1
Изобретение относится к области ма- шиностроения, в частности к манипуляторам, предназначенным оля механизации технологических продессов, соцержаь щих подъемно-транспортные и другие операции.
По основному авторскому свидетельству № 659376 известен манипулятор, содержащий многозвенный исполнительный орган, звенья которого шарнирно сочленены и кинематически связаны между собой и с оснсжанием, при этом первое звено связано с приводом, а последнее - с захватом, причем каждое последующее звено смонтировано на предыдущем с возможностью относительного П4жорота в шарнире сочленения, входное звено цепи кинематической связи жестко закреплено на основании, а выходноена захвате1.
Недостатком известной ксиструкции является то, что она не обладает зна чительной грузоподъемностью в достаточной химической жесткостью вследствие того, что вал первого от опоры звена испытывает комбинированные нагрузки, величина которых прогрессирует с увеличением числа звеньев.
Целью настояш.его изобретения является увеличение грузоподъемности и кинематической жесткости.
Указанная цель достигается тем, что каждый шарнир сочленения звеньев снабжен парой одинаковых шестерен, а на
10 всех участках кинематической цепи смежные звенья имеют передаточное отношение, равное единице.
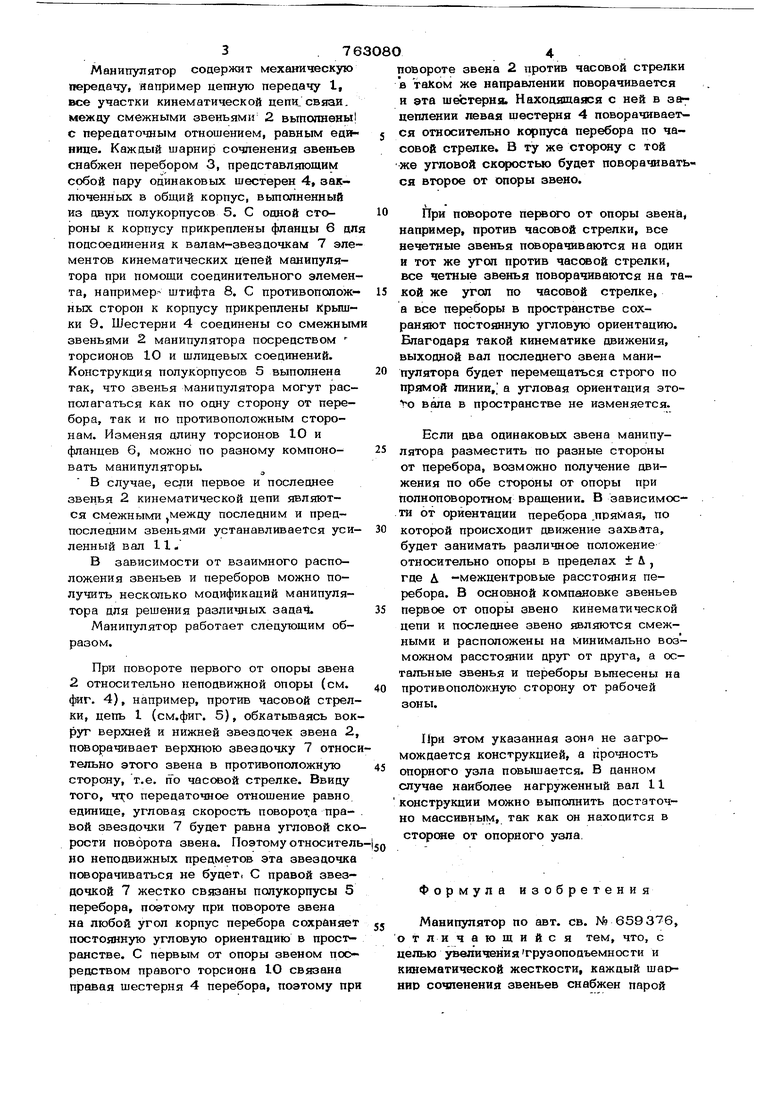
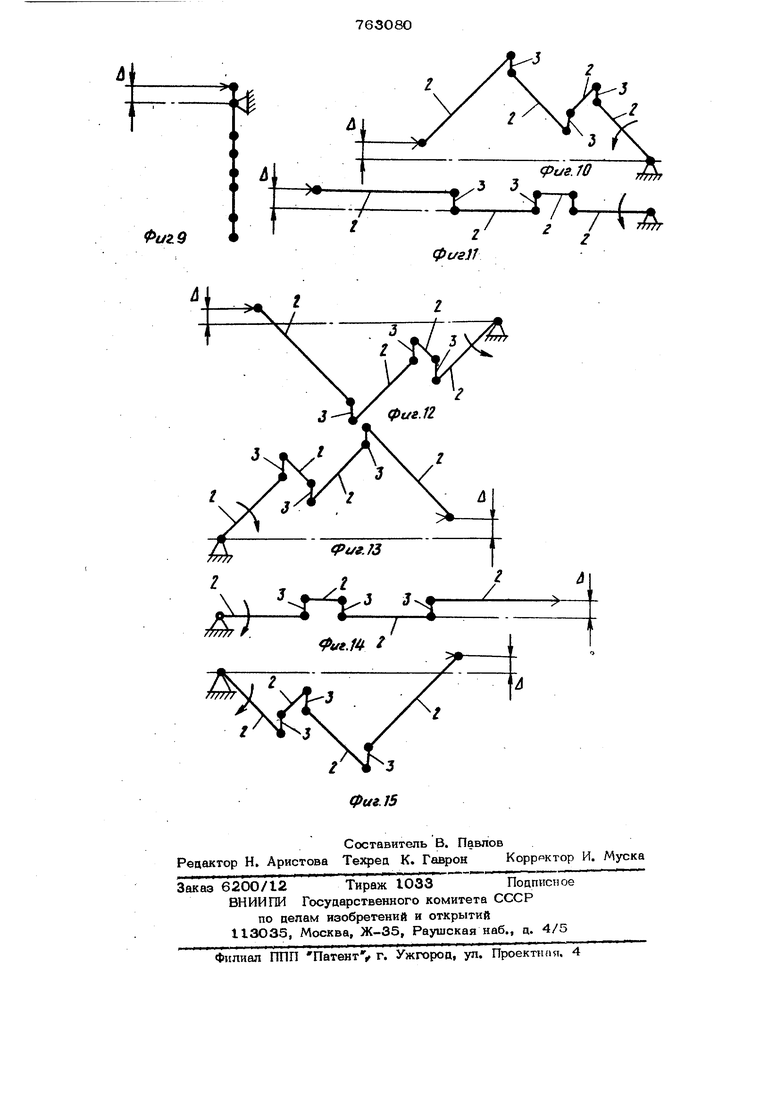
На фиг, 1 изображен общий вид манипулятора;на фиг. 2 - то же, вид в
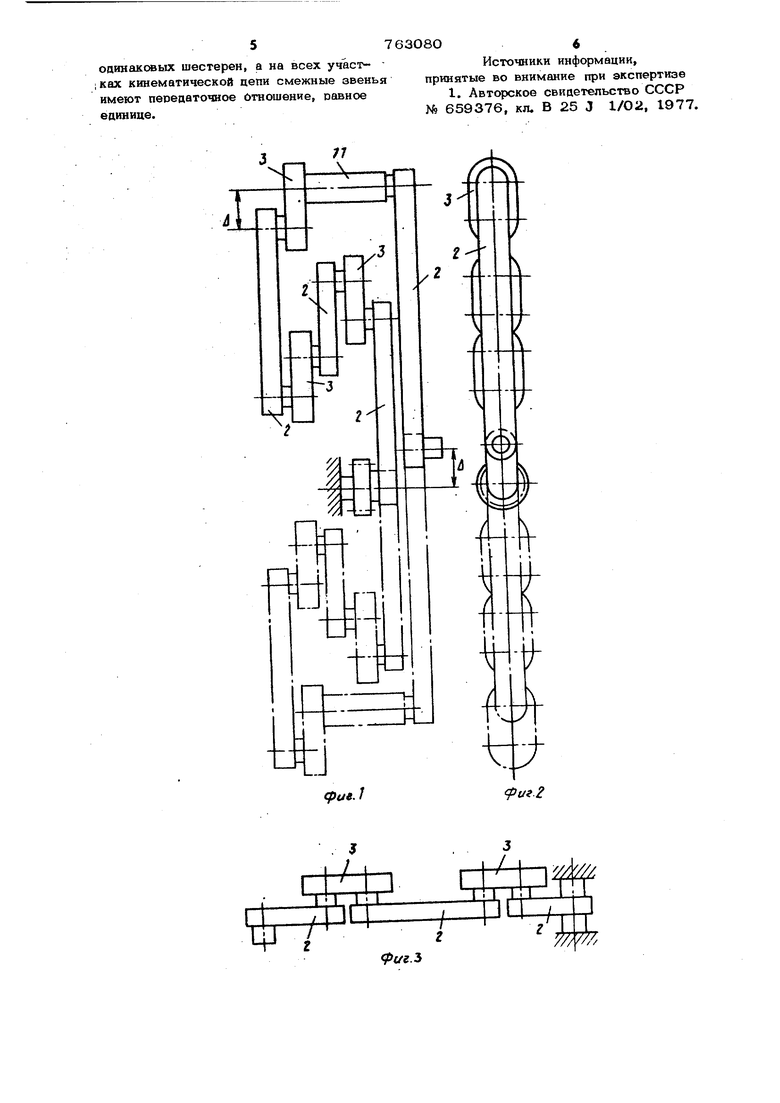
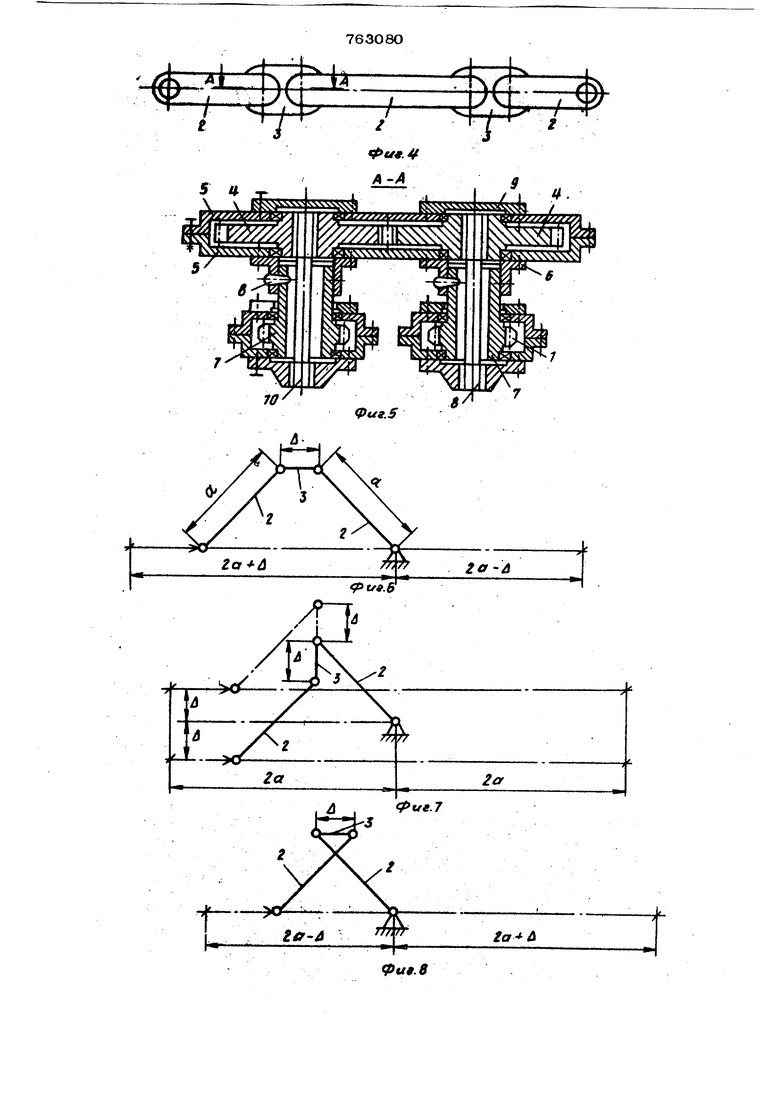
ts плане;на фиг. 3 - общий вид манипуляторй, вариант с односторонним расположением звеньев;на фиг. 4 - то же, виц в плане; на фиг. 5 - разрез А-А на фиг. 4jHa фиг. 6 - схема цвухзвенного ва20рианта манипулятора;на фиг. 7 и 8 - то же, в работе;:на фиг. 9 - схема четырехзвенного варианта манипулятора; на I фиг. 10-15 - то же, моменты работы.
Манипулятор содержит механическую передачу, например цепную передачу 1, все участки кинематической цепи, связи, между смежными звеньями 2 выполнены с передаточным отношением, равным ед нице. Каждый шарнир сочленения звеньев снабжен перебором 3, представляющим собой пару одинаковых шестерен 4, заключенных в общий корпус, выполненный из двух полукорпусов 5. С одной стоРОНЫ к корпусу прикреплены фланцы 6 дл подсоединения к валам-звездочкам 7 элементов кинематических цепей манипулятора при помощи соединительного элемента, например- штифта 8, С противопопожных сторон к корпусу прикреплены Крьпики 9. Шестерни 4 соединены со смежным звеньями 2 манипулятора посредством торсионов 10 и шлицевых соединений. Конструкция полукорпусов 5 выполнена так, что звенья манипулятора могут располагаться как по одну сторону от перебора, так и по противоположным сторонам. Изменяя длину торсионов Ю и фланцев 6, можно по разному компоновать манипуляторы.
В случае, если первое и последнее звенья 2 кинематической цепи являются смежными ,между последним и предпоследним звеньями устанавливается усиленный вал 11.
В зависимости от взаимного расположения звеньев и переборов можно получить несколько модификаций манипулятора для решения различных
Манипулятор работает следующим образом.
При повороте первого от опоры звена 2 относительно неподвижной опоры (см. фиг, 4), например, против часовой стрелки, цепь 1 (см.фиг. 5), обкатьшаясь вокруг верхней и нижней звездочек звена 2, пснворачивает верхнюю звездочку 7 относительно этого звена в противоположную сторону, т.е. tifo чассжой стрелке. Ввиду того, чт;о передаточное отношение равно единице, угловая скорость поворота правой звездочки 7 будет равна угловой скорости поворота звена. Поэтому относительно неподвижных предметов эта звездочка поворачиваться не будет, С правой звездочкой 7 жестко связаны попукорпусы 5 перебора, поэтому при повороте звена на любой угол корпус перебора сохраняет посто$шную угловую ориентацию в прост ранстве. С первым от опоры звеном посредством правого торсиона 10 связана правая шестерня 4 перебора, поэтому при
повороте звена 2 против часовой стрелки в таком же направлении поворачивается и эта шестерня. Находящаяся с ней в зацеплении левая шестерня 4 поворачивается относительно ксзрпуса перебора по часовой стрелке. Б ту же сторшу с той же угловой скс юстью будет поворачиватся второе от опоры звено.
При пс ороте первого от опоры например, против чассжой стрелки, все нечетные звенья поворачиваются на один и тот же угол против чассжой стрелки, все четные звенья поворачиваются на такой же угол по часовой стрелке, а все переборы в пространстве сохраняют постоянную угловую ориентацию. Благодаря такой кинематике движения, выходной вал последнего звена манипулятора будет перемещаться строго по прямой линии, а угловая ориентация этоvo вала в пространстве не изменяется.
Если два одинаковых звена манипулятора разместить по разные стороны от перебора, возможно получение движения по обе стороны от опоры при полноповоротном вращении. В зависимости от ориентации перебора .прямая, по которой происходит движение захвата, будет занимать различное положение относительно опоры в пределах ± Д , где А -межцентровые расстояния перебора. В основной компановке звеньев первое от опоры звено кинематической цепи и последнее звено являются смежными и расположены на минимально возможном расстоянии друг от друга, а остальные звенья и переборы вынесены на противоположную сторону от рабочей зоны.
При этом указанная зона не загромождается конструкцией, а прочность опорного узла повышается. В данном случае наиболее нагруженный вал 11 конструкции можно выполнить достаточно массивным, так как он находится в сторсие от опорного узла,
Формула изобретения
Манипулятор по авт. св. Ng 659376, отличающийся тем, что, с целью увеличениягрузоподъемности и кинематической жесткости, каждый шарнир сочленения звеньев снабжен парой
5763О8О4
одинаковых шестерен, а на всех участ- -Источники информации,
,ках кинематической цепи смежные звеньяпринятые во внимание при экспертизе
имеют передаточное Отношение, оавное1, Авторское свидетельство СССР
659376, кп. В 25 J 1/О2, 1977.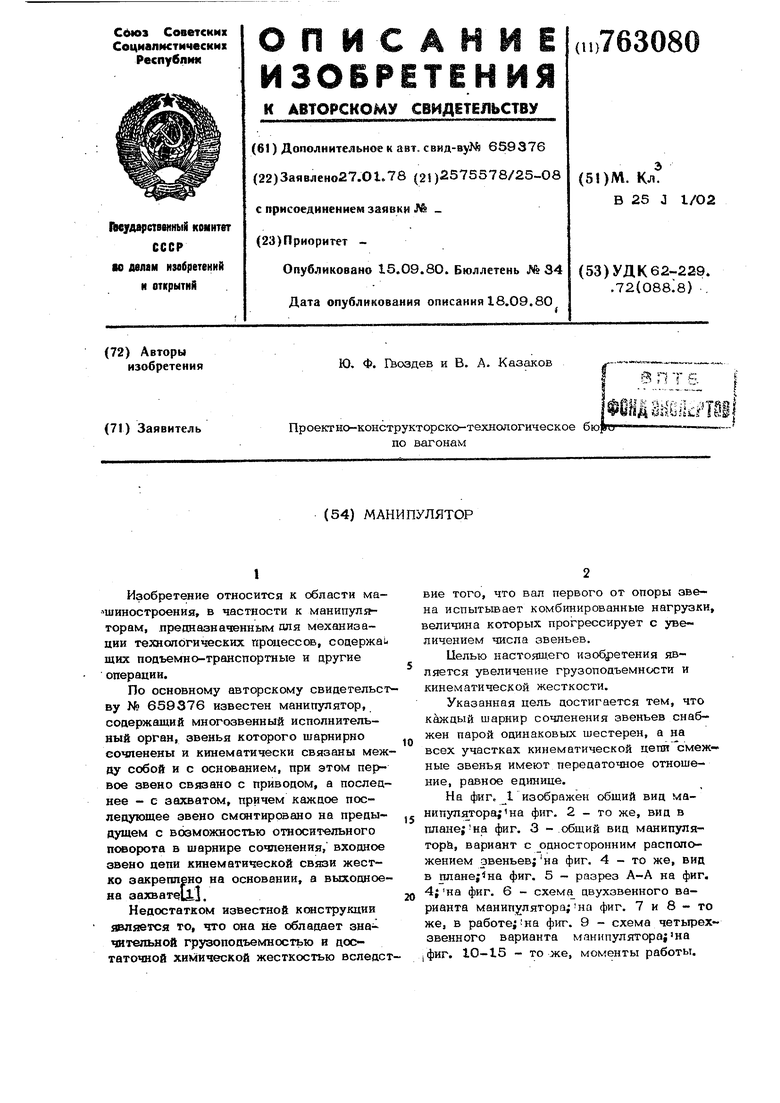
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU770780A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1050861A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Манипулятор | 1984 |
|
SU1273243A1 |
| Манипулятор | 1980 |
|
SU872248A2 |
| Манипулятор | 1977 |
|
SU659376A1 |
| Звездочный цепной вариатор Сидора | 1990 |
|
SU1802250A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ (ВАРИАНТЫ) | 1995 |
|
RU2115849C1 |
| ВЕТРОДВИГАТЕЛЬ | 1994 |
|
RU2095620C1 |
. /
vf
-Ч:
t
5 4
Л7
Фиг.5
