.Г-/5
N
Ю
О5
Изобретение относится к машинострое- ;нию, а именно к манипуляторам для ме- ;ханизации технологических процессов, содер- |жа1.цих подъемно-транспортные и другие {операции.
Цель изобретения - повышение грузоподъемности и жесткости.
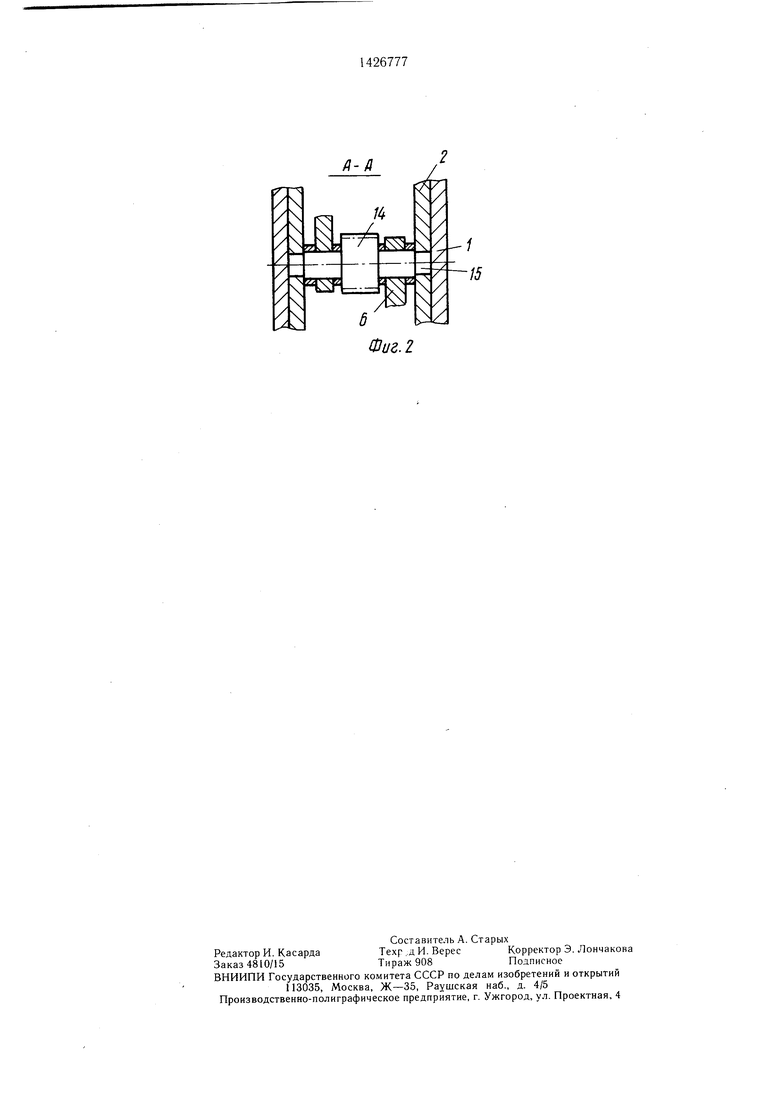
На фиг. 1 изображен исполнительный орган манипулятора, продольный разрез; на :фиг. 2 - сечение А-А на фиг. 1. : Исполнительный орган манипулятора со- держит корпус, выполненный телескопичес- JKHM из двух частей: первая (наружная) |часть 1 корпуса является входным звеном, :вторая (внутренняя) часть 2 корпуса - вы- ;ходным звено.м. При этом части корпуса установлены с возможностью взаимного ;Продольного перемещения.
К наружной части корпуса крепится кронштейн 3, с которым шарнирно связаны звенья 4-6, образующие многозвенный :щарнирно-рычажный механизм типа «нюрн- :брегские ножницы. Последняя пара звеньев 6 этого механизма связана посредством общей оси с внутренней частью корпуса (фиг. 2).
На наружной части 1 корпуса закреплен силовой привод 7, к щтоку которого крепится клин 8, одна из сторон которого снабжена рейкой 9, а противоположная опирается на кронштейн 3 с возможностью перемещения. Рейка 9 кинематически связана с зубчатым колесом 10, шарнирно связанным с осью 11 шарнирно-рычажного механизма, расположенной в средней части звеньев 5, т. е. на центральной оси. С колесом 10 связана зубчатая рейка 12 симметричного клина 13.
Система взаимодействующих клиньев 8 и 13 с рейками 12 и зубчатых колес 10 образует клинозубчатый механизм, причем смежные клинья установлены по противоположным сторонам относительно середин звеньев 5. Последнее зубчатое колесо 14 кинематической цепи снабжено полуосями 15 щарнирно связанными с внутренней частью корпуса, на котором выполнено отверстие 16, предназначенное для закрепления рабочего органа манипулятора (не показан).
Исполнительный орган манипулятора работает следующим образом.
При выдвижении штока силового привода 7 клин 8 перемещается относительно кронщтейна 3 вверх (фиг. 1). При этом рейка 9 поворачивает первое зубчатое колесо 10 по часовой стрелке. Это вращение вызывает смещение связанного с первым колесом 10 первого симметричного клина 13 вниз.
Второе колесо 10 (считая слева направо) поворачивается против часовой стрелки. При
этом второй (считая слева) клин 13 перемещается вверх.
Таким образом, нечетные зубчатые колеса 10 вращаются по часовой стрелке,
четные колеса 10 - против часовой стрелки, нечетные клинья 13 смещаются вниз, а четные. - вверх, что приводит к перемещению внутренней части корпуса относительно наружной части корпуса и к удлинению устройства в целом. Роль шарнирно-рычажного механизма сводится здесь только к кинематической связи между собой клиньев 8 и 13 и зубчатых колес 5 и 6, а все усилия воспринимаются клинозубчатым механизмом.
5 При уборке щтока силового привода 7 картина будет обратной: клин 8 смещается вниз, нечетные зубчатые колеса 10 вращаются против часовой стрелки, а четные колеса 10 - по часовой стрелке, нечетные клинья 13 движутся вверх, а чет0 ные - вниз, что приводит к втягиванию внутренней части корпуса в наружную часть корпуса.
Исполнительное устройство манипулятора обладает повышенной грузоподъемностью
5 и жесткостью конструкции, обеспечивает пропорциональную зависимость хода выходного звена от перемещения силового привода.
Формула изобретения
0 Исполнительный орган манипулятора, содержащий корпус, ролики, подвижные клинья, взаимодействующие с роликами и привод, выполненный в виде силового цилиндра, отличающийся тем, что, с целью повышения грузоподъемности и жесткости,
5 он снабжен двумя многозвенными шар- нирно-рычажными механизмами, установленными параллельно друг другу и имею- тцими общие оси шарниров соединения, а корпус выполнен телескопическим из двух частей, причем первая ось шарнира соеди0
нения многозвенников, расположенная на
центральной оси, связана с первой частью корпуса, а последняя ось шарнира соединения многозвенников - с второй частью корпуса, при этом на промежуточных осях
с шарниров соединения многозвенников закреплены ролики, на образующих которых выполнены зубчатые венцы, взаимодействующие с дополнительно введенными зубчатыми рейками, закрепленными на боковых поверхностях клиньев, установленных на крайних
0 осях шарниров соединения многозвенного шарнирно-рычажного механизма, с возможностью перемещения, причем первый клин связан с приводом и первой частью корпуса, а последний - с второй частью корпуса.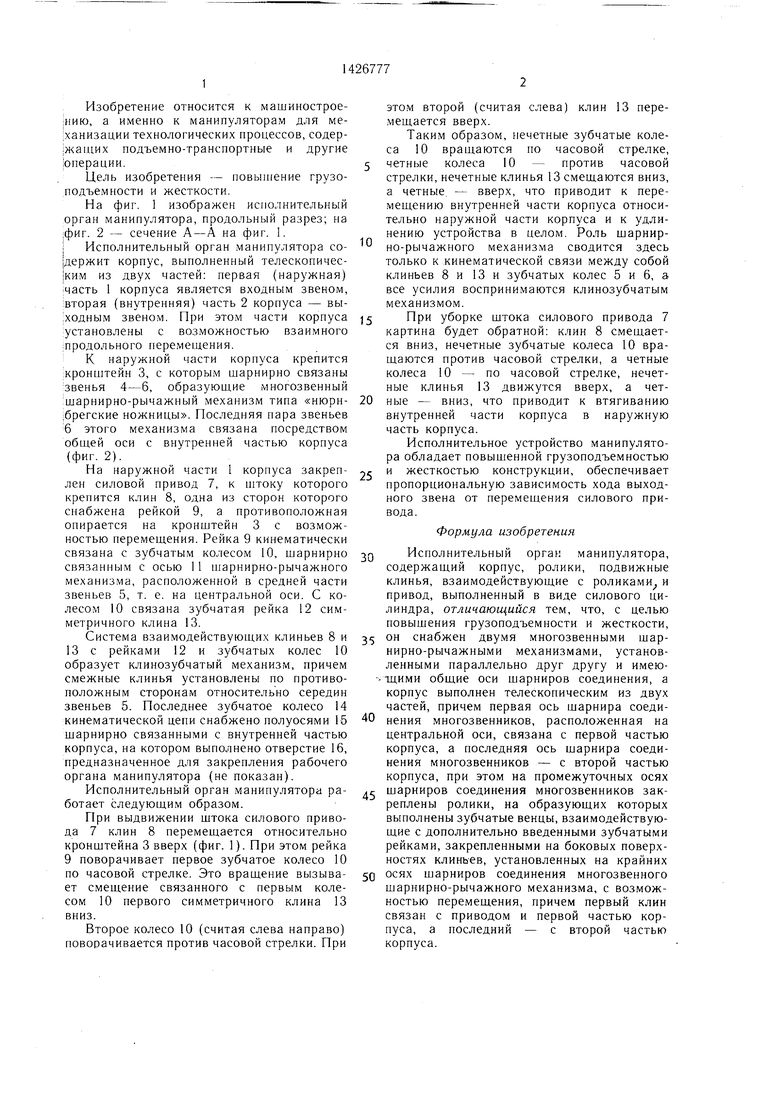
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1284820A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2344031C2 |
| Исполнительный орган манипулятора | 1984 |
|
SU1238960A1 |
| Шпаговый манипулятор | 2018 |
|
RU2691170C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438856C2 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Манипулятор | 1978 |
|
SU763080A2 |
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ НОЖА РЫБОРАЗДЕЛОЧНОЙ МАШИНЫ | 2011 |
|
RU2478293C1 |
Изобретение относится к машиностроению, а более конкретно к манипуляторам для механизации технологических процессов, содержащих подъемно-транспортные и другие операции. Целью изобретения является повышение грузоподъемности и жесткости за счет повышения жесткости в кинематической цепи. Корпус исполнительного органа манипулятора состоит из двух частей: первая (наружная) часть 1 корпуса является входным звеном, а вторая (внутренняя) часть 2 корпуса - выходным звеном, и эти части корпуса установлены с возможностью взаимного продольного переме- шения. Наружная и внутренняя части корпуса шарнирно связаны между собой звеньями, образующими многозвенный шар- нирно-рычажный механизм. На наружной части 1 корпуса закреплен силовой привод 7, к штоку которого крепится клин 8, одна из сторон которого снабжена рейкой 9, а противоположная опирается на кронштейн 3 с возможностью перемещения. Система взаимодействующих клиньев 8 и 13 с рейками 12 и зубчатых колес 10 образует клинозубчатый механизм, причем смежные клинья установлены по противоположным сторонам относительно середины звеньев 5. 2 ил. (О (Л
Фиг.2
| Привод манипулятора | 1980 |
|
SU898185A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
