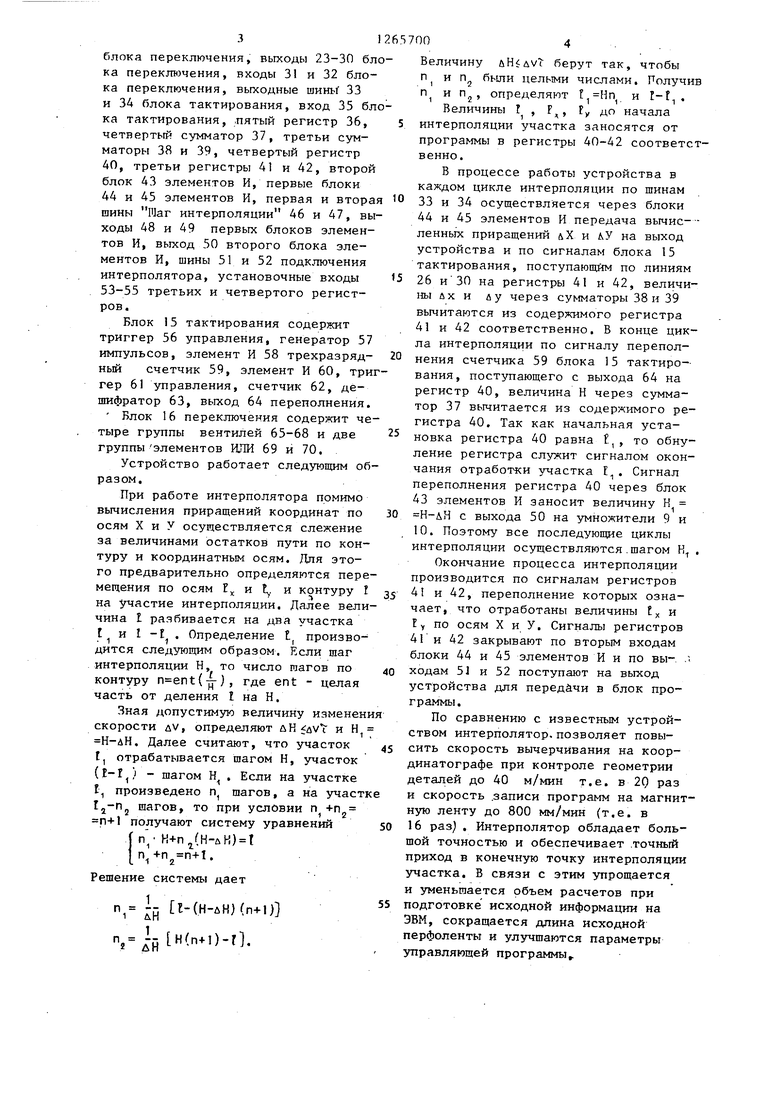
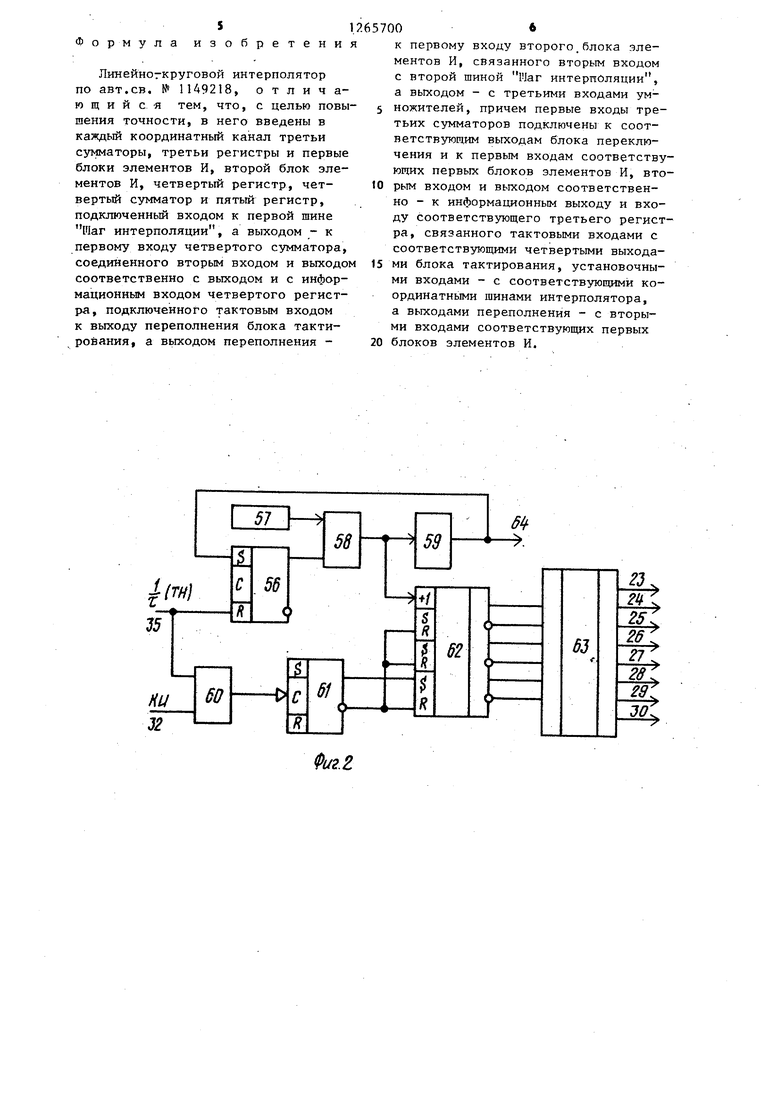
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах числового программного управления станками. Наиболее близким техническим ре шением к предлагаемому является линейно-круговой интерполятор, содержащий в каждом координатном канале первый регистр, выход которого соединен с первым входом делителя, под ключенного первым выходом к первому входу группы вентилей, блок, тактирования, блок переключения и в каждом координатном канале последовательно соединенные первый сумма тор, второй регистр, умножитель и второй Сумматор, выход которого сое динен с первым входом первого регистра, а второй вход - с выходом группы вентилей, второй вход которого соединен с вторым входом первого регистра и с вторым выходом блока тактирования, первый выход которого подключен к второму входу умножителя, третий выход - к второму входу делителя, а четвертый выход - к первому входу второго регистра другого канала и к первому вхо ду блока переключения, соединенного выходом с первым входом первого сум матора, второй вход которого подключен к выходу второго регистра, второй вход блока переключения соединен с вторым выходом делителя, третий вход которого подключен к вх ду устройства, в котором блок такти рования содержит генератор импульсо выходом соединенный с первым входом первого элемента И, второй вход которого через первый триггер соедине с выходом первого счетчика, а также последовательно соединенные второй элемент И, второй триггер, второй счетчик и дешифратор, выходы которы соединены с выходами блока тактирования, выход первого элемента И сое динен с входом первого счетчика и с входом второго счетчика, входы втор го элемента И и R-вход первого триг гера подключены к входам блока тактирования П . Однако интерполятор имеет низкую точность выхода в конечную точку участка интерполяции. Если шаг интерполяции по контуру Нзу (v скорость подачи, интервал вычис ления приращений , а величина пер 0J мещения по контуру I, то общее число шагов интерполяции . Поскольку п- целое число, то при некратности величин F и Н возникает ошибка выхода в конечную точку участка интерполяции, максимальная величина которой достигает значения +(). Цель изобретения - повышение точности интерполятора. Поставленная цель достигается тем, что в линейно-круговой интерполятор введены в каждый координатный канал третьи сумматоры, третьи регистры и первые блоки элементов И, второй блок элементов И, четвертый регистр, четвертый сумматор и пятый регистр, подключенный входом к первой шине Шаг интерполяции, а выходом - к первому входу четвертого сумматора, соединенного вторым входом и выходом соответственно с выходом и с информационным входом четвертого регистра, подключенного тактовым входом к выходу переполнения блока тактирования, а выходом переполнения - к первому входу второго блока элементов И, связанного вторым входом с второй щиной Шаг интерполяции, а выходом - третьими входами умножителей, причем первые входы третьих сумматоров подключены к соответствующим выходам блока переключения и к первым входам соответствующих первых блоков элементов И, вторым входом и выходом соответственно к информационному выходу и информационному входу соответствующего третьего регистра, связанного тактовыми входами с соответствующими четвертыми выходами блока тактирования, установочными входами с соответствующими координатными тинами устройства, а выходами переполнения - с вторыми входами соответствующих первых блоков элементов И, На фиг, I представлена функциональная схема интерполятора; на фиг, 2 - функциональная схема блока тактирования; на фиг, 3 - функциональная схема блока переключения. Интерполятор содержит первые 1, 2 и вторые 3, 4 регистры, первые 5, 6 и вторые 7 8 сумматоры, умножители 9 и 10, делители 11 и 12, вентили 13 и 14, блок 15 тактирования, блок 16 переключения, первые выходы 17 и 18 делителей, вторые 19 и 20 выходы делителей, выходы 21 и 22 3 блока переключения, выходы 23-30 бл ка переклизчения, входы 31 и 32 блока переключения, выходные шины 33 и ЗА блока тактирования, вход 35 бл ка тактирования, .пятый регистр 36, четвертый сумматор 37, третьи сумматоры 38 и 39, четвертый регистр АО, третьи регистры 41 и 42, второй блок 43 элементов И, первые блоки 44 и 45 элементов И, первая и втор шины Шаг интерполяции 46 и 47, вы ходы 48 и 49 первых блоков элементов И, выход 50 второго блока элементов И, шины 31 и 52 подключения интерполятора, установочные входы 53-55 третьих и четвертого регистров. Блок 15 тактирования содержит триггер 56 управления, генератор 5 импульсов, элемент И 58 трехразрядный счетчик 59, элемент И 60, три гер 61 управления, счетчик 62, дешифратор 63, выход 64 переполнения Блок 16 переключения содержит че тыре группы вентилей 65-68 и две группыэлементов ИЛИ 69 и 70, Устройство работает следующим об разом. При работе интерполятора помимо вычисления приращений координат по осям X и У осуществляется слежение за величинами остатков пути по контуру и координатным осям. Для этого предварительно определяются пере мещения по осям ЕХ и у и контуру на участие интерполяции. Далее вели чина I разбивается на два участка I и 1 -I . Определение t, производится следующим образом. Если щаг интерполяции Н, то число шагов по контуру (), где ent - целая часть от деления I на Н. Зная допустимую величину изменен скорости AV, определяют лН дУТ и Н, Н-дН. Далее считают, что участок I, отрабатывается шагом Н, участок (1-) - шагом Н . Если на участке 1, произведено п шагов, а на участ Ij-Hj щагов, то при условии п+1 получают систему уравнений H+n,(H-uH) t . Решение системы дает п 1- 1-(Н-лН)(п-И)} п, |р Н(п+1)-Г. 00 берут так, чтобы Величину Полз п и п, были целыми числами. Получив п и п,, определяют „ . и I-f, Величины I , Р.. EV до начала , -у интерполяции участка заносятся от программы в регистры 40-42 соответственно, В процессе работы устройства в каждом цикле интерполяции по шинам 33 и 34 осуществляется через блоки 44 и 45 элементов И передача вычис-ленных приращений &Х и лУ на выход устройства и по сигналам блока 15 тактирования, поступающим по линиям 26 и30 на регистры 41 и 42, величины дх и ду через сумматоры 38 и 39 вычитаются из содержимого регистра 41 и 42 соответственно. В конце цикла интерполяции по сигналу переполнения счетчика 59 блока 15 тактирования, поступающего с выхода 64 на регистр 40, величина Н через сумматор 37 вычитается из содержимого регистра 40. Так как начальная установка регистра 40 равна ,, то обнуление регистра сяукит сигналом окончания отработки участка Е. Сигнал переполнения регистра 40 через блок 43 элементов И заносит величину Н Н-дН с выхода 50 на умножители 9 и 10. Поэтому все последующие циклы интерполяции осуществляются.шагом К . Окончание процесса интерполяции производится по сигналам регистров 41 и 42, переполнение которых означает, что отработаны величины t и Г у по осям X и У. Сигналы регистров 4Г и 42 закрывают по вторым входам блоки 44 и 45 элементов И и по вы- . ходам 51 и 52 поступают на выход устройства для передачи в блок программы. По сравнению с известным устройством интерполятор, позволяет повысить скорость вычерчивания на координатографе при контроле геометрии деталей до 40 м/мин т.е. в 20 раз и скорость .записи программ на магнитную ленту до 800 мм/мин (т.е. в 16 раз) . Интерполятор обладает большой точностью и обеспечивает .точный приход в конечную точку интерполяции участка. В связи с этим упрощается и уменьшается объем расчетов при подготовке исходной информации на ЭВМ, сокращается длина исходной перфоленты и улучшаются параметры управляющей программы.
Ф о р м ула изобретения
Линейногкруговой интерполятор по авт.св. № 1149218, отличающийся тем, что, с целью повышения точности, в него введены в каждый координатный канал третьи сумматоры, третьи регистры и первые блоки элементов И, второй блок элементов И, четвертый регистр, четвертый сумматор и пятый регистр, подключенньш входом к первой шине Шаг интерполяции, а выходом - к первому входу четвертого сумматора, соединенного вторым входом и выходом соответственно с выходом и с информационным входом четвертого регистра, подключенного тактовым входом к выходу переполнения блока тактирования, а вьпсодом переполнения к первому входу второго.блока элементов И, связанного вторым входом с второй шиной Шаг интерполяции, а выходом - с третьими входами умножителей, причем первые входы третьих сумматоров подключены к соответствующим выходам блока переключения и к первым входам соответствующих первых блоков элементов И, вторым входом и выходом соответственно - к информационным выходу и входу соответствующего третьего регистра, связанного тактовыми входами с соответствующими четвертыми выходами блока тактирования, установочными входами - с соответствующими координатными шинами интерполятора, а выходами переполнения - с вторыми входами соответствующих первых
блоков элементов И.
21 -
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейно-круговой интерполятор | 1984 |
|
SU1215090A2 |
| Линейно-круговой интерполятор | 1982 |
|
SU1149218A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1302241A2 |
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Устройство для управления многокоординатным оборудованием | 1987 |
|
SU1427334A1 |
| Цифровой интерполятор | 1986 |
|
SU1310778A1 |
| Линейный интерполятор для систем интерактивной графики | 1988 |
|
SU1608691A1 |
Изобретение относится к области автоматики и вычислительной техники и может быть использовано в системах числового программного управления станками. Целью изобретения является повьппение точности интерполятора. Интерполятор содержит первые 1, 2 и вторые 3, 4 регистры, первые 5,6 и вторые 7, 8 сумматоры, умножители 9 и 10, делители 1 1. и 12, вентили 13 и 14, блок тактирования 15, блок переключения 16, пятый регистр 36, четвертый сумматор 37, -третьи сумматоры 38, 39, четвертый регистр 40, третьи регистры 41, 42, второй блок 43 элементов И, первые блоки 44, 45 элементов И. Интерполятор обладает большой точностью и обеспечивает точный приход в конеч§ ную точку интерполяции участка. (/) 3 ил. О СП чЗ Го
19 ЛГ
26 Т
30 8Т
20 лг
32 НЦ
JJ
лх
69
J /14/
70
22 -
| Линейно-круговой интерполятор | 1982 |
|
SU1149218A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
