Изобретение относится к электротехнике, а именно к частотно-регулируемым электроприводам, и может быть использовано для регулирования скорости вращения нагрузки в системах и механизмах общепромышленного применения, в которых определяющими являются требования экономичности.
Целью изобретения является уменьгаение потребляемой электроэнергии в частотно-регулируемом электроприводе .за счет повышения точности стабилизации минимума потребляемого тока.
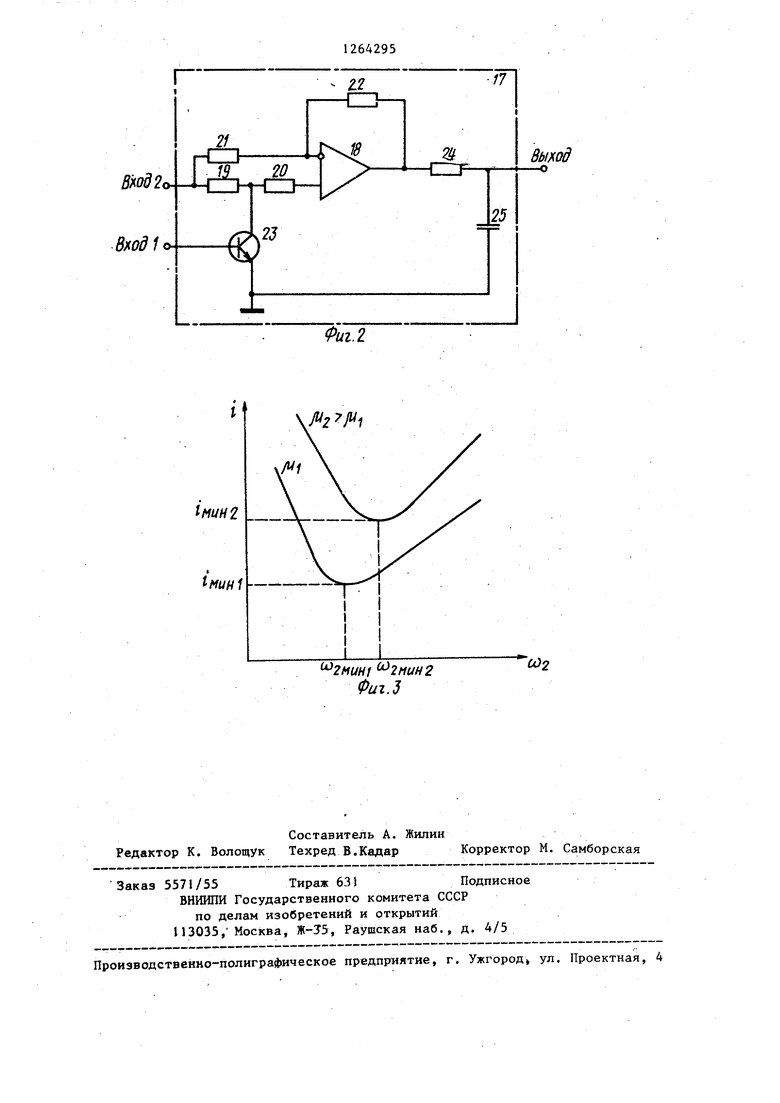
На фиг. 1 представлена функциональная схема частотно-регулируемого электропривода; на фиг. 2 - схема синхронного детектора; на фиг. 3 вид зависимости тока электродвигателя от частоты скольжения.
Частотно-регулируемый электропривод содержит асинхронный электродвигатель 1 (фиг.. 1), подключенньй к выходу преобразователя 2 частоты. Датчик 3 скорости, установленный на валу асинхронного электродвигателя 1, первый и второй элементы 4 и 5 дифференцирования, первый и второй компараторы 6 и 7, логический элемен РАВНОЗНАЧНОСТЬ 8, интегратор 9, датчик 10 тока на силовом входе преобразователя 2 частоты и последовательно соединенные блок 11 задания скорости, элемент 12 сравнения, регулятор 13 скорости, первый и второй сумматоры 14 и 15 и регулятор 16 тока. Другой вход регулятора 16 тока подключен к выходу регулятора J3 скорости. Выход датчика 3 скорости подключен к объединенным между собой другим входам элемента 12 сравнения и второго сумматора 15. Выход первог сумматора 14 через первый элемент 4 дифференцирования и первый компарато 6 подключен к первому входу логического элемента РАВНОЗНАЧНОСТЬ 8, второй вход которого соединен с выходом второго компаратора 7. Другой вход первого сумматора 14 подключен к выходу интегратора 9, а выход датчика 10 тока соединен с входом второго элемента 5 дифференцирования.
Б частотно-регулируемый электропривод введен синхронный детектор 17 с двумя входами, первый из которых подключен к выходу логического -элемента РАВНОЗНАЧНОСТЬ 8, второй - к выходу второго элемента 5.дифференцирования, а выход синхронного детек тора 17 подключен к входу интегратора 9, при этом вход второго компаратора 7 подключен к выходу регулятора
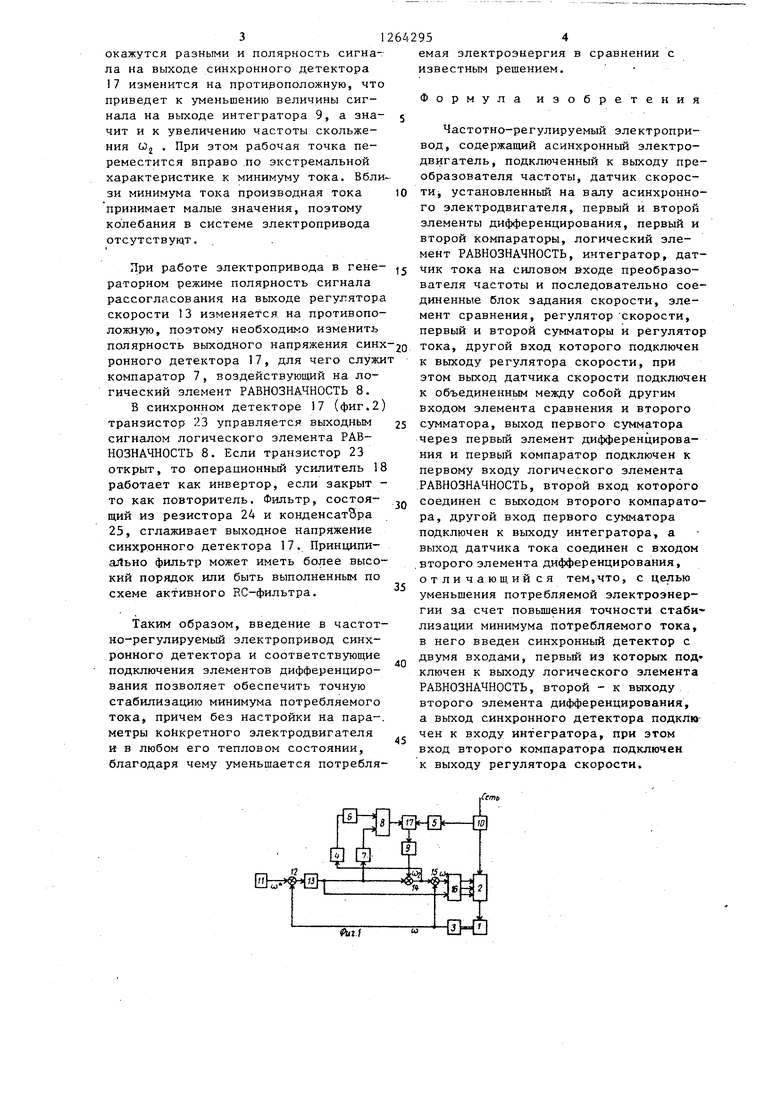
13 скорости. Синхронный детектор 17 может быть выполнен на операционном усилителе 18 (фиг. 2) с резисторами 19-21 во входных цепях и резистором 22 в цепи обратной связи. К общей
точке резисторов 19 и 20 подключен коллектор транзистора 23. К выходу операционного усилителя 18 подключен фильтр, состоящий из резистора 24 и конденсатора 25.
Частотно-регулируемый электропривод работает следующим образом.
С помощью элементов 4 и 5 дифференцирования вь числяют производные во времени соответственно сигнала
частоты скольжения и тока. Компаратор 6 определяет знак производной частоты скольжения и через логический элемент РАВНОЗНАЧНОСТЬ 8 управляет синхронным детектором 17, на второй
(аналоговый) вход которого поступает сигнал производной тока.
Сигнал, соответствующий полярности сигнала с выхода синхронного детектора 17, поступает на вход интегратора 9, где интегрируется и подается На сумматор 14. На указанный сумматор 14 поступает также сигнал рассогласования с выхода регулятора 13 скорости, входной сигнал которого
формируется по результатам сравнения заданной и измеренной скорости вращения. На выходе сумматора 14 сигнал соответствует заданной частоте скольжения о электродвигателя. С помопи.ю
сумматора J5 определяется сигнал ы., соответствующий сумме частоты скольжения CJ и измеренной частоты вращечия со ротора, т.е. W, 0+0)2.
При совпадении знаков производных на выходах элементов 4 и 5 дифференцирования, что соответствует работе электропривода справа от минимума тока (фиг. З), сигнал коррекции на
выходе интегратора 9 имеет полярность, обратную полярности сигнала рассогласования с выхода регулятора 13 скорости,, и частоту скольжения уменьшается. При этом ток также
уменьшается. Если рабочая точка перейдет по экстремальной характеристике минимум тока, т.е. окажется слева г минимума, то знаки производных окажутся разными и полярность сигнала на выходе синхронного детектора 17 изменится на протиэоположную, что приведет к уменьшению величины сигнала на выходе интегратора 9, а значит и к увеличению частоты скольжения Uj . При этом рабочая точка переместится вправо по экстремальной характеристике к минимуму тока. Вбли зи минимума тока производная тока принимает малые значения, поэтому колебания в системе электропривода отсутствует. При работе электропривода в гене раторном режиме полярность сигнала рассогласования на выходе регулятор скорости 13 изменяется на противопо ложную, поэтому необходимо изменить полярность выходного напряжения син ронного детектора 17, для чего служ компаратор 7, воздействующий на логический элемент РАВНОЗНАЧНОСТЬ 8. В синхронном детекторе 17 (фиг.2 транзистор 23 управляется выходным сигналом логического элемента РАВНОЗНАЧНОСТЬ 8. Если транзистор 23 открыт, то операционный усилитель 1 работает как инвертор, если закрыт то как повторитель. Фильтр, состоящий из резистора 24 и конденсатора 25, сглаживает выходное напряжение синхронного детектора 17. Принципиально фильтр может иметь более высо кий порядок или быть выполненньм по схеме активного RC-фильтра. Таким образом, введение в частот но-регулируемый электропривод синхронного детектора и соответствующие подключения элементов дифференцирования позволяет обеспечить точную стабилизацию минимума потребляемого тока, причем без настройки на параметры конкретного электродвигателя и в любом его тепловом состоянии, благодаря чему уменьшается потребля емая электроэнергия в сравнении с известным решением. Формула изобретения Частотно-регулируемый электропривод, содержащий асинхронный электродвигатель, подключенный к выходу преобразователя частоты, датчик скорости установленный на валу асинхронного электродвигателя, первый и второй элементы дифференцирования, первый и второй компараторы, логический элемент РАВНОЗНАЧНОСТЬ, интегратор, датчик тока на силовом входе преобразователя частоты и последовательно соединенные блок задания скорости, элемент сравнения, регулятор скорости, первый и второй сумматоры и регулятор тока, другой вход которого подключен к выходу регулятора скорости, при этом выход датчика скорости подключен к объединенным между собой другим входом элемента сравнения и второго сумматора, выход первого сумматора через первый элемент дифференцирования и первый компаратор подключен к первому входу логического элемента .РАВНОЗНАЧНОСТЬ, второй вход которого соединен с выходом второго компаратора, другой вход первого сумматора подключен к выходу интегратора, а выход датчика тока соединен с входом второго элемента дифференцирования, отличающийся тем,что, с целью уменьшения потребляемой электроэнергии за счет повышения точности стабилизации минимума потребляемого тока, в него введен синхронный детектор с двумя входами, первый из которых под ключен к выходу логического элемента РАВНОЗНАЧНОСТЬ, второй - к выходу второго элемента дифференцирования, а выход синхронного детектора подклю чен к входу интегратора, при этом вход второго компаратора подключен к выходу регулятора скорости.
гп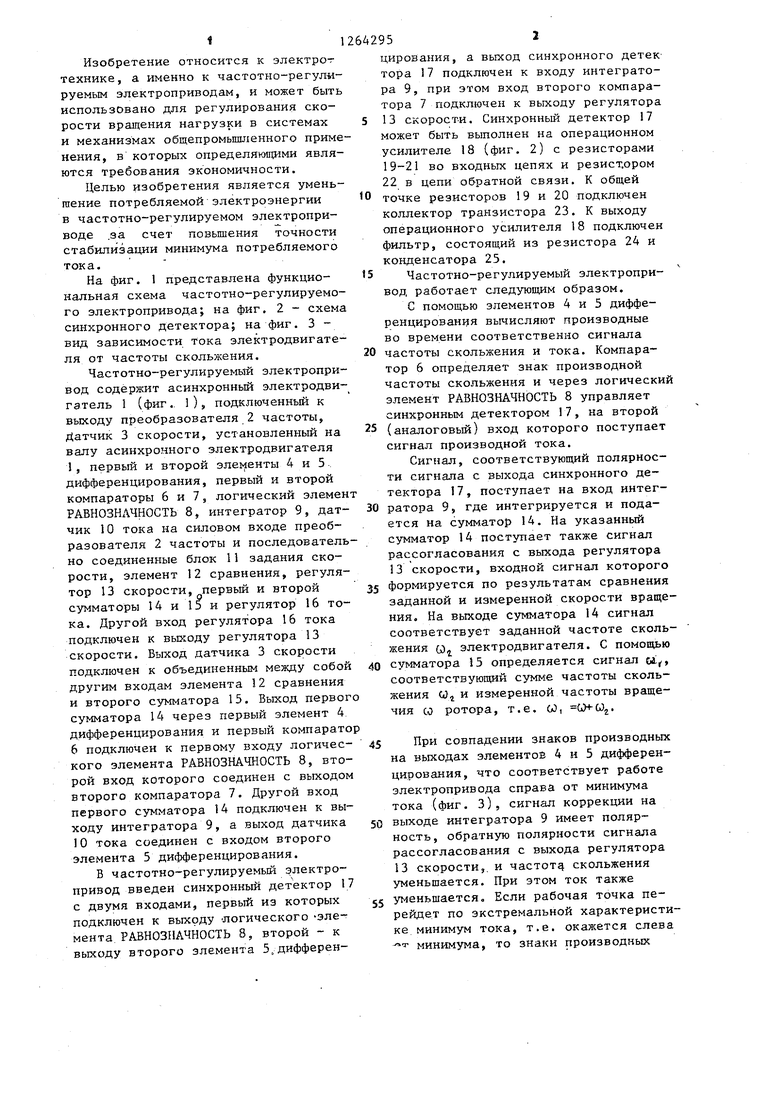
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| Устройство оптимизации электропривода стенда для испытаний трансмиссий | 1988 |
|
SU1596305A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| Частотно-управляемый асинхронный электропривод | 1985 |
|
SU1257798A1 |
| Частотно-регулируемый электропривод | 1983 |
|
SU1125724A1 |
| Устройство для светового сопровождения музыки | 1985 |
|
SU1245333A1 |
| Устройство для реверса асинхронного частотно-регулируемого электродвигателя | 1983 |
|
SU1418881A1 |
| ИНТЕГРИРУЮЩЕЕ УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2009 |
|
RU2422974C1 |
Изобретение относится к электротехнике и может быть использовано в системах и механизмах общепромьшленного назначения. Целью изобретения является уменьшение потребляемой электроэнергии, Частотно-регулируемый электропривод содержит асинхронный двигатель (АД) 1, подключенный через преобразователь 2 частоты к сети. На силовом входе преобразователя 2 установлен датчик 10 тока. Вал АД 1 механически связан с датчиком 3 скорости. Управляющие входы преобразова теля 2 соединены с выходом регулятора 16 тока.Один вход регулятора 16 через сумматоры (С) 14, 15 связан с выходом регулятора 13 скорости, а другой вход регулятора 16 - с указанным выходом непосредственно. Вход регулятора 13 через узел 12 сравнения соединен с блоком 11 задания скорости. Выход датчика 3 соединен со вторыми входами узла 12 и С 15. Выход С 14 через элемент 4 дифференцирования, компаратор 6 связан с первь1м входом логического элемента РАВНОЗНАЧНОСТЬ 8, второй вход которого с S через компаратор 7 подключен к выхо(Л ду регулятора 13. Второй вход С 14 через интегратор 9 связан с выходом с: синхронного детектора (СД). 17. Первый вход СД 17 подключен к выходу логического элемента РАВНОЗНАЧНОСТЬ В, а второй вход СД 17 через эле- . мент 5 дифференцирования - к выходу датчика 10. В электроприводе обеспечивается точная стабилизация минимуN5 ма потребляемого тока без настройки а на параметры конкретного электродви4 .гателя и в любом тепловом состоянии. ГС 3 ил. со ел
Вы}(од
-CZF-о
25
Фиг.г
Л
1мин2
мин1
2МиН1 2 мин 2
0)2
Фиг.:5
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ВЫРАБОТКИ КОНСЕРВОВ "КОТЛЕТЫ ОБЖАРЕННЫЕ В ЧИЛИЙСКОМ СОУСЕ" | 2011 |
|
RU2460364C1 |
| Н, 02 Р 5/34, 1974. | |||
