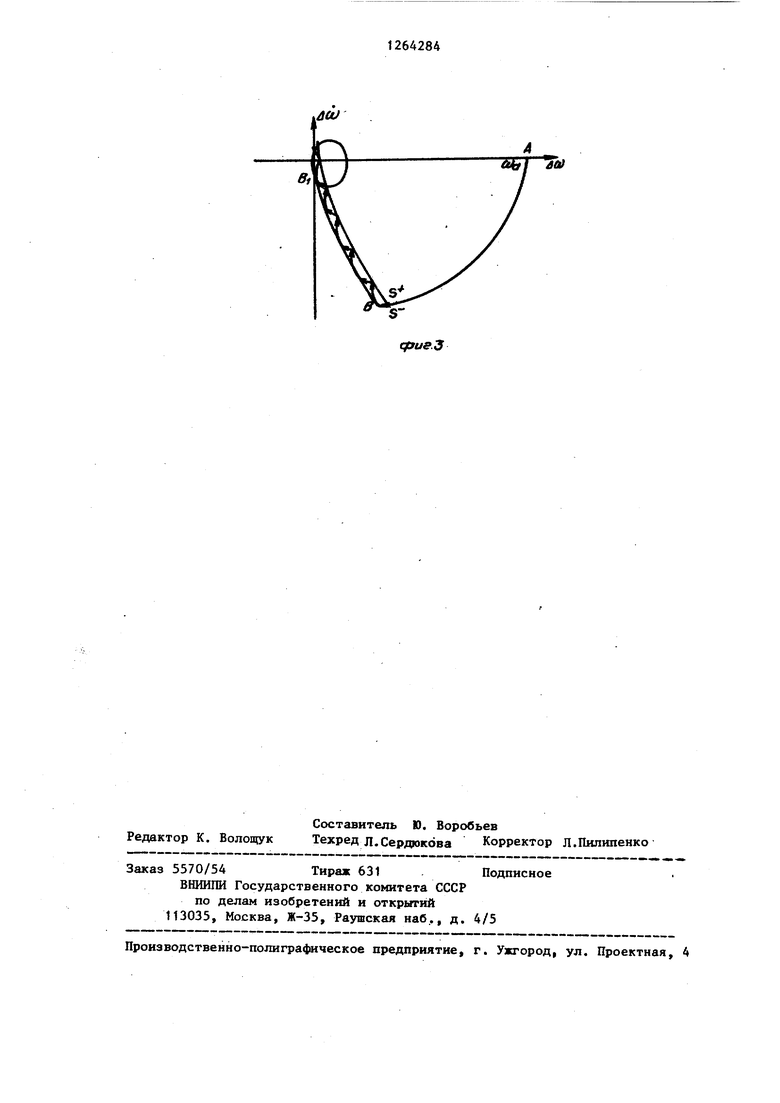
Изобретение относится к электротехнике и может быть использовано при разработке регуляторов скорости электроприводов широкого примене ния, работающих в режиме стабилизации частоты вращения, при частых изменениях величины сигнала задания и при воздействии резкоизменяющегося момента нагрузки. Целью изобретения является повышение быстродействия при сохранении апериодического вида переходного процесса в широком диапазоне частоты вращения и при отработке резкопереманной нагрузки. На,фиг.1 структурная схема устройства; на фиг.2 - блок формирования коэффициента на фиг.З изображение переходного процесса на фазовой плоскости. Устройство стабилизации частоты вращения двигателя постоянного тока (фиг.1) содержит двигатель 1 постоянного тока, представленный эк.вивалентной схемой, с валом которого сочленен вал датчика 2 частоты вр щения и вал датчика 3 ускорения. Последовательно с обмоткой двигателя 1 соединен датчик 4 тока, который может быть выполнен в виде низкоомного резистора. С датчика 4 тока сни мается сигнал напряжения, пропорциональный току, протекающему по обмотк двигателя 1. Выход датчика 2 частоты вращения подается на инверсный вход сумматора 5. Прямой вход сумматора 5 соединен с выходом блока 6 задания которое может быть выполнено в виде источника постоянного напряжения с регулируемым уровнем выходного сигн ла. Выход блока задания также подае ся на вход дифференцирующего звена 7. Выход сумматора 5 соединен с одним из входов блока 8 формирования коэффициента Тс.. С остальными входа ми блока 8 соединены выходы датчика 2 частоты вращения, датчика 3 ус корения и датчика 4 тока. Выход дат чика 3 ускорения также подается на инверсный вход сумматора 9. С прямы входом сумматора 9 соединен выход дифференцирующего звена 7. Выходы су матора 9 и блока В формирования коэффициента Т соединены с входами блока 10 умножения, выход jcoTopojr o подается на вход сумматора 11 ,с вторым входом которого соединен выход сумматора 5. Выход сумматора 11 сое 84 динен с входом релейного элемента 12, выход которого соединен с входом импульсного усилителя 13 мощности, формирующего на выходе разнополярные импульсы с амплитудой +U и -U. Выход импульсного усилителя 13 мощности соединен с обмоткой двигателя 1. Блок формирования коэффициента: формируе-Е коэффициент Т, равный RЭ((0|) 2(CeU+C lu |+R|Mj) л|г RXae-t-lauJi) i u()l) (C,U4Ct|u3|+R|MHl)J C,)|a|M/ где R - активное сопротивление оомотки двигателя, половина ширины петли гистерезиса релейного элементаj амплитуда выходного напряжения импульсного усилителя мощности; индуктивность обмотки двигателя;U)- частота вращения; момент нагрузки Тр - коэффициент при сигнале производной от ошибки по часто те вращения; дц)- ошибка по частоте вращения;коэффициент пропорциональНОСТ5Н между вращаюпщм момен том и током двигателя; момент инериян, приведенный к валу двигателя. Структурная схема блока формироваНИН коэффициента Т приведена на. 1Иг.2. Выходы источника 14 постоянного напряжения, уровень выходного .напряжения которого пропорционален величине ys , и блока 15 формирования абсолютного значения, вход которого соединен с выходом сумматора 5, подключены к входам сумматора 16. Выход сумматора 16 соединен с входом усилителя 17, коэффициент усиления которого пропорционален произведению RI. Выход усилителя 17 соединен с одним из входов блока 18 деления, к второму входу которого подключен выход сумматора 19. Входы сумматора 19 связаны с входами блока 20 формирования абсолютного значения, вход которого связан с выходом усилителя 21j имеющего коэффициент усилешя, пропорциональный величине 2С, источника 22 постоянного йапряжения, уровень выходного напряжения которого пропорционален произведению 2CgU, и блока 23 формирования абсолютного значения сигнала, пропорционального моменту нагрузки, вход которого связан с выходом усилителя 24, имеющего коэффициент усиления, пропорциональный величине 2R Вход усилителя 24 соединен с выходом сумматора 25, прямой вход которого соединен с выходом усилителя 26, имеющего коэффициент усиления, пропорциональный величине С которого соединен с выходом датчика 4 тока, инверсньй вход сумматора 25 соединен с выходом усилителя 27, имеющего коэффициент усиления, пропорциональный величине I, вход которого связан с выходом датчика 3 уско рения . Вход усилителя 21 связан с выходом датчика 2 частоты вращения. Выход блока 18 деления соединен с инверсным входом сумматора 28 и входом квадратора 19, а также с входом усилителя 30, имеющего коэффициент усиления, пропорциональный 2L/R. Выходи квадратора 29 и усилителя 30 соединены с входами сумматора 31, вькод которого подключен к входу блока 32 извлечения корня. Выход блока 32 извлечения корня соединен с прямым входом сумматора 28. На вы ходе сумматора 28 формируется сигнал напряжения, пропорциональньш величине коэффициента Т, . Выход сум матора 28 соединен с одним из выходов блока 10 умножения, к второму входу которого подключен выход сумматора 9, формирующего сигнал производной ошибки по частоте вращения л и Сигнал напряжения, пропорциональньй моменту нагрузки, формируется на выходе сумматора 25 с помощью усилителей 26 и 27, на входы которых подаются сигналы напряжения, пропорциональные току и ускорению вращения двигателя. Устройство работает следующим образом. При отсутствии сигнала задания на входе системы под действием-обратной связи по частоте вращения и производ ной по частоте вращения на выходе релейного элемента 12 формируются разнополярные прямоугольные импульсы со скважностью 2. При этом значения сигналов напряжения на выходе датчиков частоты вращения 2, ускореНИН 3 тока 4 и на выходе сумматора 5 близки к нулю. В результате на выходе сумматоров 16 и 19 устанавливаются уровни напряжения, равные выходным значениям источников 14 и 22 постоянного напряжения. Сигнал на выходе блока 23, пропорциональный моменту нагрузки, равен нулю, т.е. на выходе блока 18 деления устанавливается уровень напряжения, равный отношению сигналов с выхода усилителя 17 и сумматора 19. После прохождения сигнала с выхода блока 18 деления через квадратор 29 и усилитель 30 они складьша10ТСЯ в сумматоре 31 . Так как величина выходного сигнала напряжения усилителя 30 на несколько порядков меньше входного сигнала, то можно считать, что на прямой и инверсный входы сумматора 28 поданы очень близкие по величине сигналы напряжения. В результате на выходе сумматора 28 устанавливается уровень напряжения, близкий к нулю, величина которого пропорциональна значению коэффициента TC . Следовательно, при отсутствии сигнала задания на входе системы, на выходе блока 10 умножения сигнал напряжения имеет значение, близкое к нулю. С выхода релейного элемента 12 через импульсный усилитель 13 мощности последовательность разнополярных импульсов со скважностью 2 с частотой скользящего режима подается на двигатель 1, Двигатель 1, обладающий фильтрующими свойствами, отрабатывает среднее значение напряжения за период питающего напряжения, величина которого в данном случае равна нулю. В результате вал двигателя 1 неподвижен. При подаче с блока 6 задания сигала напряжения, пропорционального заданной частоте вращения tjj через сумматоры 5 и 11 на вход релейного элемента 12, на его выходе устанавивается максимальное напряжение соответствующего знака. Это напряжение усиливается импульсным усилителем 13 мощности и подается в обмотку двигателя 1. Ток в обмотке двигателя 1 начинает возрастать, соответственно начинает расти напряжение на выходе датчика 4 тока. Увеличивается частота вращения двигателя 1, соответственно возрастает значение напряжения на выходе датчиков частоты вращесигнала задания величина ошибки nq частоте вращения, пропорциональная сигналу на выходе сумматора 5, макси мальна и равна u)j . После появления этого сигнала на входе блока 15. на выходе усилителя 17 устанавливает ся максимальное значение выходного напряжения. При увеличении напряжени на выходе датчиков ускорения 3 и ток 4 возрастает величина сигнала на выходе усилителя 24, пропорционального моменту нагрузки. При повышении частоты вращения увеличивается значение сигнала на выходе, усилителя 21. В ре зультате увеличивается фовень напря жения на выходе сумматора 19. В момент подачи сигнала задания ошибка по частоте врап:5ения резко увеличивается от нуля до Oj 5 в то время как частота вращения двигателя 1 из-за наличия механической инерции двигате ля увеличивается постепенно. Вследствие этого напряжение на выходе блока 18 деления сначала резко возрастает, а с ростом частоты вращения и уменьшения ошибки по частоте вращения начинает уменьшаться. При постоянном моменте нагрузки напряжение на выходе усилителей 26 и 27 начинает возрастать так, что разность этих сигналов, получаемая на выходе сумматора 25, остается постоянной. Сигнал напряжения с выхода блока 18деления усиливается усилителем 30 и возводится в квадрат квадратором 29. Квадратный корень из суммы выходных: сигналов квадратора 29 и усилителя 30 в момент подачи сигнала задан1-1Я превьшает по величине сигнал с выхода блока 18 деления В результате сравнения сигналов с выхода блока 32 извлечения корня и блока 18 деления разность, по-, лучаемая на выходе сумматора 28, имеет максимальное значение в момент сигнала задания. При увеличении частоты вращения и уменьшении ошибки по частоте вращения уменьшается значение входной величины для блоков 29 и 30. В результате уменьшается влияние второго слагаемого, получаемого на выходе усилите ля 30, на численное значение напряжения на выходе блока 32 извлечения корня, выполняющего операцию извлечения квадратного корня из суммы двух слагаемых, олно из КОТОРЫХ (на меньше другого. Вследствие этого разность входных сигналов сумматора 28 после резкого увеличения, обусловленного подачей на вход системы сигнала задания, начинает уменьшаться, оставаясь все время положительной. Это изменяющееся напряжение, пропорциональное величине коэффициента Т поступает на вход блока 10 умножения. На второй вход блока ум-ножения поступает сигнал напряжения, пропорциональный величине проиэводной от ошибки по частоте вращения, который получается на выходе сумматора 9. На прямой вход сумматора 9 подается сигнал с дифференцирующего звена 7 и на инверсный - сигнал с датчика 3 ускорения. Часто, в системе стабилизации частоты вращения величина сигнала задания изменяется от нуля до не мгновенно, а по линейному закону. 8этом случае на выходе дифференцирующего звена 7 удерживается уровень напряжения, пропорциональный производной от линейно нарастающего сигнала. Как только величина сигнала задания достигнет значения U)j выходной уровень напряжения дифференцирующего звена станет равным нулю. Абсолютное значение выходного сигнала напряжения блока 10 умножения, величина которого пропорциональна произведению , начинает возрастать при увеличении частоты вращения, так как абсолютное значение напряжения на выходе сумматора 9растет быстрее, чем уменьшается напряжение на выходе блока 8 формирования коэффициента. Б результате сложения положительного напряжения с .выхода сумматора 5 и отрицательного напряжения с выхода блока 10 умножения на выходе сумматора 11 фор- . мируется текущее значение функциипереключения 8 4О+ТсДи) На этапе разгона двигателя (участок фазовой траектории.ЛВ на фиг.З) величина напряжения на входе релейного элемента 12 превьшает величину -с6 при положительном направлении задания вращения. Релейный элемент устанавливается в устойчивое положение, поскольку соответствует выходное значение б , которое усиливается импульсным усилителем 13 мощности до величины -HJ. Это управляющее
напряжение подается в обмотку двигателя 1. По мере приближения частоты вращения двигателя 1 к заданному значению Oj, уменьшается значение сигнала ошибки по частоте вращения 4CJ и еще больше уменьшается значение производной от ошибки по частоте вращения, умноженной на коэффициент Т(. . Как только значение функции переключения на входе релейного элемента 12 достигнет величины зе .релейный элемент переключится в другое устойчивое положение,которому соответствует управление -U. На фаз.овой плоскости этому моменту времени соответствует положение изображающей точки на пересечении фазовой траектории ЛЬ и линии переключения S в точке Б (фиг.З). После этого изображающая точка скользит по участкам фазовых траекторий, соответствуницих управлению +U и -U, между линиями переключения S и S7
При этом продолжает увеличиваться значение сигнала на выходе датчика 2 частоты вращения и уменьшается значение напряжения на выходе сумматора 5, следовательно продолжает уменьшаться значение коэффициента Tg соответствующее напряжение которого формируется на выходе сумматора 28. Следовательно увеличивается наклон линий переключения S и S, что ведет к сокращению времени переходного процесса.
В это же время начинает увеличиваться напряжение на выходе сумматора 9, оставаясь все время отрицательной полярности, которое пропорционально производной от ошибки по частоте вращения. Диапазон изменения значения напряжения на входе релейного элемента 12 уже незначительно превышает ширину петли гистерезиса 23Р. П1 этом релейный элемент переключается с частотой скользящего режима из одного устойчивого состояния в другое. После завершения переходного процесса скважность импульсов на выходе релейного элемента 12 соответствует поддержанию заданной частоты вращения. При этом значение напряжения на выходе сумматора 28 близкое к нулю.
При резком увеличении момента нагрузки в установившемся режимеуменьшается частота вращения и соответственно увеличивается ошибка
по частоте вращения и уменьшается величина углового ускорения-. Возрастает значение сигнала на входе релейного элемента 12. Он устанавливается в устойчивое положение, которому соответствует управляющее напряжение +U. В результате начинает возрастать потребляемь1й ток двигателя 1. Увеличивается напряжение, пропорциональное моменту нагрузки, на выходе усилителя 24. Увеличивается значение напряжения на выходе блока 18 деления и, соответственно, увеличивается выходное напряжение сумматора 28. Увеличивается положительное напряжение на выходе блока умножения. При этом с выхода импульсного усилителя мощности в обмотку двигателя подается положительнре напряжение +U. На фазовой штоскости этому соответствует движение изображающей точки по фазовой траектории А В (фиг.З). При этом движении растет частота вращения, уменьшается ошибка по частоте, значение момента нагрузки остается постоянным и соответственно начинает уменьшаться величина коэффициента Т,, на выходе сумматора 26. Уменьшается входное значение сигнала релейного элемента 12 до значения -че . Релейный элемент 12 устанавливается в другое устойчивое положение и начинает пе реключаться с частотой скользящего режима. Изображающая точка движется по участкам фазовых траекторий, заключенных между линиями переключения S и S в направлении начала координат.
Таким образом, устройство дает . возможность сформировать функцию переключения, обеспечивающую повышение быстродействия системы при сохранении апериодического вида переходного процесса в широком диапазоне частот и при отработке резкопеременной нагрузки.
Формула изобретения
Устройство для стабилизации частоты вращения двигателя постоянного тока, содержащее блок задания частоты вращения, датчик частоты вращения, блок формирования коэффициента
Tj., основной сумматор, дифференцирующее звено, релейный элемент и импульсный усилитель мощности, выход блока задания частоты вращения подключен к входу дифференцирующего звена и прямому входу основного сумматора, к инверсному входу которогЬ подключен выход датчика частоты вращения, выход релейного элемента подключен к входу импульсного усилителя мощности, выход которого подключен к обмртке двигателя постоянного тока, отличающееся тем, что, с целью повышения быстродейстВИЯ при сохранении апериодического вида переходного процесса в широком диапазоне регулирования частоты вращения и при отработке резкопеременно нагрузки, в него введены датчик уско рения, датчик тока двигателя, два дополнительных сумматора, блок умножения с двумя входами, блок формирования коэффициента Те выполнен с четырьмя входами, причем выходы дифференцирующего звена и датчика ускорения подключены соответственно к прямому и инверсному входам первого дополнительного сумматора, выход которого подключен к первому входу блока умножения, выход основного сумматора подключен к первому входу второго дополнительного сумматора и к одному из входов блока формирования коэффициента Т, к остальным входам которого подключены выходы датчика тока, датчика ускорения и датчика частоты вращения, выход блока формирования коэффициента Т подн к второму входу блока умно, выход которого подключен к му входу второго дополнительномматора, выход которого соедивходом релейного элемента, а формирования коэффициента форт коэффициент Tg, равный R0(3e+Juu)|) 2()hR|Mj) т ы(ае- |ди}|) Сэг louj) (CjU + c MJ7Ri %iyJ ,|u)URIM,r Т - коэффициент при сигнале производной от ошибки по частоте вращения; R- активное сопротивление обмотки двигателя; - момент инерции, приведенный к валу двигателя, те- половина ширины петли гистерезиса релейного элементаi ДиО- ошибка по частоте вращения; Ct- коэффициент пропорциональности между вращакяцим моментом и током двигателя; Ь- индуктивность обмотки двигателя ; с)- частота вращения, М„- момент нагрузки,о vJ - амплитуда выходного напряжения импульсного усилителя мощности.


| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1365335A1 |
| Электропривод с оптимальным управлением | 1987 |
|
SU1534719A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Частотно-управляемый электропривод | 1987 |
|
SU1453576A1 |
| Электропривод постоянного тока | 1984 |
|
SU1226600A1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2458447C1 |
| СПОСОБ СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385530C1 |
| Вентильный электропривод | 1989 |
|
SU1640806A1 |

Изобретение относится к электротехнике. Повышение быстродействия обеспечивается за счет введения в устройство датчиков ускорения 3 и тока 4, двух сумматоров 9 и 11, блока умножения 10. В результате функция переключения для управления через релейный элемент 12 двигателя 1 формируется с учетом параметров двигателя 1, что повышает быстродействие устройства в переходных процессах. 3 ил.о (g (Л
CfJasZ
ЛШ
tffue.S
| Зажирко В.H.JФедоров В.Л | |||
| Расчет параметров периодического режима в релейной системе.- В кн.: Исследование эле ктрооборудованиягч железнодорожного транспорта | |||
| Омск: Омский институт инженеров железнодорожного транспорта, 1981, с.9-14 | |||
| Каспржак Г.М., Уткин В.И.,Гре- | |||
| хов В.П. | |||
| и др | |||
| Принципы построения к исследование маломощных приводов постоянного тока с релейным управлением в скользящем режиме.-Изв.ВУЗов СССР | |||
| Электромеханика, 1982, 12, с.1452-1458. |
