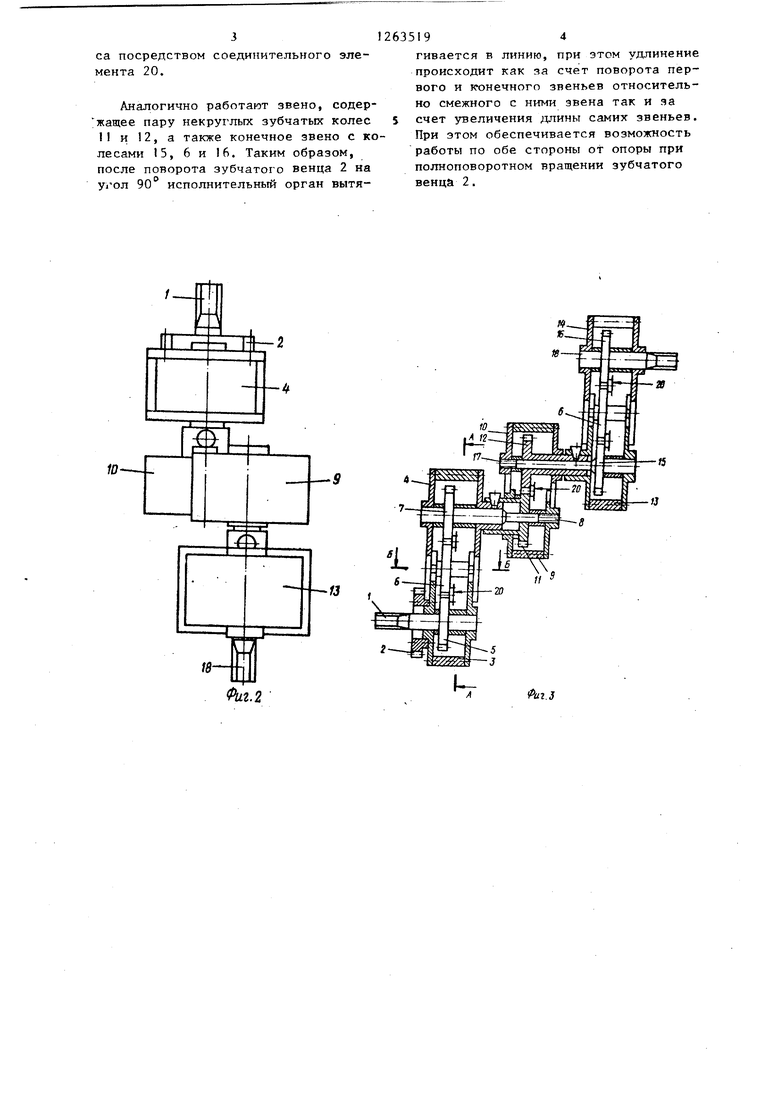
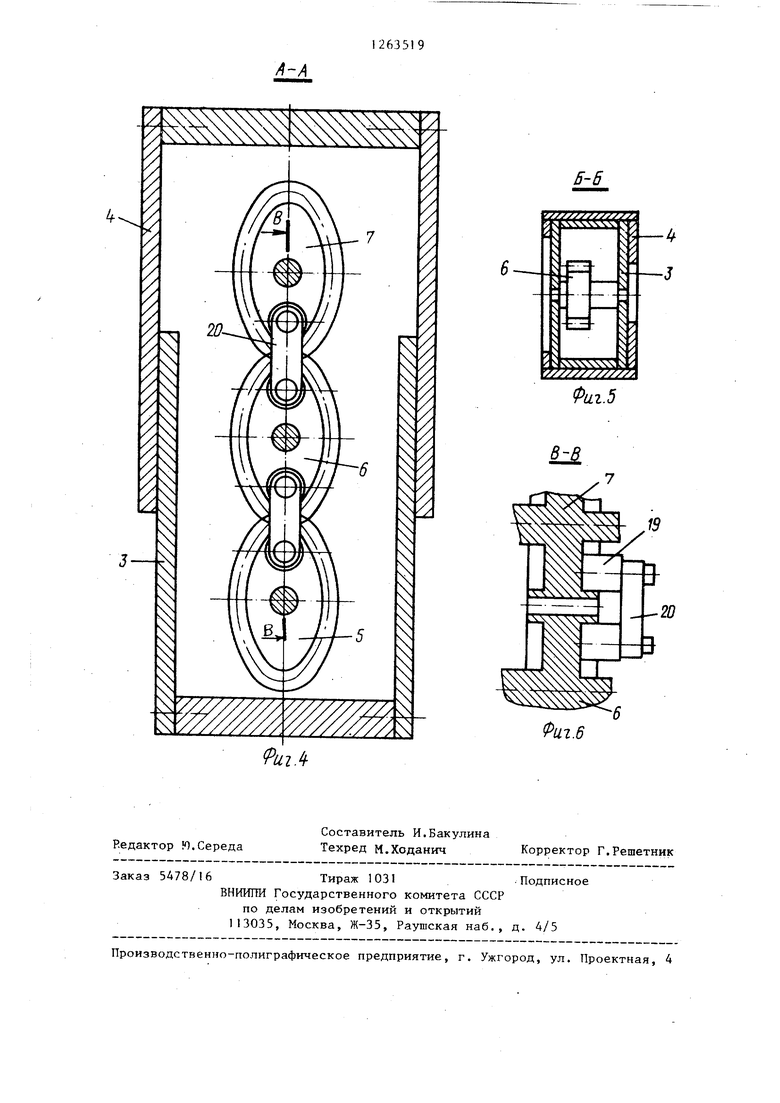
Изобретение относится к машиностроению, а более конкретно к манипу ляторам для механизации и автоматиза ции технологических процессов, содер жащих подъемно-транспортные и другие операции. Цель изобретения - расширение зоН1 1 обслуживания, за счет увеличения длины звеньев при повороте звеньев одно относительно другого. На фиг.1 схематически показан исполнительный орган манипулятора, вид спереди; на фиг.2 - то же, вид сверху; на фиг.З - продольный разрез, соответствующий максимальной длине; на фиг.4 - сечение А-А на фиг.З (мас штаб увеличен); на фиг.5 - сечение Б-Б на фиг.З; на фиг.6 - разрез В-В на фиг.4 (масштаб увеличен). Исполнительный орган манипулятора содержит основание (не показано) и вал 1, зубчатый.венец 2, закрепляемый на основании, связан с приводом (не показан), а также с корпусом зве на, выполненного из двух частей внут ренней 3 и наружной 4, которые имеют возможность их относительного линейного перемещения. В корпусе установлены находящиеся в зацеплении некруг лые зубчатые колеса 5-7. Эти колеса должны быть вьтолнены с двумя взаимно перпендикулярными осями симметрии, а точка пересечения этих осей должна совпадать с осью вращения. Этому требованию удовлетворяют колеса эллиптической, овальной и им подобных форм. Некруглое зубчатое колесо 5 установлено во внутренней части корпуса 3 посредством оси, жестко связанной в свою очередь с валом I. Ось средне го некруглого зубчатого колеса 6 сво бодно расположена в оппозитных пазах внутренней части корпуса 3 и не имеет возможности случайного смещения колеса 6 в поперечном (радиальном) направлении. Вал 8 жестко связан с корпусом смежного звена, также выполненного из двух частей внутренней 9 и наружной 10, с возможностью их относитель ного линейного перемещения. В конусе звена расположены некруглые зубчатые колеса 11 и 12, оси вращения которых установлены на соответствующих частях корпуса. При этом ось звена I1 жестко связана с валом 8. 19 Конечное звено содержит внутреннюю 13 и наружную 14 части корпуса, и некруглые зубчатые колеса 15, 6 и 16. Вал 17 этого звена связан с наружной частью 10 корпуса смежного звена, вал колеса 12 - с корпусом конечного звена, а вал 18 колеса 16с рабочим органом (не показан). Таким образом, дпя правильного функционирования механизма некруглые зубчатые колеса должны быть эллиптической, овальной или подобной формы они должны быть установлены так, что в точке сопряжения исходных контуров радиусы кривизны одинаковы, в преде- ; лах одного звена зубчатые колеса должны быть аналогичными, число колес в звеньях должно быть нечетным, а в промежуточном звене их число четное. В каждом звене смежные некруглые зубчатые колеса связаны между собой роликами 19, взаимодействующими с роликами беговыми дорожками, выполненными по крайней мере с одной стороны каждого некруглого зубчатого колеса, профиль которой эквидистантен профилю этого колеса. Пара роликов 19 шарнирно установлена на соединительном элементе 20. Исполнительный орган мгшипулятора работает следующим образом. При закрепленном валу 1 и повороте зубчатого венца 2 от привода вращаются скрепленные с ним внутренняя 3 и наружная 4 части корпуса первого звена. В связи с тем, что некруглое зубчатое колесо 5, закрепленное на валу 1 остановлено, происходит обкат колеса 6 по колесу 5, а колеса 7 по колесу 6. Эти колеса установлены так,, что в любой момент времени в точке сопряжения исходных контуров радиусы кривизны смежных колес одинаковы. Кроме того, колеса имеют две перпендикулярные оси симметрии и их ось вращения совпадает с точкой пересечения этих осей симметрии. Ввиду изложенного угловые скорости валов 1 и 8 одинаковы, а поворот звена сопровождается увеличением его длины. Общее удлинение складьшается из эксцентриситетов колес 5-7. При работе механизма кинематическая связь обеспечивается при обкатьшании роликов 19 по закраинам колес, при этом пара роликов связывает смежные колеса посредством соединительного элемента 20. Аналогично работают звено, содер жащее пару некругльгх зубчатых колес II и 2, а также конечное звено с кО лесами 15, 6 и 16. Таким образом, после поворота зубчатого венца 2 на угол 90 исполнительный орган вытя194гивается в линию, при этом удлинение происходит как за счет поворота первого и конечного звеньев относительно смежного с ними звена так и яа счет увеличения длины самих звеньев. При этом обеспечивается возможность работы по обе стороны от опоры при полноповоротном вращении зубчатого венца 2.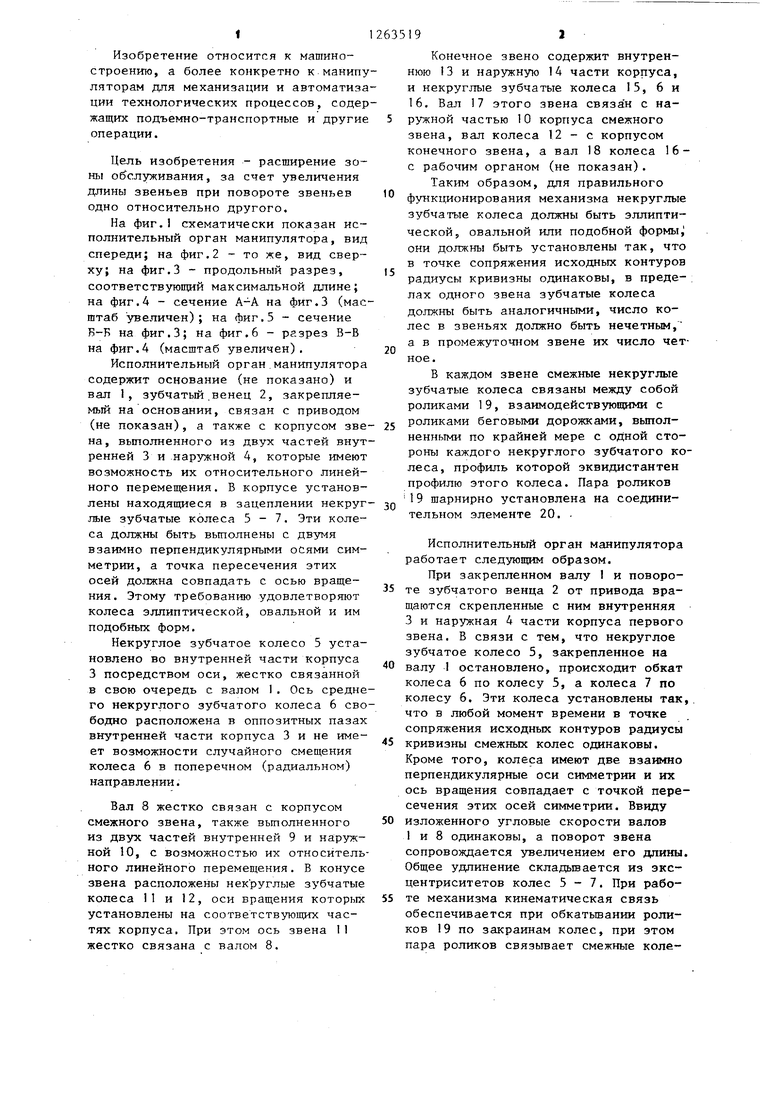
| название | год | авторы | номер документа |
|---|---|---|---|
| Приводное устройство манипулятора | 1980 |
|
SU868194A1 |
| Привод канатно-угольной пилы | 1984 |
|
SU1191577A1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| ПЛАНЕТАРНЫЙ ВИБРАТОР НАПРАВЛЕННЫХ КОЛЕБАНИЙ | 2024 |
|
RU2829481C1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2007 |
|
RU2416747C2 |
| БЕСШАТУННЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 2007 |
|
RU2345259C1 |
| Исполнительный орган манипулятора | 1987 |
|
SU1426777A1 |
| Привод манипулятора | 1982 |
|
SU1144877A1 |
| Манипулятор | 1990 |
|
SU1787761A1 |
ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА, содержащий шарнирно соединенные и кинематически связанные меткду собой звенья, причем первое звено шарнирно связано с основанием и установлено с возможностью поворота относительно него, а конечное звено снабжено рабочим органом, при этом каждое звено вьшолнено в виде корпуса с расположенными в нем кинематическими передачами, а также привод относительного перемещения звеньев, отличающийся тем, что, с целью расширения зоны обслуживания, корпус каждого звена состоит из двух частей, установленых с возможностью относительного линейного перемещения, причем на внутренней поверхности одной из этих частей корпуса оппозитно вьтолнены продольные пазы, а кинематические передачи звеньев вьтолнены в виде некруглых зубчатых колес с двумя взаимно перпендикулярными осями симметрии, причем ось вращения каждого колеса совпадает с точкой пересечения их осей С1пчметрии, оси вращения крайних колес установлены на соответствующих частях корпуса, а ось среднего колеса свободно расположена в оппозитных пазах части корпуса, при этом каждое некруглое зубчаСО тое колесо по крайней мере с одной стороны имеет внутреннюю беговую дорожку, профиль которой эквидистантен профилю этого колеса, а в каждом звене смежные некруглые зубчатые колеса связаны между собой роликами, взаимодействующими с их беговыми дорожками, при этом ролики шарнирно установлены на соединительном элементе.
| Манипулятор | 1978 |
|
SU763080A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
