Изобретение относится к измерительной технике, а именно к устройствам неразрушающего контроля, предназначенным для обнаружения нарушений сплошности или однородности макроструктуры объектов инспекции. Преимущественной областью применения устройства является ультразвуковой контроль (УЗК) металлопродукции или изделий из композитных материалов. Техническое решение также применимо в установках магнитной дефектоскопии или в иных установках, осуществляющих перемещение искательной головки в процессе сканирования объекта инспекции по площади. В частности, изобретение позволяет производить дефектоскопический контроль металлопродукции плоской формы, включая сляб и блюм, а также контроль объектов сложной формы, например, крыла летательного аппарата.
Для перемещения искательной головки дефектоскопа по поверхности объекта инспекции в процессе его сканирования по площади необходимо техническое средство для позиционирования и ориентации головки в пространстве.
Из патентного документа WO 2017/123112 А1 от 20.07.2017 известен дефектоскоп, содержащий ведущее исполнительное устройство и ведомый измерительный модуль с искательной головкой дефектоскопа для сканирования горизонтальных поверхностей электромагнитно-акустическими преобразователями (ЭМАП). Головка снабжена ходовой частью с опорными роликами. Ходовая часть выполнена по двухосной схеме. В процессе работы подвижные головки ЭМАП повторяют в движении профиль неровностей поверхности объекта инспекции, благодаря чему поддерживается постоянство воздушного зазора при контроле объектов, поверхность которых не ровная, в частности из-за окалины. Однако известное устройство малопрогодно для контроля прикромочной зоны объекта инспекции, так как контроль указанной зоны требует вывешивания передней оси ходовой части для приближения искательной головки к самому краю объекта инспекции, из-за чего вес модуля распределяется между задней осью ходовой части и ЭМАП. Преобразователи испытывают при этом чрезмерную механическую нагрузку, а работа их подвижных элементов в качестве следящего устройства за профилем неровностей поверхности оказывается нарушенной, что снижает достоверность контроля. Потеря опорной способности двухосной ходовой части в свою очередь создает угрозу схода измерительного модуля дефектоскопа с края объекта инспекции.
Технической проблемой, решение которой обеспечивается при использовании настоящего изобретения, является предотвращение схода измерительного модуля дефектоскопа с края объекта инспекции и увеличение надежности неразрушающего контроля прикромочной зоны.
Обеспечиваемый изобретением технический результат заключается в повышении опорной способности шасси измерительного модуля установки для дефектоскопического сканирования на кромке объекта инспекции, и в увеличении при этом эффективности следящего устройства данного модуля.
Технический результат достигается благодаря тому, что установка для дефектоскопического сканирования содержит ведущее исполнительное устройство и ведомый измерительный модуль с ходовой частью, посередине которой закреплена искательная головка дефектоскопа. Причем данная установка выполнена с возможностью хода модуля по вертикали, и содержит узел поворота ходовой части модуля на месте. При этом ходовая часть выполнена в виде одноосного шасси с опорными колесами.
В частном случае осуществления изобретения ходовая часть измерительного модуля содержит поворотный держатель, выполненный с вертикальным хвостовиком, через который ходовая часть связана с исполнительным устройством. При этом указанный хвостовик расположен оппозитно искательной головке дефектоскопа относительно колесной оси.
В другом частном случае профиль колес ходовой части характеризуется цилиндрической поверхностью катания и сопряженной с ней конусной боковой частью обода с наружной стороны колеса.
Сущность изобретения поясняется следующими чертежами и схемой, на которых в качестве предпочтительного примера выполнения устройства показана конструкция дефектоскопической установки для УЗК металлопродукции плоской формы.
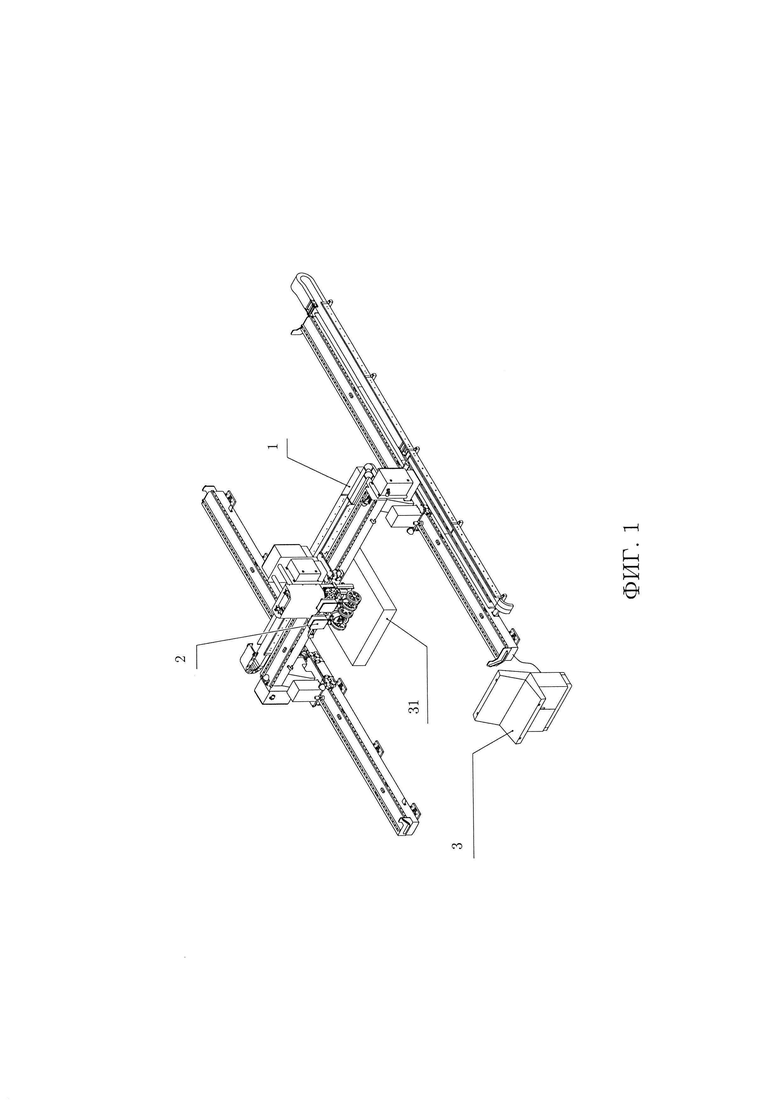
Фиг. 1: общий вид установки для дефектоскопического сканирования.
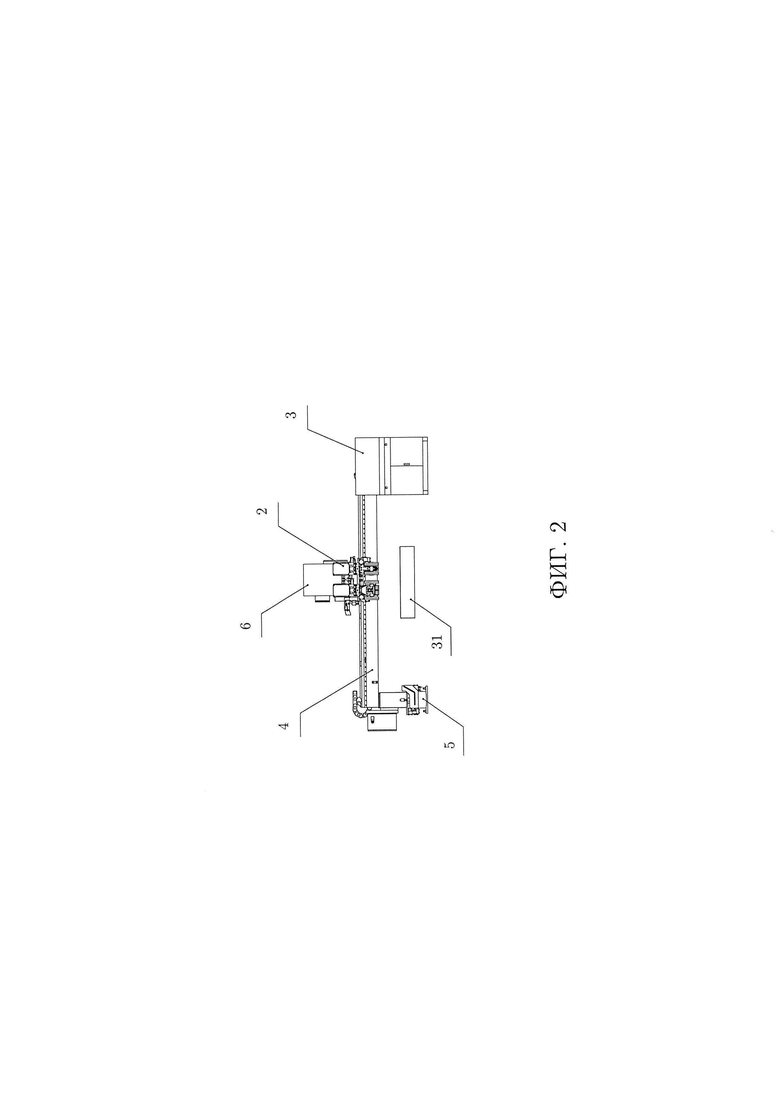
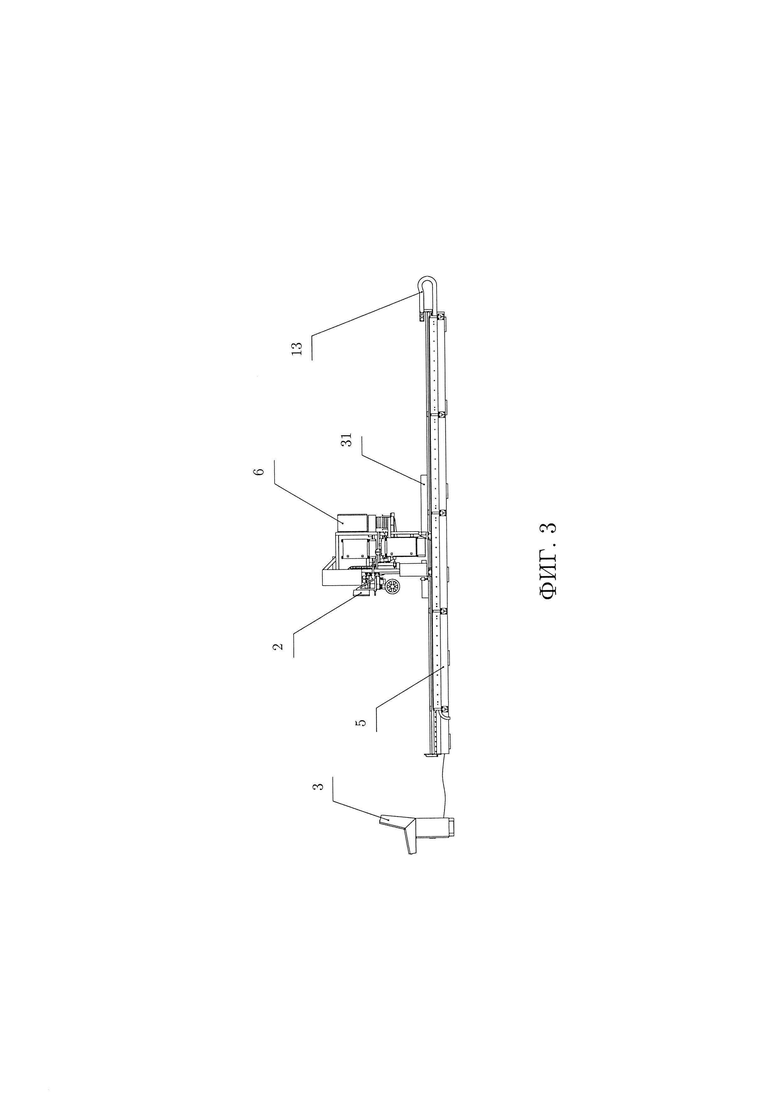
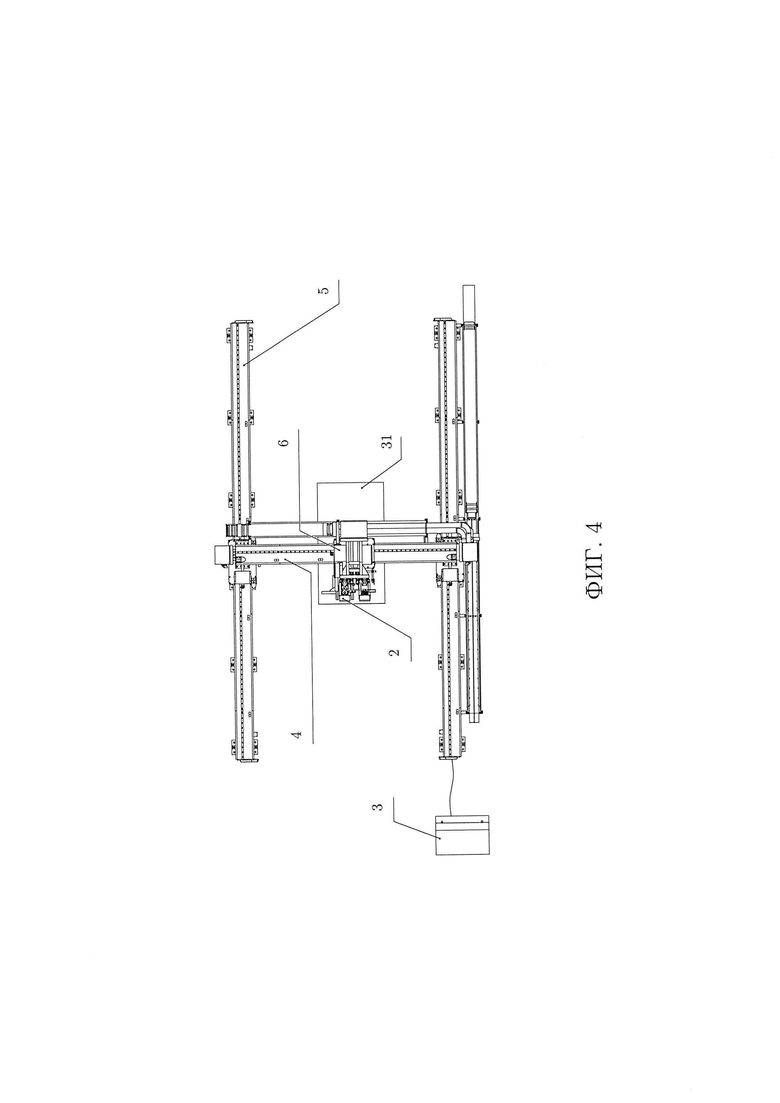
Фиг. 2-4: установка, вид спереди, сбоку и сверху.
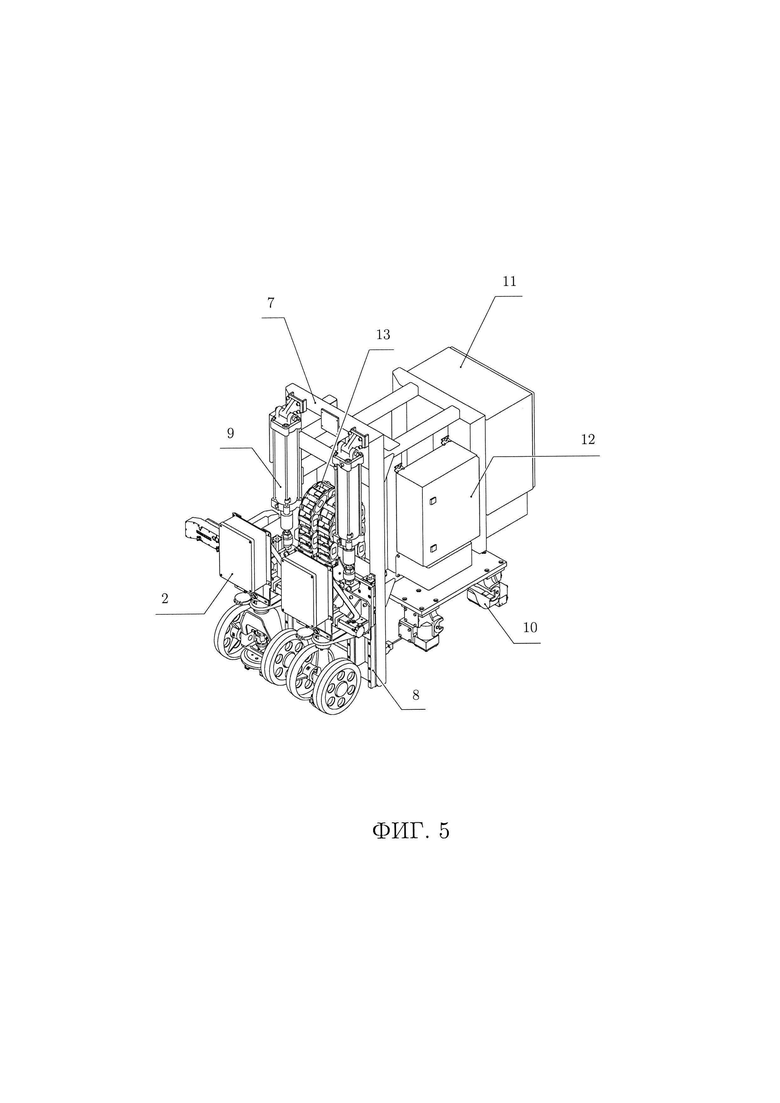
Фиг. 5: каретка с парой измерительных модулей, общий вид при снятом кожухе.
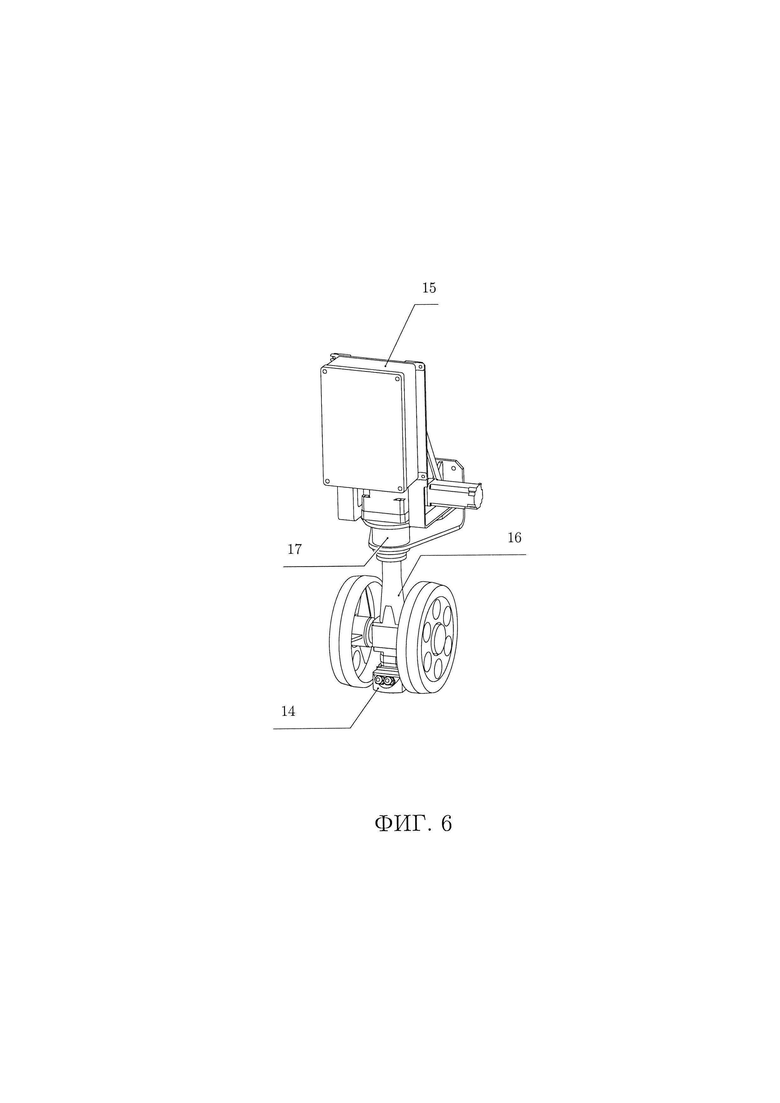
Фиг. 6: измерительный модуль, общий вид.
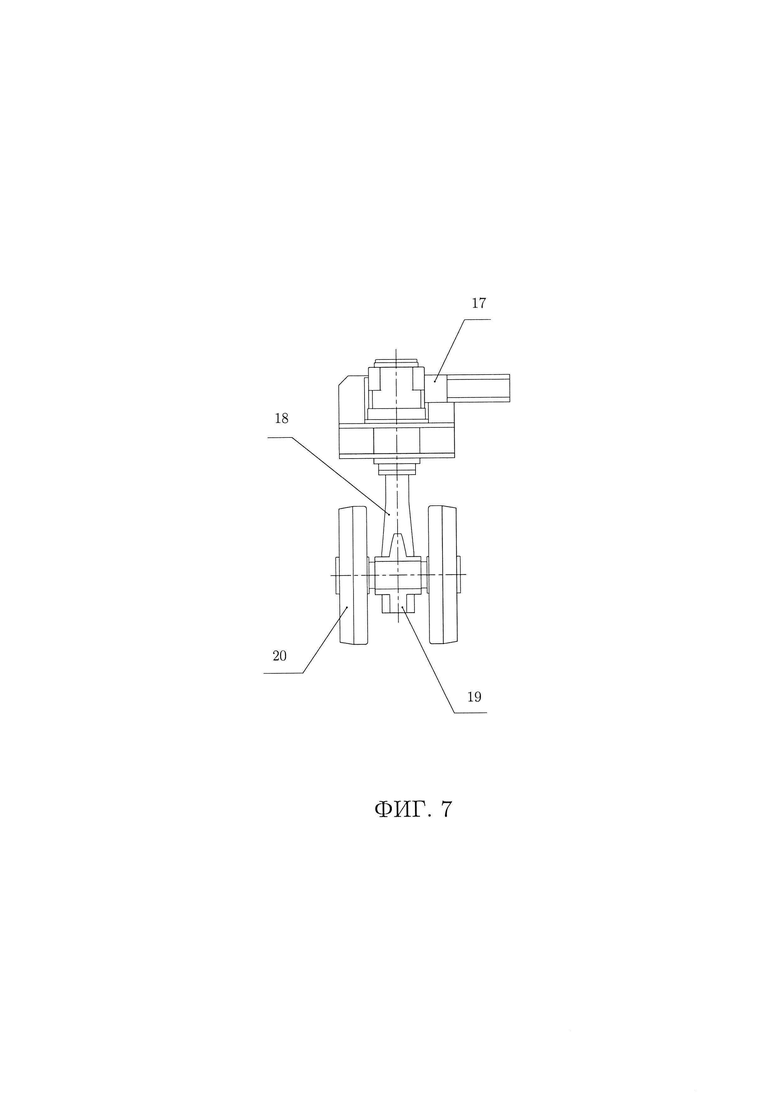
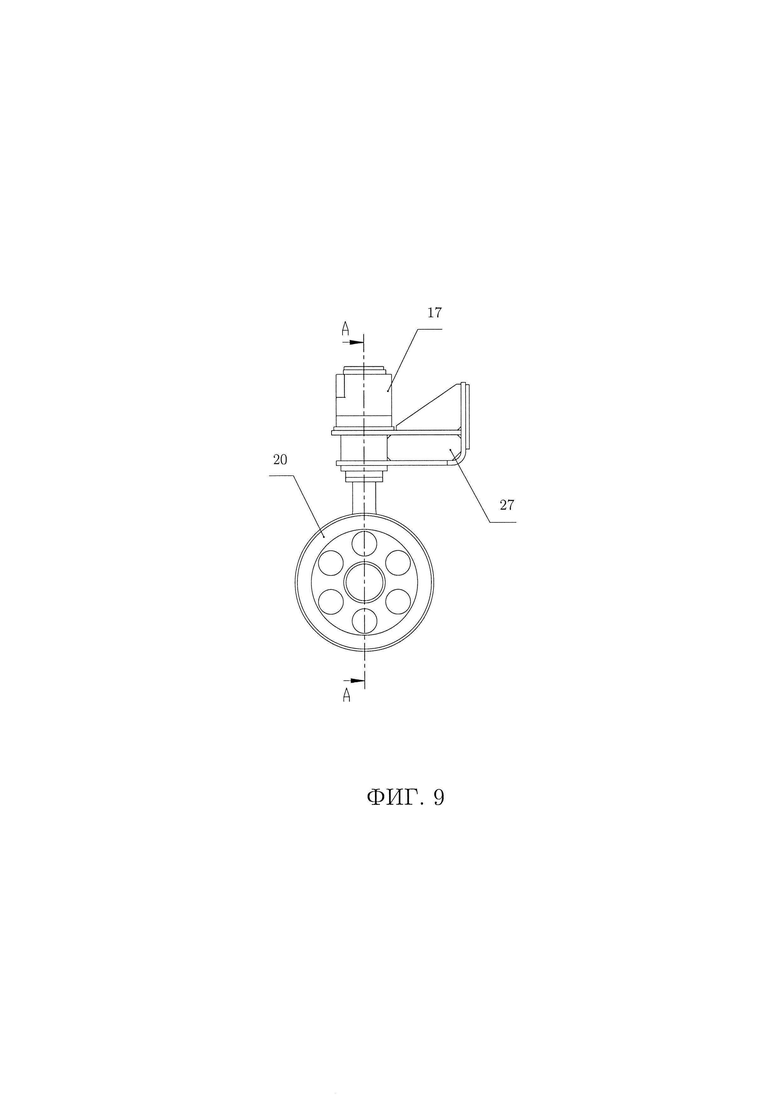
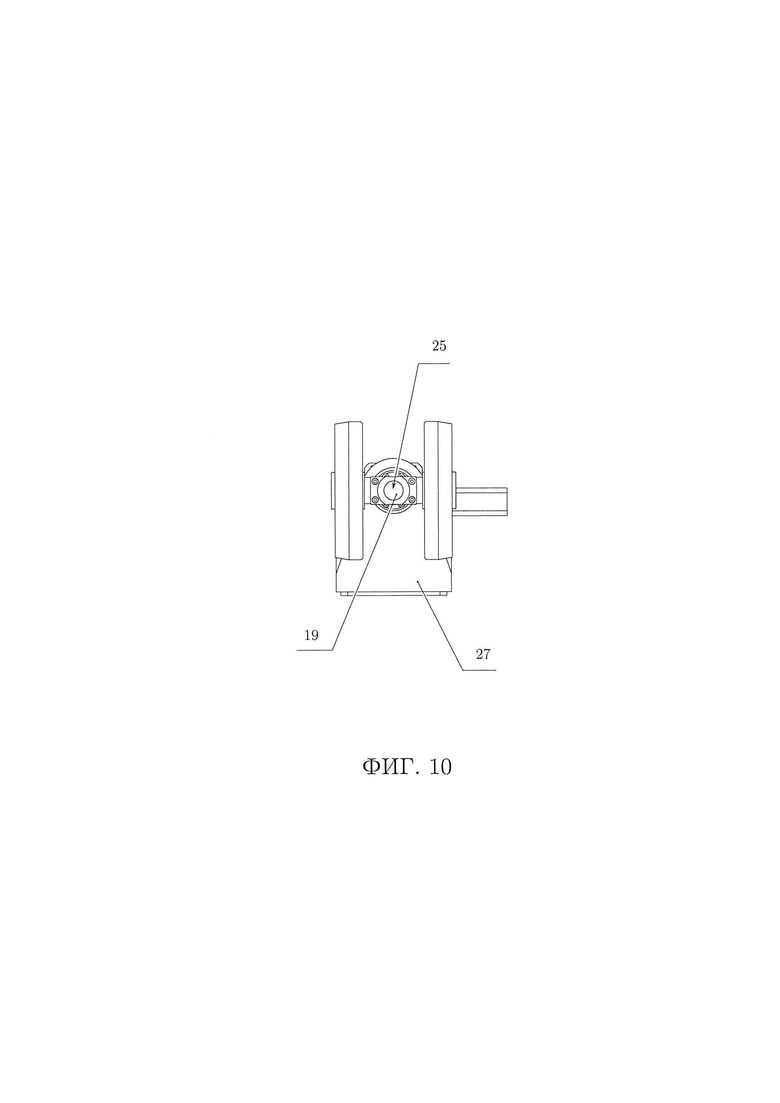
Фиг. 7-10: шасси модуля, вид спереди, в разрезе, сбоку и снизу.
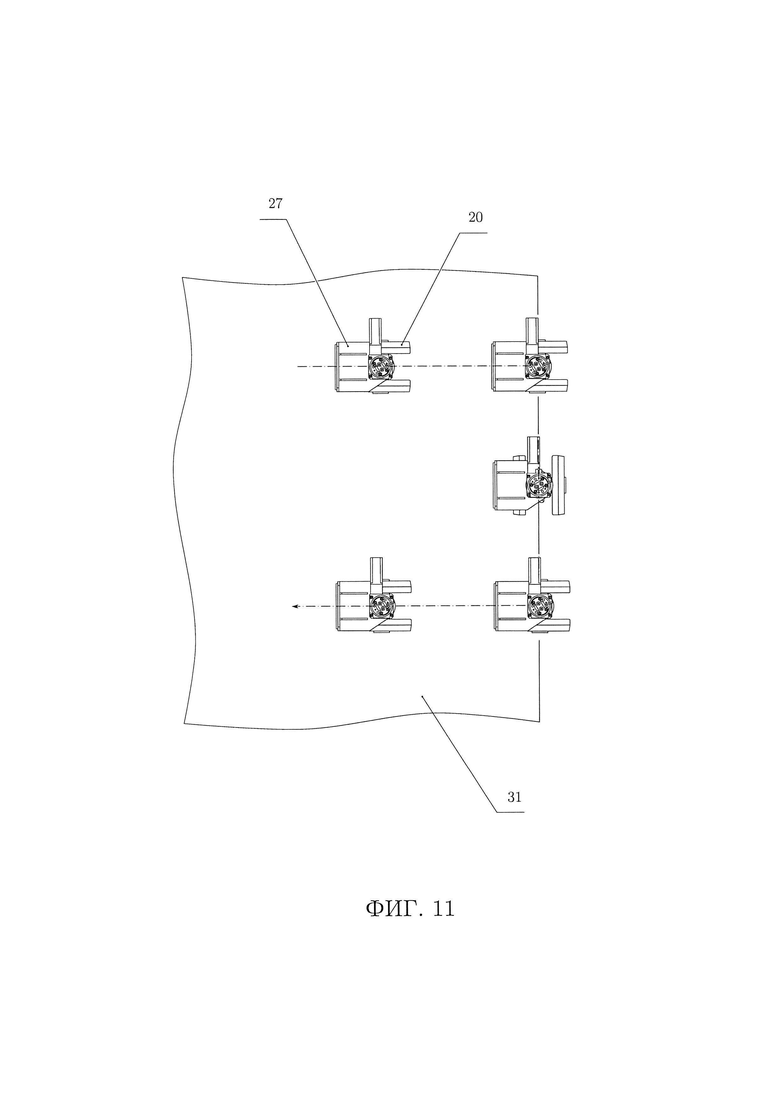
Фиг. 11: схема перемещения шасси на крае объекта инспекции, вид в плане.
Представленная дефектоскопическая установка для УЗК содержит ведущее кинематическое исполнительное устройство 1, ведомые измерительные модули 2, вычислитель 3 (фиг. 1-4), и систему определения пространственных координат модулей 2.
Исполнительное устройство 1 состоит из подвижной поперечной портальной балки 4, продольного рельсового пути 5 и моторизированной каретки 6. Балка 4 содержит горизонтальную перекладину и вертикальные колонны. Перекладина балки 4 выполнена с направляющими для каретки 6, длина которых соответствует расстоянию между рельсами пути 5. Каждая колонна балки 4 имеет ходовую часть, снабженную электрическим приводом для передвижения балки 4 по рельсам пути 5.
Каретка 6 включает в себя рамный каркас 7, вертикальные направляющие 8, пневмоцилиндры 9, подшипниковые блоки 10 с сервоприводами, шкаф автоматики 11, насосный шкаф оборудования пневматики 12 и гибкие кабельные траки 13 (фиг. 5). В рабочем состоянии внутреннее оборудование каретки 6 закрыто спереди защитным кожухом.
Измерительный модуль 2 состоит из искательной головки 14 с по меньшей мере одним дефектоскопным ЭМАП для излучения зондирующего акустического сигнала и приема ответного сигнала, электронного блока 15 с сигнальным процессором, шасси 16 с колесной ходовой частью, и электромеханического узла 17 для поворота шасси 16 вокруг нормали к плоскости объекта инспекции (фиг. 6).
Конструкция шасси 16 включает в себя поворотный держатель 18, соединитель 19 для искательной головки 14 и опорные колеса 20 (фиг. 7-10). Несущее основание шасси 16 образуют полый цилиндр 21 и полуоси 22. Держатель 18 выполнен с хвостовиком 23. Под хвостовиком 23 понимается верхняя часть держателя 18, которую используют для крепления держателя 18 к узлу 17. Колеса 20 выполнены в виде дисков с перфорацией и ободами, которые характеризуются поверхностями катания. Колеса 20 снабжены втулками 24 с подшипниками.
Полуоси 22 жестко соединены с цилиндром 21 своими коренными концами так, что лежат на одной горизонтальной геометрической колесной оси X. Втулки 24 насажены на выступающие из цилиндра 21 свободные концы полуосей 22, таким образом колеса 20 связаны с полуосями 22 через подшипники втулок 24 с возможностью их свободного и независимого вращения относительно основания шасси 16. Соединитель 19 размещен под цилиндром 21 и неподвижно соединен с ним одной своей стороной. На противоположной стороне соединителя 19 выполнено посадочное место 25 для закрепления искательной головки 14. Держатель 18 смонтирован над цилиндром 21 так, что хвостовик 23 расположен напротив посадочного места 25 относительно оси X колес 20. Полуоси 22 и соединитель 19 жестко связаны с хвостовиком 23 через цилиндр 21, нижнюю и центральную части держателя 18.
Узел поворота 17 состоит из втулки 26, уголкового кронштейна 27, механизма 28 для поворота и фиксации положения колесной оси X, сервопривода 29 и подвеса 30 для шасси 16.
Все перечисленные элементы установки соединены между собой сборочными операциями и находятся в функционально-конструктивном единстве.
Втулка 26 узла поворота 17 жестко связана с кронштейном 27. Подвес 30 вертикально смонтирован во втулке 26 с возможностью осевого вращения и связан с сервоприводом 29 через механизм 28. Хвостовик 23 держателя 18 неподвижно соединен с нижней торцевой частью подвеса 30. Искательная головка 14 зафиксирована на посадочном месте 25 соединителя 19 под цилиндром 21. При этом ось втулки 26 и продольная ось держателя 18 лежат на одной вертикальной координатной оси Y, которая геометрически делит ось X колес 20 пополам и перпендикулярна плоскости сканирования.
Кронштейн 27 измерительного модуля 2 подвижно связан с каркасом 7 каретки 6 через вертикальные направляющие 8 и пневмоцилиндр 9, причем конструкция кинематических звеньев устройства в ограниченном пределе обеспечивает неуправляемый ход модуля 2 по направляющим 8. Величина хода выбрана из условия превышения им размера максимально возможной неровности поверхности объекта инспекции, которую способно преодолеть шасси 16. Подшипниковые блоки 10 каретки 6 установлены на продольных направляющих перекладины балки 4. Портальная балка 4 находится на рельсовом пути 5. Таким образом кинематически конструкция установки представляет собой трехкоординатный манипулятор пространственного перемещения и вращения шасси 16 с искательной головкой 14.
Вычислитель 3 выполнен на основе компьютерного устройства, содержащего функциональный узел обработки измерительной информации, функциональный узел управления работой установки и командный пульт оператора.
ЭМАП искательной головки 14 электрически связан с функциональным узлом обработки измерительной информации вычислителя 3 через электронный блок 15 и сигнальный кабель в траке 13 соответствующего модуля 2.
Все электрические приводы установки, а также электронное оборудование в насосном шкафу 12, связаны с функциональным узлом управления вычислителя 3 через шкаф автоматики 11 и кабели в траках 13.
Пневмоцилиндры 9 связаны с оборудованием насосного шкафа 12 через трубки подачи сжатого воздуха.
Установка работает следующим образом.
Оператор дефектоскопа заносит в вычислитель 3 программу сканирования, подготовленную с учетом типа, размера и формы объекта инспекции, например сляба 31, вида выявляемых в нем дефектов. Подлежащий инспекции сляб 31 кладут горизонтально между рельсами 5 в рабочей зоне дефектоскопической установки.
Следуя заложенной программе вычислитель 3 выбирает для работы соответствующий измерительный модуль 2 и формирует команды движения для исполнительного устройства 1. Вычислитель 3 подает команды движения на приводы ходовой части балки 4 и перекатывает эту балку по рельсовому пути 5 для перемещения искательной головки 14 по первой горизонтальной координате. При этом вычислитель 3 также подает команды движения на приводы блоков 10 и двигает каретку 6 по направляющим перекладины балки 4 для перемещения искательной головки 14 по второй горизонтальной координате. После чего вычислитель 3 подает команды управления на насосное оборудование в шкафу 12 и приводит в действие пневмоцилиндр 9, который опускает активный измерительный модуль 2 вертикально вниз по направляющим 8 для перемещения искательной головки 14 по третьей координате из условия, чтобы по меньшей мере одно колесо 20 шасси 16 опиралось на поверхность сляба 31, а искательная головка 14 находилась в непосредственной близи от поверхности объекта инспекции на расстоянии, достаточном для установления акустического контакта ЭМАП с телом сляба 31. Давление внутри пневмоцилиндра 9 регулируют так, чтобы в дальнейшем пневмоцилиндр 9 не препятствовал свободному или упругому ходу модуля 2 вверх-вниз при наезде колес 20 на неровности поверхности сляба 31. Вычислитель 3 корректирует траекторию передвижения модуля 2 по данным, передаваемым системой определения пространственных координат модуля 2.
Затем проверяют ориентацию колесной оси X шасси 16. Если колеса 20 не выставлены согласно траектории сканирования, то вычислитель 3 подает управляющий сигнал на сервопривод 29, который приводит в движение механизм 28 для вращения подвеса 30 и хвостовика 23. Через держатель 18 вращение передают на цилиндр 21, полуоси 22 и колеса 20. Далее вычислитель 3 приводит в действие ЭМАП искательной головки 14 для излучения зондирующего сигнала. С датчика снимают полезный сигнал и передают его в электронный блок 15 для первичной обработки, после чего пересылают данные измерительной информации в вычислитель 3 для дальнейшего анализа с целью калибровки установки. Проведя калибровку вычислитель 3 переводит автоматику установки в режим выявления дефектов в слябе 31.
Для начала сканирования вычислитель 3 приводит в движение исполнительное устройство 1, посредством которого к модулю 2 прилагает толкающее или тянущее усилие в горизонтальной плоскости. При этом воздействие передают через узел 17 на держатель 18 и основание шасси 16. Под действием приложенной к шасси 16 силы приводят в движение колеса 20, в результате чего измерительный модуль 2 перекатывают по поверхности сляба 31 в выбранном направлении, удерживая держатель 18 строго вертикально при помощи узла 17, причем исполнительное устройство 1 ограничивает свободное перемещение измерительного модуля 2 возможностью движения данной части установки по нормали к плоскости сканирования в заданном пределе. В процессе работы вычислитель 3 синхронизирует передвижение балки 4, каретки 6 и вращение держателя 18 из условия, чтобы колеса 20 всегда были ориентированы по ходу кронштейна 27, направление которого предпочтительно задают вдоль или поперек сляба 31, даже в случае, если сляб 31 положен в рабочей зоне неровно, и угол скрещивания в плане продольных осей сляба 31 и балки 4 отличен от 0 или 90 градусов.
При наезде колеса 20 на препятствие в виде неровности поверхности сляба 31, в частности на крупную частицу окалины, под действием силы трения колесо 20, а вместе с ним шасси 16 и весь модуль 2 подается вверх, выбирая свободный ход исполнительного устройства 1 по вертикальной координатной оси Y. Благодаря своему расположению под осью колес 20 искательная головка 14 поднимается за счет силы трения, а после прохождения выступающей неровности опускается вертикально вниз под действием гравитации точно на ту же величину, что и колесо 20, следуя рельефу поверхности сляба 31 в рабочей зоне ЭМАП. Таким образом, шасси 16 осуществляет следящее действие, посредством которого установка выдерживает постоянным рабочий зазор между ЭМАП и поверхностью объекта инспекции в процессе его сканирования.
В точках изменения направления сканирования колеса 20 поворачивают по заданной программе аналогично тому, как это происходит при начальном выставлении колес 20 на траектории. В непосредственной близи или на самом краю сляба 31 шасси 16 останавливают. Шасси 16 и головку 14 поворачивают на месте с вывешиванием одного из колес 20 за край сляба 31. Затем перемещают шасси 16 с опорой на одно колесо 20 и подвес 30, посредством которого установка удерживает держатель 18 строго вертикально. Подвес 30 сохраняет устойчивость благодаря связи с рельсовым путем 5 через втулку 26, кронштейн 27, элементы каретки 6 и портальную балку 4, соединения которых не допускают отклонения подвеса 30 от нормали к плоскости объекта инспекции. После этого осуществляют возврат вывешенного колеса 20 на поверхность объекта инспекции 31 и продолжают движение по траектории сканирования. В результате покрывают всю площадь сляба 31 сканированием с траекторией, в частности типа «меандр», которую проходит искательная головка 14 за рабочий цикл установки в отношении каждого объекта инспекции 31 при потоковом контроле в промышленных условиях (фиг. 11).
Благодаря тому, что искательная головка дефектоскопа закреплена посередине одноосного шасси с опорными колесами, возможность хода измерительного модуля по вертикали обеспечивает эффективную работу шасси как следящего устройства данного модуля даже при контакте всего одного колеса шасси с поверхностью прикраевой зоны объекта контроля.
Для большего увеличения эффективности следящего устройства целесообразно выполнение ходовой части модуля с поворотным держателем, который характеризуется вертикальным расположением своего хвостовика оппозитно искательной головке относительно колесной оси, так как обеспечиваемый такой конструкцией вертикальный ход модуля способен отрабатывать неровности поверхности объекта инспекции без возникновения значительных тангенциальных сил, которые были бы способны отклонить головку от нормального рабочего положения и вызвать этим появление паразитного клиновидного зазора с поверхностью объекта.
Включение в состав конструкции установки узла поворота одноосного колесного шасси, посередине ходовой части которого закреплена искательная головка дефектоскопа, на месте, позволяет обеспечить опору измерительному модулю даже на самой кромке объекта инспекции, в том числе и при развороте шасси с вывешиванием одного из двух опорных колес, так как если искательная головка находится над объектом инспекции, то всегда по меньшей мере одно колесо шасси сохраняет свою опорную способность, что предотвращает сход модуля с края объекта инспекции.
В еще большей степени повышение опорной способности шасси модуля при повороте на кромке объекта инспекции достигается благодаря выполнению колес с профилем, который характеризуется цилиндрической поверхностью катания и сопряженной с ней конусной боковой частью обода с наружной стороны колес. За счет скошенных к наружным сторонам ободам колес, даже при выходе искательной головки за край объекта инспекции при развороте колес, верхняя кромка края объекта инспекции не является непреодолимым препятствием для ходовой части шасси измерительного модуля, так как энергия вращения ходовой части шасси модуля вокруг вертикальной оси координат будет преобразована в подъем шасси модуля вверх за счет скольжения конусной боковой части обода колеса по кромке края объекта инспекции, что позволит вернуть шасси модуля на верхнюю поверхность объекта инспекции. В результате ходовая часть шасси модуля сохраняет свою опорную способность даже при таком неблагоприятном случае.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сканирования объекта инспекции по площади и установка для его осуществления | 2022 |
|
RU2782504C1 |
| Измерительный модуль дефектоскопа и его следящее шасси | 2022 |
|
RU2778492C1 |
| Способ промышленной ультразвуковой диагностики вертикально ориентированных дефектов призматической металлопродукции и устройство для его осуществления | 2015 |
|
RU2651431C1 |
| ЗЕРКАЛЬНО-ТЕНЕВОЙ СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ С РАЗНОСТНОЙ КОМПЕНСАЦИЕЙ МЕШАЮЩИХ ФАКТОРОВ | 2014 |
|
RU2560753C1 |
| Способ ультразвукового контроля поверхностных и подповерхностных дефектов металлопродукции и устройство для его осуществления | 2016 |
|
RU2644438C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ КАЛИБРОВКИ УЛЬТРАЗВУКОВОГО ДЕФЕКТОСКОПА | 2014 |
|
RU2550825C1 |
| УСТАНОВКА ДЛЯ АВТОМАТИЗИРОВАННОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНЫХ КОЛЕС | 2024 |
|
RU2823048C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 2007 |
|
RU2371340C2 |
| СЛЕДЯЩЕ-СТАБИЛИЗИРУЮЩЕЕ УСТРОЙСТВО СКОРОСТНОГО ВАГОНА-ДЕФЕКТОСКОПА | 2014 |
|
RU2581343C2 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ЛИСТОВОГО ПРОКАТА | 2005 |
|
RU2298180C2 |

Использование: для дефектоскопического сканирования. Сущность изобретения заключается в том, что установка для дефектоскопического сканирования содержит ведущее исполнительное устройство и ведомый измерительный модуль с ходовой частью, посередине которой закреплена искательная головка дефектоскопа, при этом установка выполнена с возможностью хода модуля по вертикали, содержит узел поворота ходовой части модуля на месте, при этом ходовая часть выполнена в виде одноосного шасси с опорными колесами. Технический результат: обеспечение возможности предотвращения схода измерительного модуля дефектоскопа с края объекта инспекции и увеличение надежности неразрушающего контроля прикромочной зоны. 2 з.п. ф-лы, 11 ил.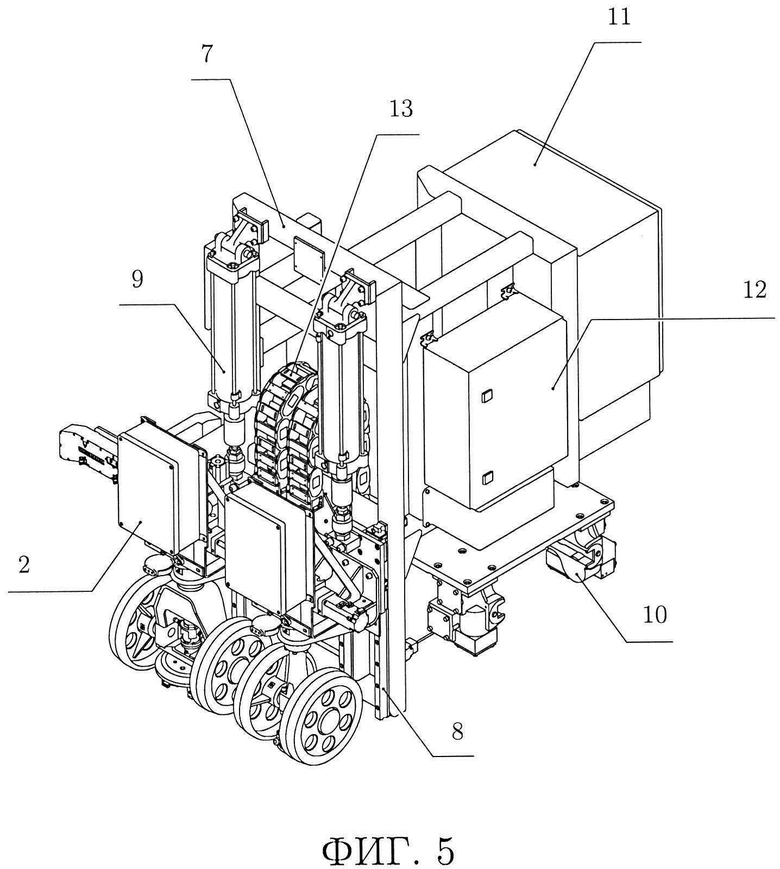
1. Установка для дефектоскопического сканирования, содержащая ведущее исполнительное устройство и ведомый измерительный модуль с ходовой частью, посередине которой закреплена искательная головка дефектоскопа, отличающаяся тем, что выполнена с возможностью хода модуля по вертикали, содержит узел поворота ходовой части модуля на месте, при этом ходовая часть выполнена в виде одноосного шасси с опорными колесами.
2. Установка по п. 1, отличающаяся тем, что ходовая часть измерительного модуля содержит поворотный держатель, выполненный с вертикальным хвостовиком, через который ходовая часть связана с исполнительным устройством, причем указанный хвостовик расположен оппозитно искательной головке дефектоскопа относительно колесной оси.
3. Установка по п. 1, отличающаяся тем, что профиль колес ходовой части характеризуется цилиндрической поверхностью катания и сопряженной с ней конусной боковой частью обода с наружной стороны колеса.
| WO 2017123112 A1, 20.07.2017 | |||
| DE 3049065 A1, 01.07.1982 | |||
| CN 102809608 A, 05.12.2012 | |||
| Вибрационная печь | 1986 |
|
SU1394011A2 |
| CN 103063743 A, 24.04.2013 | |||
| Патрон для метчиков | 1937 |
|
SU54199A1 |
| Устройство для автоматизированного ультразвукового контроля сварного шва | 1989 |
|
SU1663536A1 |
| ЗАКРЫТАЯ ДИЗЕЛЬНАЯ ФОРСУНКА С ГИДРОМЕХАНИЧЕСКИМ ЗАПИРАНИЕМ ИГЛЫ | 0 |
|
SU195253A1 |
| СЛЕДЯЩЕ-СТАБИЛИЗИРУЮЩЕЕ УСТРОЙСТВО СКОРОСТНОГО ВАГОНА-ДЕФЕКТОСКОПА | 2014 |
|
RU2581343C2 |

