Изобретение относится к электротехнике, в частности к автоматизированной электроприводу с вентильным электродвигателем.
Целью изобретения является повышение качества стабилизации частоты вращения и ускорения.
На фиг„ 1 представлена блок-схема вентильного электропривода; на фиг.. 2 и 3 - статические характеристики нелинейных элементов; на фиг. 4 - принципиальная электрическая1 схема одного нелинейного элемента; на фиг„ 5 - принципиальная электрическая схема второго нелинейного элемента
Вентильный электропривод содержит синхронный электродвигатель 1 (фиг с 1), ротор которого выполнен с постоянными магнитами, а якорная обмотка подключена к выходу транзисторного .инвертора 2, силовой вход которого подключен к выходу выпрямителя 3, подключенного входом к сети переменного токас Многоканальный управляющий вход инвертора 2 подключен к многоканальному выходу распределителя 4 импульсов, три входа которого подключены к выходам датчика 5 положения ротора, установленного на валу синхронного двигателя 1, а четвертый вход распределителя 4 импульсов соединен с выходом релейного элемента 6„
На валу синхронного электродвигателя 1 установлен датчик 7 частоты вращения, выход которого подключен к второму входу первого узла 8 сравнения, первым входом соединенного с выходом задатчика частоты вращения (не показан). Электропривод содержит также блок 9 датчиков тока, включенных в выходные цепи инвертора 2.
Вход релейного элемента 6 подключен к выходу второго узла 10 сравнения, снабженного первым, вычитающим, и вторым и третьим, суммирующими, входами. Электропривод снабжен первым 11 и вторым 12 нелинейными элементами, блоками дифференцирования 13 и умножения 14.
Выход первого узла 8 сравнения подключен к третьему входу второго узла 10 сравнения и входам второго нелинейного элемента 12 и блока 13 дифференцирования. Выходы нелинейного элемента 12 и блока 13 дифферен
0
5
0
5
0
5
0
5
цирования соединены с входами блока 14 умножения соответственно, выход которого подключен к первому входу узла 10 сравнения, второй вход которого соединен с выходом первого нелинейного элемента 11, входом связанного с выходом блока 9 датчиков тока.
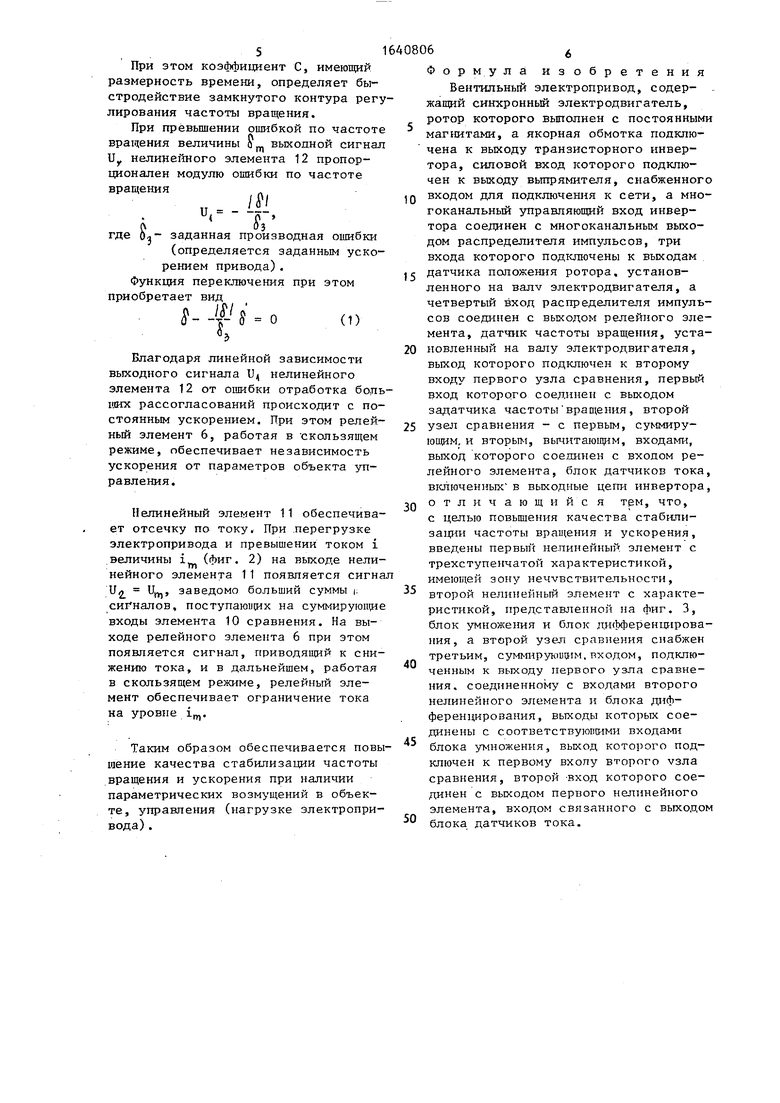
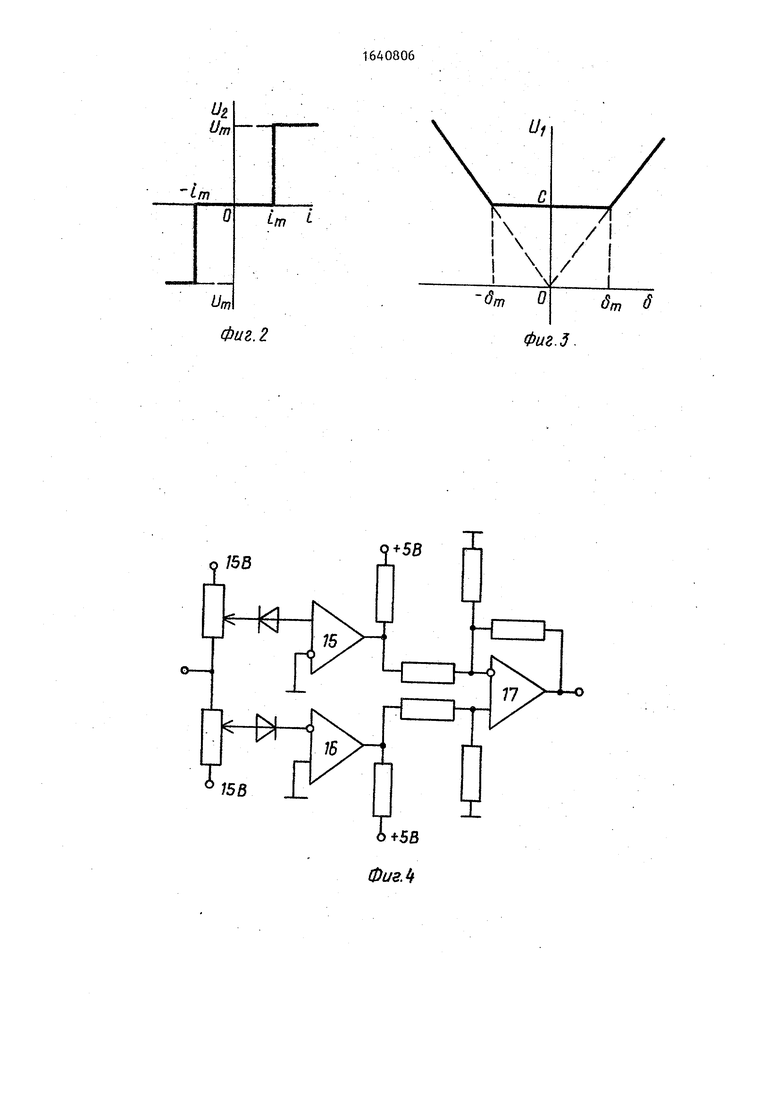
Первый нелинейный элемент 11, реализующий трехступенчатую статическую характеристику с зоной нечувствительности (фиг. 2), содержит два компаратора 15 и 16 и операционный усилитель 17. Порог срабатывания компараторов 15 и 16 задается напряжениями, снимаемыми с потенциометров, установленных на входах компараторов. Сигнал на выходе операционного усилителя 17 пропорционален разности выходных сигналов компараторов 15 и 16. Компараторы 15 и 16 могут быть реализованы, например, на микросхемах.
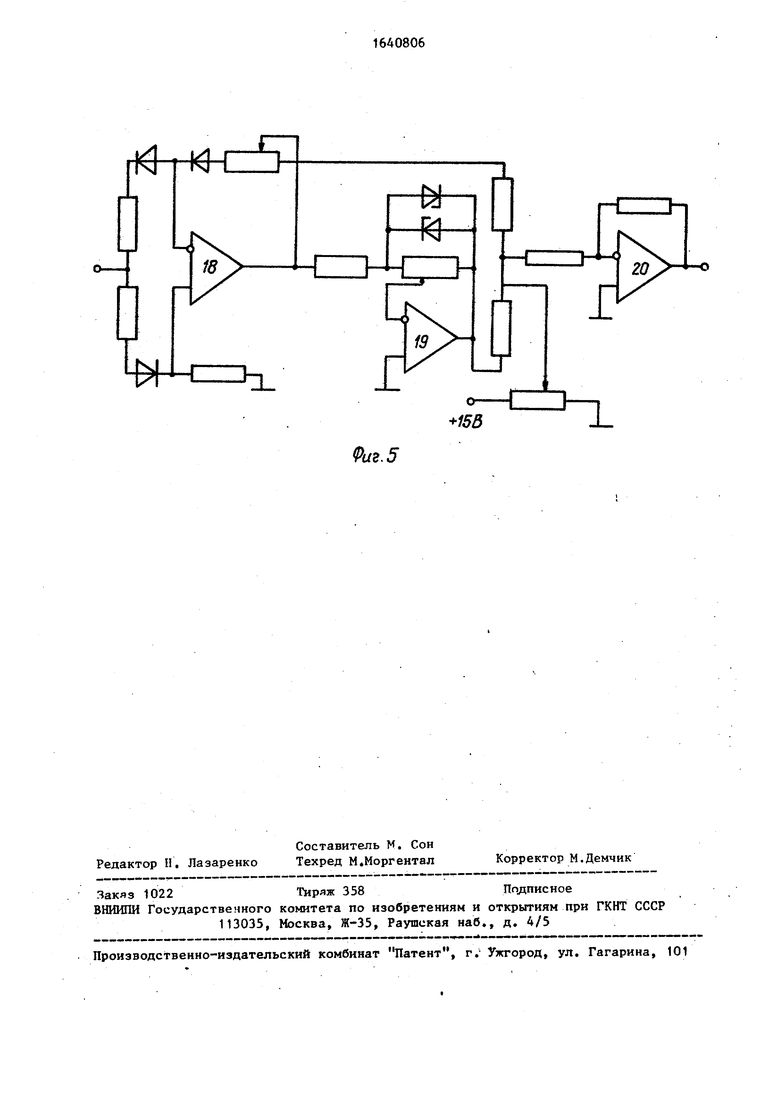
Второй нелинейный элемент 12, реализующий представленную на фиг. 3 статическую характеристику, содержит три операционных усилителя 18-20 (фиг. 5)о Операционный усилитель 18 реализует схему выделения модуля входного сигнала. Коэффициент усиления усилителя 18 задается переменным сопротивлением в цепи обратной связи. Операционный усилитель .19 с помощью встречно-параллельно включенных стабилитронов реализует схему ограничения. Операционный усилитель 20 является сумматором выходных сигналов операционных усилителей 18 и 19 и напряжения смещения, снимаемого с делителя.
i
Вентильный электропривод работает
следующим образом.
При малых ошибках регулирования частоты вращения по абсолютной величине, меньших заданной максимальной ошибки оm (фиг. 3), выходной сигнал U. второго нелинейного элемента 12 не зависит от входного сигнала, пропорционального текущей ошибке о регулирования частоты вращения и равен С. При этом функция переключения релейного элемента 6 имеет вид
Ј+с,
где о - производная ошибки, и релейный элемент 6, работая в скользящем режиме, осуществляет стабилизацию частоты вращения.
При этом коэффициент С, имеющий размерность времени, определяет быстродействие замкнутого контура регулирования частоты вращения.
При превышении ошибкой по частоте вращения величины йт выходной сигнал U у нелинейного элемента 12 пропор16
ционален модулю ошибки по частоте вращения
. v-f.
лиз
где заданная производная ошибки
(определяется заданным ускорением привода). Функция переключения при этом приобретает вид
Ј--f& 0 (1) 5
Благодаря линейной зависимости выходного сигнала U нелинейного элемента 12 от ошибки отработка больших рассогласований происходит с постоянным ускорением. При этом релейный элемент 6, работая в скользящем режиме, обеспечивает независимость ускорения от параметров объекта управления.
Нелинейный элемент 11 обеспечивает отсечку по току. При перегрузке электропривода и превышении током i величины i (фиг. 2) на выходе нелинейного элемента 11 появляется сигнал
и,
U, заведомо больший суммы
сигналов, поступающих на суммирующие входы элемента 10 сравнения. На выходе релейного элемента 6 при этом появляется сигнал, приводящий к снижению тока, и в дальнейшем, работая в скользящем режиме, релейный элемент обеспечивает ограничение тока на уровне „,.
Таким образом обеспечивается повышение качества стабилизации частоты вращения и ускорения при наличии параметрических возмущений в объекте, управления (нагрузке электропривода) .
08066
Формула изобретения
Вентильный электропривод, содержащий синхронный электродвигатель, ротор которого выполнен с постоянными магнитами, а якорная обмотка подключена к выходу транзисторного инвертора, силовой вход которого подключен к выходу выпрямителя, снабженного
0
5
0
5
0
5
0
5
0
входом для подключения к сети, а многоканальный управляющий вход инвертора соединен с многоканальным выходом распределителя импульсов, три входа которого подключены к выходам датчика положения ротора, установленного на вaлv электродвигателя, а четвертый вход распределителя импульсов соединен с выходом релейного элемента, датчик частоты вращения, установленный на валу электродвигателя, выход которого подключен к второму входу первого узла сравнения, первый вход которого соединен с выходом задатчика частоты вращения, второй узел сравнения - с первым, суммирующим, и вторым, вычитающим, входами, выход которого соединен с входом релейного элемента, блок датчиков тока, включенных в выходные цепи инвертора, отличают, и йс я тем, что, с целью повышения качества стабилизации частоты вращения и ускорения, введены первый нелинейный элемент с трехступенчатой характеристикой, имеющей зону нeчvвcтвитeльнpcти, второй нелинейный элемент с характеристикой, представленной на фиг. 3, блок умножения и блок дифференцирования, а второй узел сравнения снабжен третьим, суммирующим.входом, подключенным к выходу первого узла сравнения, соединенному с входами второго нелинейного элемента и блока дифференцирования, выходы которых соединены с соответствующими входами блока умножения, выход которого подключен к первому вхопу второго узла сравнения, второй вход которого соединен с выходом первого нелинейного элемента, входом связанного с выходом блока датчиков тока.
+/53
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Устройство для управления транспортным средством | 1989 |
|
SU1740211A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ АДАПТИВНЫЙ РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2015 |
|
RU2622183C2 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1334347A1 |
| Устройство для моделирования электрических машин | 1988 |
|
SU1597886A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Устройство для управления электроприводом постоянного тока | 1981 |
|
SU1001405A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
Изобретение относится к электротехнике Цель изобретения - улучшение качества стабилизации частоты вращения и ускорения„ Вентильный электропривод содержит два узла 7 и 8 сравнения, два нелинейных элемента 11 и 12, блок 14 умножения, релейный элемент 10, блок 13 дифференцирования, которые осуществляют в зависимости от режима, работы регулирование частоты вращения, ускорения и тока. 5 ил. (Л С оэ Јъ 00 О ф 
Фиг. 5
| Кагар В.Г0 и др | |||
| Транзисторные приводы с бесконтактными синхронными двигателями для станков с ЧПУ | |||
| - Электротехническая промышленность-, серо Электропривод, 1984, выл, 1 |
