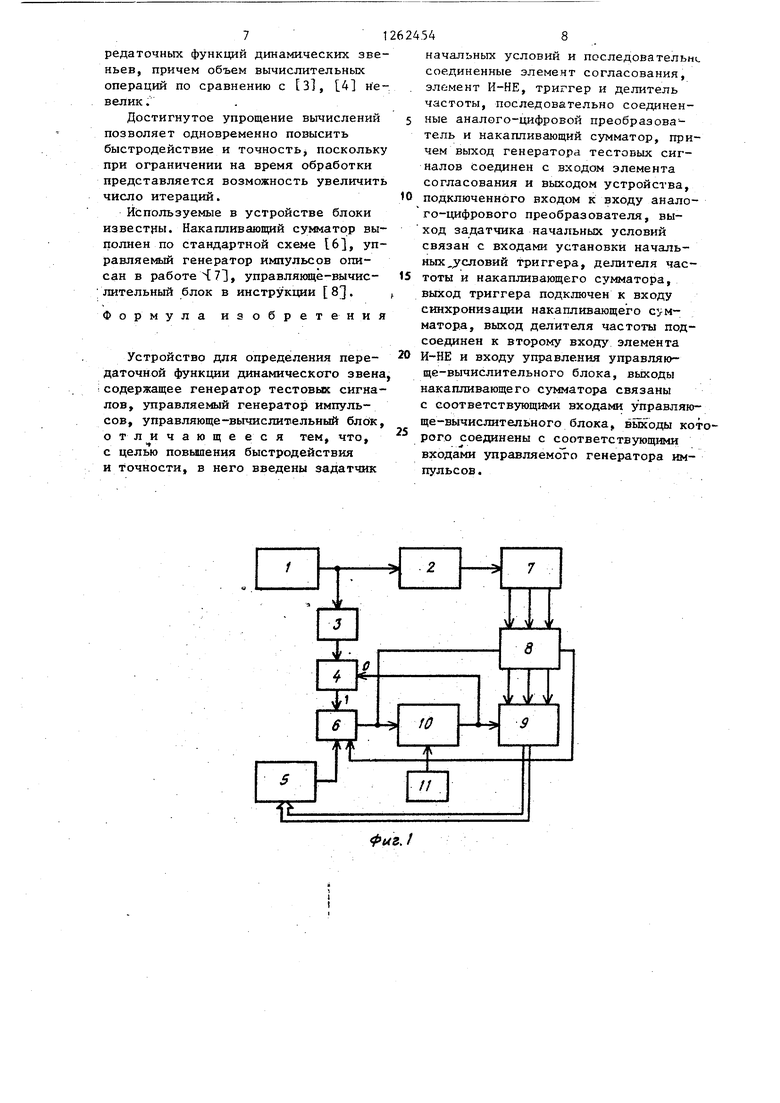
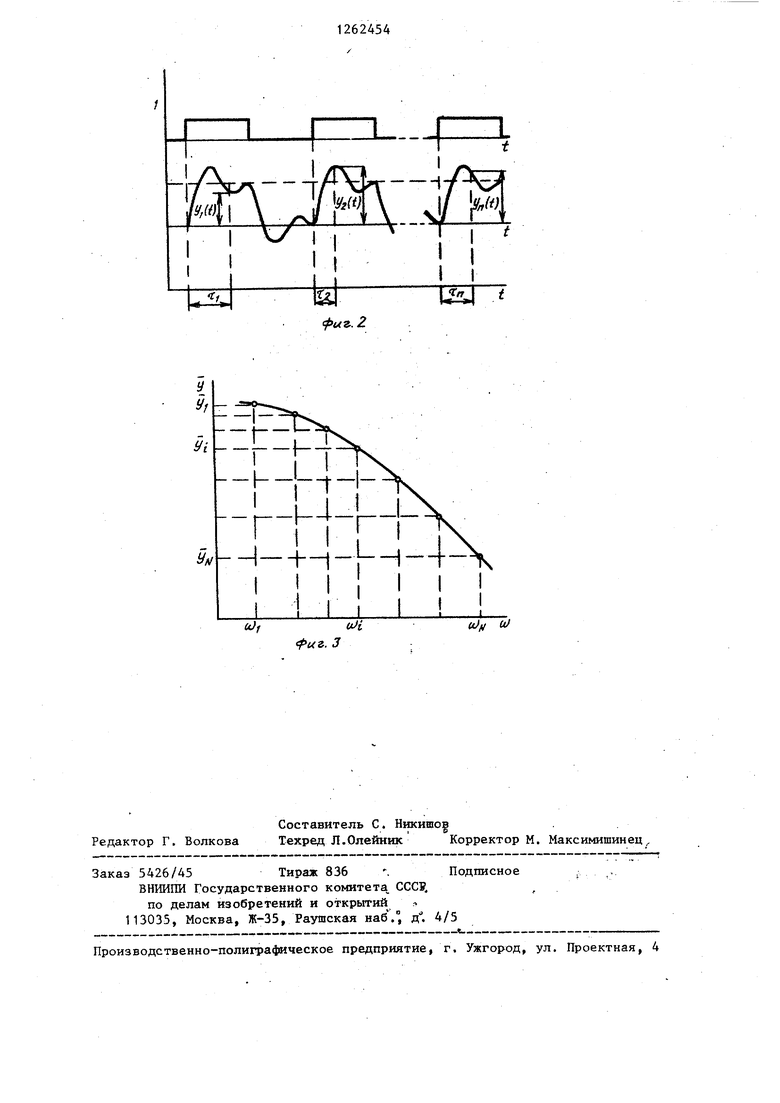
Изобретение относится к автоматическому управлению и может быть использовано для определения переда точных функций динамических звеньев например электронных корректирующих блоков систем автоматического управ ления . Целью изобретения является повышение быстродействия и точности. На фиг.1 приведена блок-схема предлагаемого устройстваJ на фиг.2 временные диаграммы, поясняющие ра боту устройства на фиг.З - график поясняющий переход от экспериментальных данных к искомой передаточ ной функции. Устройство содержит генератор 1 тестовых сигналов, исследуемое ,2 динамическое звено, элемент 3 согласования, элемент И-НЕ 4, управляемый генератор 5 импульсов, триг гер 6, аналого-цифровой 7 преобразователь, накапливающий 8 сумматор ynpasj яюще-вычислительный 9 блок, делитель 10 частоты и задатчикИ начальных условий. Устройство работает ледующим образом. На вход исследуемого динамического звена подают единичный ступен чатый управляю1дий сигнал и через случайный промежуток времени измеряют значения выходного сигнала 1Дь), после чего входной управляющий сигнал снимают. После установления на выходе динамического звена начальных условий вновь подают входной единичный управляющий сигнал, измеряя через случайный промежуток времени новое значение передаточной функции ), и так далее. При постоянном значении мат матического ожидания случайных интервалов времени М, М. -:. const распределенных по показательному закону с плотностью распределения вероятностей 11 производят серию из N измерений ординат I, (Т-) переходной функции I(t). В приведенных формулах tJ- вели чина, обратная математическому ожи 4 , Данию случай ных интервалов времени Т. между моментами подачи, входного единичного управляющего сигнала и измерения ординаты IjCt ) переходной функции динамического звена. Результаты проведенных измерений усредняют. Среднее значение ординат IjCtj) переходной функции, измеренных при выбранном значении математического ожидания случайных интервалов времени М, равно I Ц 01) Производят серии измерений орди-, нат переходной функции с последующим усреднением результатов при различных значениях математического ожидания интервалов t-, между моментами подачи входного единичного управляющего сигнала и, измеряя ор-динаты переходной функции, получают совокупность точек 1(чл))(фиг.З) . Параметром полученной зависимости выбирают величину , равную обратному значению математического ожидаяия случайных интервалов tj . Для перехода от полученной табличной зависимости ) к значениям искомой передаточной функции динамичес- кого звена достаточно аппроксимировать ее аналитическим выражением i - тБ котором параметр и) заменяют комплексным оператором ),находя значение передаточной функции исследуемого динамического звена как зависимость усредненных ординат от мнимой величины с коэффициентом, обрАтным математическому ожиданию интервалов t, . В действительности, при достаточно больших значениях числа N измерений в серии среднее значение измеряемых ординат Ij(t) равно математическому ожиданию непрерывной случайной величины 1, которой в рассматриваемых условиях является ордината I(t) переходной функции динамического звена ((, (51 rflef(t) - плотностд распределения вероятностей интервалов, l(t) - текущее значение переход ной функции звена. При показательном законе распределения интервалов i усредненное значение ординат I- Ci), измеренных при const, может быть представлено аналитическим выражением 1(лЗ) )fl(t). (6) Аппроксимируя табличную зависимость () аналитическим вьфажение в функций- , сопоставляем результат с формулой (6) HI l(t)e Для доказательства соответствия табличной зависимости ) значе ниям искомой передаточной функции воспользуемся методом математическо индукции. По определению, передаточная фун ция W(S) динамического звена связан со значением его переходной функции Y(t) преобразованием Карсона, т.е. имеет место интегральное преобразование (2) W(S) sf Y(t). . Выражение (6) следует из прямой подстановки в (5) выражения f(t) jJe , определяющего плотность рас пределения интервалов для показател ного закона. Таким образом, совокуп ность точек Y| (и)) , полученных в результате проведения серий измерений при различных значениях математического ожидания интервалов М (t) J) принадлежит функции УС)), являющейся решением интеграла (6). В свою очередь, интеграл (6) по виду полностью совпадает с интегральным преобразованием Карсона (8), определяющим значение передаточной функции звена. Следовательно, функщ я Y(ijJ), аппроксимирующая табличную зависимость ), точки которой принадлежат решению интеграла (6), полностью характеризует передаточную функцию звена W(S). Для полного формального соответствия рассматриваемых функций достаточно произвести замену параметраuJ на комплексньш оператор ). Графическая интерпретация данной замены наиболее проста и сводится к изменению параметра oJ оси абцисс. на ,B результате чего аппроксимация новой табличной зависимости Y(S) аналитическим выражением производится уже в функции S и совпадает с передаточной функцией динамического звена. При подготовке устройства для определения передаточной функции ди.намического звена к работе триггер 6, делитель 10 частоты и накапливающий сумматор 8 устанавливают в нулевое состьяние, настраивают заданный уровень и длительность сигнала 1(t) на выходе генератора 1 тестовых сигналов. В память управляю ще-вычислительного блока 9 записывают значение двоичных кодовьк комбинаций, соответствующих математическому ожиданию uJ частоты следования импульсов на выходе управляемого генератора 5 импульсов. В проглесе работы устройства на выходе ге- .нератора 1 тестовых сигналов формируете ся сигнал типа меандр амплитуды 1 (t) и длительности Т, достаточной для завершения переходного процесса на выходе динамического звена 2. Этот сигнал поступает одновременно на вход исследуемого динамического звена 2 и элемента 3 согласования. Сигнал I(t) с выхода динамического звена 2 преобразуется вдвоичный код аналого-цифровьи преобразователем 7, выходы которого подключены к входам накапливающего сумматора 8. В мамект появления сигнала 1(t) на выходе элемента 3 согласования, подключенного к первому входу логического элемента И-НЕ 4, формируется сигнал высокого логического уровня. Поскольку на втором входе элемента 4 И-НЕ, подключенном к выходу делителя 10 частоты, также присутствует сигнйл логической единицы, на первом управляющем входе триггера 6 формируется отрицательный перепад сигнала, устанавливающий триггер в единичное состояние, увеличив на единицу содержимое делителя 10 частоты. На вход управления генератора 5 импульсов поступает двоичный кодовый сигнал с выходов управляюще вычислительного блока 9, обеспечивающий формирование на выходе блока 5 случайного импульсного потока с математическим ожиданием.частоты следования импульсов. Интервалы между импульсами распределены по показател ному закону с плотностью распределения вероятностей (2). Первьш импульс, пришедший на второй вход управления триггера 6 после его срабатывания по началу подачи на вход динамического звена 2 единич ного управляющего сигнала 1(t), своим задним фронтом обнуляет сигнал на выходе триггера 6, одновременно записывается значение, двоичной кодовой комбинации Z(t) на выходах аналогоцифрового преобразователя 7 в нака.пливающий сумматор 8. Последующее состояние предлагаемо го устройства является устойчивым, поскольку запись двоичной, кодовой комбинации, пропорциональной значени ординаты переходной функции динамического звена 2 в накапливающий сумматор 8, производится только в момен отрицательного перепада сигнала на выходе триггера 6. Через интервал времени Т сигнал на выходе генератора 1 становится равным О, после чего сигнал на выходе динамического звена 3 принимает исходное значение. После появления на выходе генератора тестовых сигналов величины 1(t) вновь срабатывает триггер 6,увеличи вая на единицу содержимое делителя 10 частоты, запись очередного значеНИН ординаты переходной функции Zri(ir) в накапливающий сумматор 8 производится в момент возврата триггера 6 в исходное состояние задним фронтом соответствующего случайного импульса с вькода генератора 5 и так далей. Таким образом, на выходе накапливающего сумматора формируется двоичный сигнал Z(a).) Z- Z.(t),(9) i f. где N - число срабатываний триггера 6 . После того, как число срабатываний триггера 6 составит 2 (L - разрядность делителя 10 частотьу, на вы ходе делителя 10 частоты формируетс сигнал низкого логического уровня, о которому сигнал с выходов М - L . тарших разрядов накапливающего суматора 8 записывается в память управяюще-вычислительного блока 9, пос- е чего блок 9 формирует на управяющих входах генератора 5 импульсов воичньй кодовый сигнал, обеспечивающий формирование на его выходе v случайного импульсного потока с маТематическим ожиданием частоты следования импульсов oJ . Для нового цикла измерений ZCt) при ul и сигналом низкого логического уровня с выхода датчика сигнала начальных условий обнуляют накапливаюшлй сумматор 8 и делитель 10 частоты (триггер 6 уже обнулен сигналом с выхода генератора 5). После чего устройство производит серию из 2 измерений ординат переходной функции динамического звена 3, в результате которого новое усредненное значение Jr z,(rr -2L - записывается в память управляющевычислительного блока и так далее. После того, как будет произведено заданное число К серий измерений среднего значения ординат переходной функции при заданных значениях математического ожидания частоты следования случайных импульсов и) , уп равляюще-вычислительный блок 9 вычисляет коэффициенты функции :::7 аппроксимирующей полученную табличную зависимость 2(w3) , Аналитическая зависимость P(uJ)/Q(u)), записанная с вычисленными коэффициентами по виду, совпадает с передаточной функцией W(S) динамического звена. Для . окончательного перехода Z(Ai)(S) необходимо произвести Замену переменной OL) на комплексный оператор ) , где величина взята с коэффициентом, обратным математическо-. му ожиданию случайных интервалов между моментами подачи на вход дина.мического звена 2 единичного управляющего сигнала 1(t) и измерений оргин аты переходной функции, Таким образом, предлагаемое устройство позволяет с высокой эффективностью определить параметры передаточных функций д шамических звеньев, причем объем вычислительных операций по сравнению с З, 4 невелик .
Достигнутое упрощение вычислений 5 позволяет одновременно повысить быстродействие и точность поскольку при ограничении на время обработки представляется возможность увеличить число итераций.10
Используемые в устройстве блоки известры. Накапливающий сумматор выполнен по стандартной схеме 16, управляекйой генератор импульсов опиан в работе Ч 71, управляюще-вычис- 15 ительный блок в инструкции 8. t
Формула изобретения
Устройство для определения передаточной функции динамического звена, содержащее генератор тестовых сигналов, управляемый генератор импульсов, управляюще-вычислительный блбк, отличающееся тем, что, с целью повыпения быстродействия точности, в него введены задатчик
начальных условий и последователын соединенные элемент согласования, элемент И-НЕ, триггер и делитель частоты, последовательно соединенные аналого-цифровой преобразователь и накапливающий сумматор, причем выход генератора тестовых сигналов соединен с входом элемента согласования и выходом устройства, подключенного входом к входу аналого-цифрового преобразователя, вы ход задатчика начальных условий связан с входами установки начальных,условий триггера, делителя частоты и накапливающего cyi iaTopa, выход триггера подключен к входу синхронизахщи накапливающего сумматора, выход делителя частоты подсоединен к второму входу элемента И-НЕ и входу управления управляюще-вычислительного блока, выходы накапливающего сумматора связаны с соответствующими входами Управляюще-вычислительного блока, вькоды корого соединены с соответствующими входами управляемоТо генератора импульсов .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения передаточной функции динамического звена | 1987 |
|
SU1432466A1 |
| Устройство для определения вероятностных характеристик фазы случайного процесса | 1985 |
|
SU1300510A2 |
| Устройство для определения вероятностных характеристик фазы случайного сигнала | 1982 |
|
SU1112377A1 |
| Устройство для измерения вероятностных характеристик фазы случайного сигнала | 1985 |
|
SU1320822A1 |
| Многоканальный статистический анализатор | 1983 |
|
SU1215119A1 |
| Коррелометр | 1985 |
|
SU1304035A1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ МАТЕМАТИЧЕСКОЙ МОДЕЛИ НАВИГАЦИОННЫХ ДАТЧИКОВ | 1972 |
|
SU342198A1 |
| УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ ПРЕОБРАЗОВАНИЯ ФУРЬЕ | 2000 |
|
RU2182358C2 |
| Устройство для определения стационарности случайного процесса | 1981 |
|
SU1109761A1 |
| СПОСОБ УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365964C2 |
Изобретение относится к автоматическому управлению и «5жет быть использовано для экспериментального определения передаточных функций динамических звеньев. Целью изобретения является повышение быстродействия и точности. Особенностью устройства является то, что измерение значений переходной характеристики динамического звена производят в случайные моменты времени, а передаточизто функцию определяют как зависимость значений усредненных ординат от мнимой величины, взятой (Л с коэффициентом, 6братным математис ческому ожиданию случайных интервалов времени между моментами подачи единичного управляющего сигнала и измерения ординат выходного сигнала. 3 ил. to О) ю ел 4;ii
U
г-И-г
I I I
I I
1
1
фиг. 3
и)ц л
| Вентцель E.G | |||
| и Овчаров Л.А | |||
| Прикладные задачи теории вероятностей.-М.: Радио,и связь, 1983 | |||
| Канатное устройство для подъема и перемещения сыпучих и раздробленных тел | 1923 |
|
SU155A1 |
| Бессекерский В.А | |||
| и Попов Е.П | |||
| Теория систем автоматического регулирования | |||
| -М.: Наука, 1972, с.60,72 | |||
| Дехтяренко П.И | |||
| и Коваленко В.П | |||
| Определение характеристик звеньев систем автоматического регулирования.-М.: Энергия, 1973, с.91 | |||
| Балакирев B.C | |||
| и др | |||
| Экспериментальное определение динамических характеристик промышленных объектов управления | |||
| -М.: Энергия, 1967, с.62, 97 | |||
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ СИСТЕМ АВТОМАТИЧЕСКОГО | 0 |
|
SU377739A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Тарабрин Б.В | |||
| и др | |||
| Справочник по интегральным микросхемам | |||
| -М.: | |||
| Энергия, 1980, с.741 | |||
| Четверикова В.И | |||
| и др | |||
| Вычислительная техника для статического моделирования | |||
| -М.: Советское радио, 1978, с.139 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Насос | 1917 |
|
SU13A1 |
