползуна, вьшолненного в виде механической руки 8 со схватом 9,
Ползун связан с кривошипом кри- вршипно-шатунного механизма посредством шатуна 10 При этом кривошип выполнен в виде качающегося коромысла 1 1 и поверхности 12, предназначенной для взаимодействия с кривошипом связанной с механизмом изменения угл наклона кривошипа, указанный механиз вьшолнеНи в виде червячного колеса 13 и червяка 14, Последний жестко связан с роликом 15, взаимодействую-
ВИЯ с фрикционным диском 16. Манипулятор включает; приводной механизм изменения угла наклона кривошипа, вьшолненный в виде зубчатой переда -. чи, смонтированной на кулачке 3 кулачкового механизма. Одно из колес зубчатой передачи выполнено в виде сектора, на нерабочей части которого выполнена поверхность 12, предназначенная для взаимодействия с кривошипом. Кривошип шарнирНо связан с основанием 1, Второе колесо зубчатой передачи жестко связано с роликом лобовой передачи, фрикционный диск которой связан с электромагнитом программного устройства, 2 ил.
щим с фрикционным диском 16, который соединен с электромагнитом 17 программного устройства 18, Коромысло 11 снабжено катками 19, размещенными на оси 20 и взаимосвязанными с поверхностью 12 и шатуном 10, В основании 1 вмонтирован привод, включающий в себя коническую передачу 21 и электродвигатель 22,
Манипулятор работает следующим образом,
При включении электродвигателя 22 крутящий момент передается с помощью конической передачи 21 приводному валу 2 и связанному с ним кулачку 3. В результате ролик 6, обкатьтаясь по кулачку 3, вращает направляющую 4 механической рукк 8 вокруг оси 5, Одновременно катки 19 коромысла.П обкатьшаются по поверхности 12, которая при запуске манипулятора находится в горизонтальном положении. Поэтому механическая рука 8 со схватом 9 не получает поступательного перемещения, а совершает только поворот в горизонтальной плоскости.
При необходимости осуществ лен.ия суммарного поступательного и вращательного движений механической руки 8 со схватом 9 срабатьшает прог раммное устройство 18 и электромагнит 17 прижимает диск 16 к ролику 15.,Последний( обкатываясь по диску 16, вращает червяк 14 и червячное колесо 13, За счет этого осуществляется наклон поверхности 12, а значит происходит качание коромысла 11, так как катки 19 движутся по наклонной поверхности. Качание коромысла 1 Г передается посредством шатуна 10 механической руке 8,
Наклон поверхности 12 зависит от времени нахождения в контакте ролика 1 5 и диска 16, Таким образом, осуществляется изменение хода меха- нической руки 8 в различных пределах
Для уменьшения хода в обратной :последовательности необходимо провести реверсирование двигателя 22.
Формула изобретения
1, Манипулятор, содержащий основание, кривошипно-шатунный механизм, ползун, выполненный в виде механи- ческой руки, и привод, кинематически связанный с кулачковым механизмом, отличающийся тем, что, с целью расширения функциональных возможностей, он снабжен фрикци-
онной лобовой передачей, включающей в себя диск ролик, программным,уст- ройство1ч, имеющим электромагнит, катушка которого установлена в корпусе с возможностью MarHHtHoro взаимодействия с диском фрикционной передачи, механизмом изменения угла наклона кривошипа, выполненным в виде зубчатой передачи, смон-тированной на кулачке кулачкового механизма, одно из зубчатых колес которой является сектором, на нерабЬчей части которого выполнена поверхность, предназначенная для взаимодействия с кривошипом, который шарнирно связан с основанием, а второе зубчатое колесо указанной передачи жестко связано с роликом фрикционной передачи, диск которой связан с электромагнитом программного устройства,2. Манипулятор по.п.1, о т л и- чающийся тем, что зубчатая передача механизма изменения угла наклона кривошипа выполнена в виде глобоидной ,червячной передачи.
20
S
фиг. г
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор (его варианты) | 1984 |
|
SU1261791A1 |
| Манипулятор | 1981 |
|
SU1013257A2 |
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| Манипулятор | 1988 |
|
SU1521577A1 |
| Манипулятор | 1982 |
|
SU1013258A2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333828C1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| Манипулятор | 1989 |
|
SU1673430A1 |
| Механическая рука с программным управлением | 1980 |
|
SU994249A1 |
Манипулятор относится к области машиностроения и касается преимущественно манипуляторов для использования в гаражном оборудовании и на авторемзаводах. Целью изобретения является расширение функциональных возможностей. Манипулятор осуществляет отдельные движения: вращательное движение механической руки 8 со схва13 12 16 2 1 ,I -«Н 2J / 21 ////х/ 5; (Л 22 cpus.l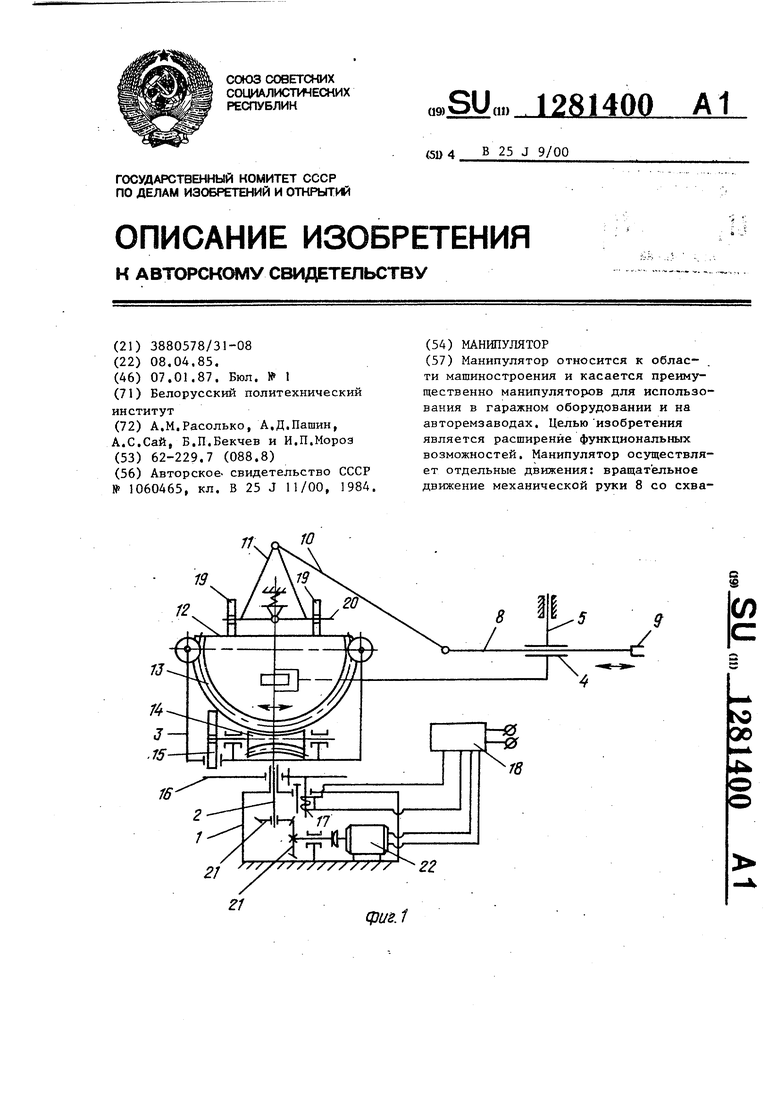
Составитель С.Новик Редактор Л.Гратилло Техред З.Кадар
Заказ 7201/11 Тираж 949 Подписное
ВНИИПИ Государственного комитета СССР:.
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Корректор 0.Луговая
| Манипулятор | 1982 |
|
SU1060465A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
