(Л /О
О5
о
4; О5 СП 11 Изобретение относится к машиностроению, а именно к промышленным манипуляторам. Известен манипулятор, содержащий основание, руку, выполненную в виде ползуна, кривошнпно-шатунный и кулачковый механизм 1 Однако известный манипулятор имеет недос таточную величину зоны обслуживания, что снижает его технологические возможности. Цель изобретения - расширение технологических возможностей за счет расширения зоны обслуживания. Цель достигается тем, что в манипуляторе, содержащем основание, руку, выполненную в виде ползуна, кривошипно-шатунный и кулачковый механизмы, шатун кривошипно-шатунного механизма вьшолнен составным и снабжен упругим элементом, расположенным между его частями, а напра.вляющие шарнирно соединены с основанием и жестко с роликом кулачкового механизма, причем на ползуне смонтированы дополнительно введеные регулируемые упоры, предназначеИные для взаимодей ствия с направляющей ползуна. На чертеже изображена кинематическая схе ма манипулятора в исходном положении. Манипулятор состоит из основания 1, на ко котором смонтировань с возможностью враще ния приводной вал 2 с жестко насаженным ку лачком 3 и стойка с направляющей 4, имеюще возможность поворота з вертикальной плоскости вокруг оси 5, жестко соеданенной с осью ролика 6, постоянно контактирующего с кулачком 3 посредством пружины 7 и смонти рованного в направляющей 4 с возможностью перемещения ползуна механической руки 8 с расположенными на ней регулируемыми упорами 9 и 10 исхватом 11. Ползун механической руки 8 связан с кривошипом 12 посредством составного щатуна 13, вьшолненного с возможностью изменения длины за счет упругого элемента. Манштулятор работает следующим образом При вращении приводного вала 2 кривошип 12 посредством щатуна 13 перемещает ползун механической руки 8 в горизонтальной плоскости. При наезде регулируемого упора 9 на направляющие стойки 4 ползун механической руки 8 останавливается. А за счет деформации упругого элемента составного шатуна 13 кулачок 3 продолжает вращаться совместно с приводным валом 2 и своим профилем приподнимает ролик 6, поворачивал нагсравляющую 4 и ползун механической руки 8 в вертикальной плоскости вокруг оси 5. При этом схват 11 подводится к перемещаемому изделию. Дальнейшее вращение приводного вала 2 обеспечивает подьем схвата П, перемещение ползуна механической руки 8 в обратном направлении до наезда второго регулируемого упора 10 на направляющие стойки 4 и остановку ползуна механической руки 8. Кулачок 3 другой стороной своего профиля посредством ролика 6 опускает схват 11 для разгрузки и поднимает его. После окончания деформации упругого элемента составного ползуна 13 ползун механической руки 8 начинает двигаться в обратном направлении до исходаого положения, где останавливается за счет прекращения вращения приводного вала 2, заверщ шщего один оборот и, соответственно, выполнившего рабочий цикл. Применение составного шатуна 13 с элементом в виде пружины обеспеч шает мягкую и точную остановку ползуна механической руки 8, а использование регулируемых упоров 9 и 10, расположенных на механической руки 8, позволяет в значительных пределах изменять длину пути перемещения изделия в горизонтальной плоскости, тем сг.мым расщиряя технологические возможности манипулятора.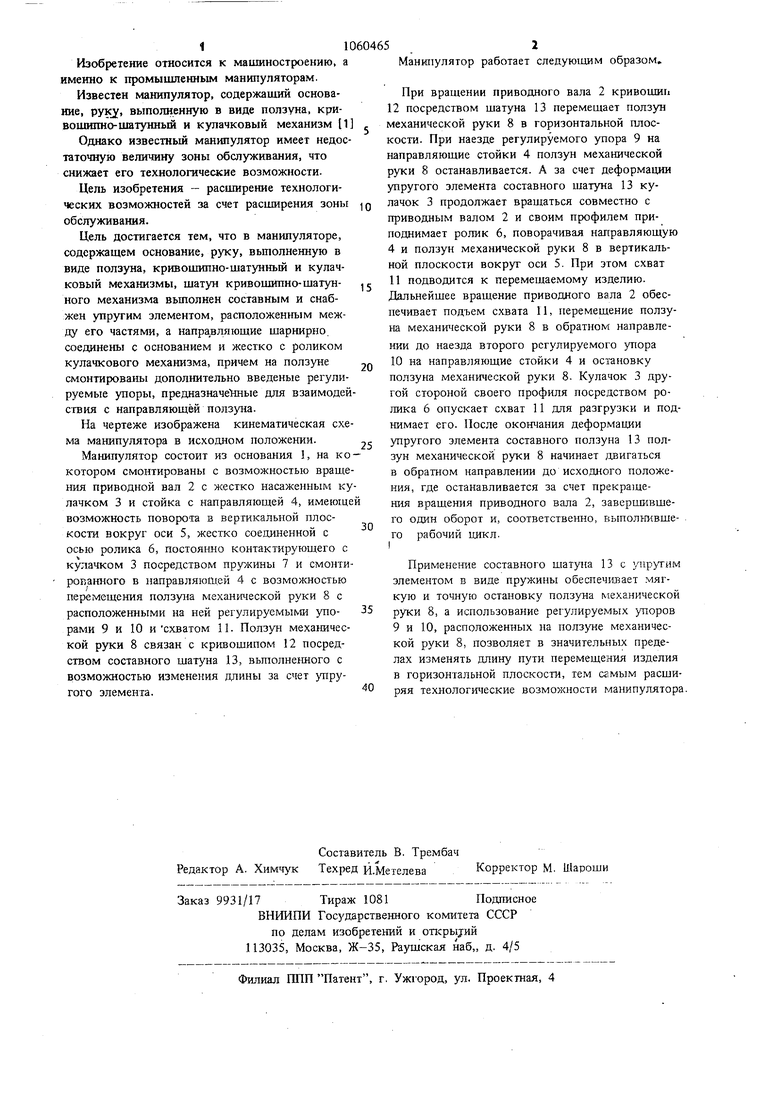
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1435363A1 |
| Манипулятор (его варианты) | 1984 |
|
SU1261791A1 |
| Манипулятор | 1985 |
|
SU1281400A1 |
| Манипулятор | 1988 |
|
SU1569223A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Манипулятор | 1986 |
|
SU1380927A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179108C1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Механический пресс | 1979 |
|
SU1004151A1 |
МАНИПУЛЯТОР, содержащий основание, руку, выполненную в виде ползуна, кривошипно-шатунный и кулачковый механизмы, отличающийся тем, что. с целью расширения технологических возможностей за счет расширения зоны обслуживания, шатун кривошипно-шатунного механизма выполнен составным и снабжен упругим элементом, расположе1шым между его частями, а направляющие шарнирно соединены с основанием и жестко с роликом кулачкового механизма, причем на ползуне смонтированы дополнительно введенные регулируемые удары, предназначенные для взаимодействия с направляющей ползуна.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1978 |
|
SU751618A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
