f 1
Изобретение относится к автоматике и может быть использовано в системах числового программного управления .
Цель изобретения - упрощение интерполятора и повышение точности его работы. .
Наличие автономного блока интерполяции коррекции, состоящего из генератора, элемента И, RS-триггера, блока круговой интерполяции, умножителя, делителя и счетчика, использующего для вычисления величин смещения эквидистан- ты, а не приращения вектора коррекции, обеспечивает возможность вычисления величин смещения эквидистанты одновременно с интерполяцией контура скорректированной эквидистанты, что повьппает быстродействие устройства, увеличивает точность воспроизведения скорректированного контура (погрешность не более одной дvIC- . креты), так как интерполяция произ- . водится уже по смещенным данным.
На фиг.1 представлена схема цифрового интерполятора; на фиг.2 - схема блока линейно-круговой интерполяции; на фиг.З - пример схемы круговой интерполяции; на фиг.4 - пример выполнения счетчика на фиг.З - пример выполнения блока задания скорости; на фиг.6 - график,
иллюстрирзпощий работу интерполятора.
Интерполятор содержит блок 1 зй- дания скорости,первый счетчик 2 импульсов, блок 3 линейно-круговой интерполяции, генератор импульсов 4,элемент И 5, RS-триггер 6, блок 7 круговой интерполяции, счетчик 8 импульсов, умножитель 9 и делитель 10 импульсов. Блоки 3 и 7 интерполяции работают по методу оценочной функции. Вход 11 узла оценочной функции блока 3 связан с выходом блока 1 задания скорости, входы 12 и 13 счетчиков - регистров координат блока 3 связаны с выходами блока круговой интерполяции 7, вход 14 счетчика импульсов 8 соединен с входом счетчика 2 импульсов. Входы 15-22 устройства связаны с блоком программы
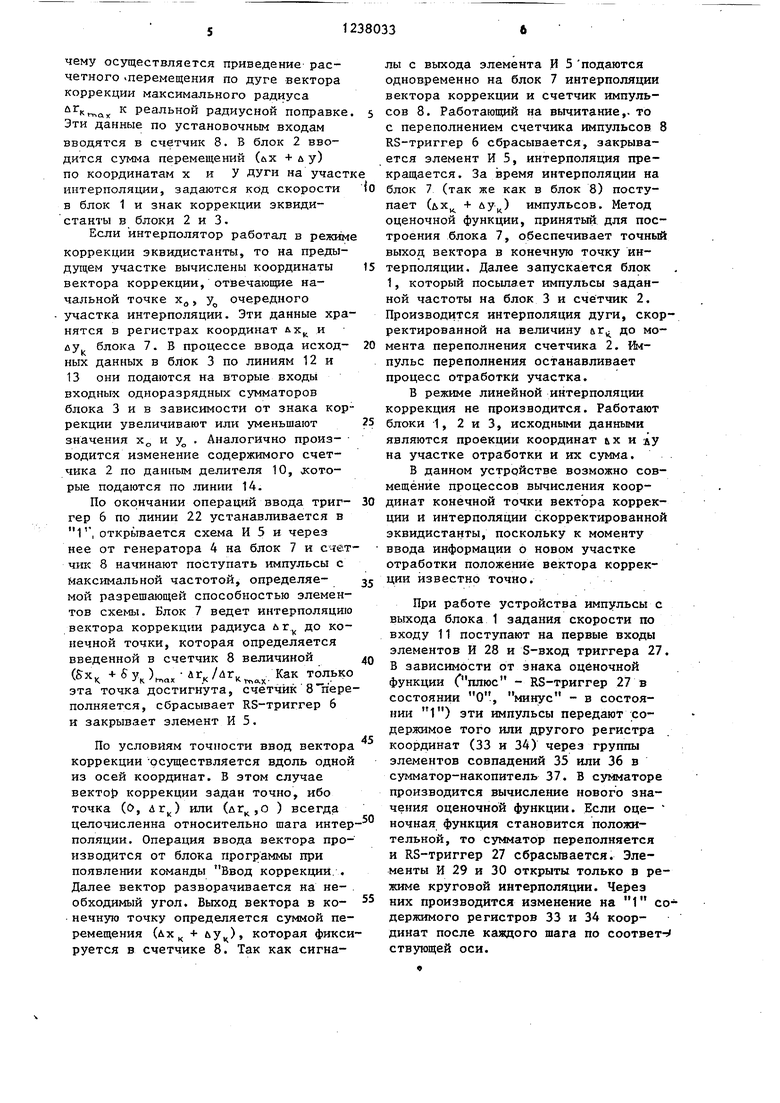
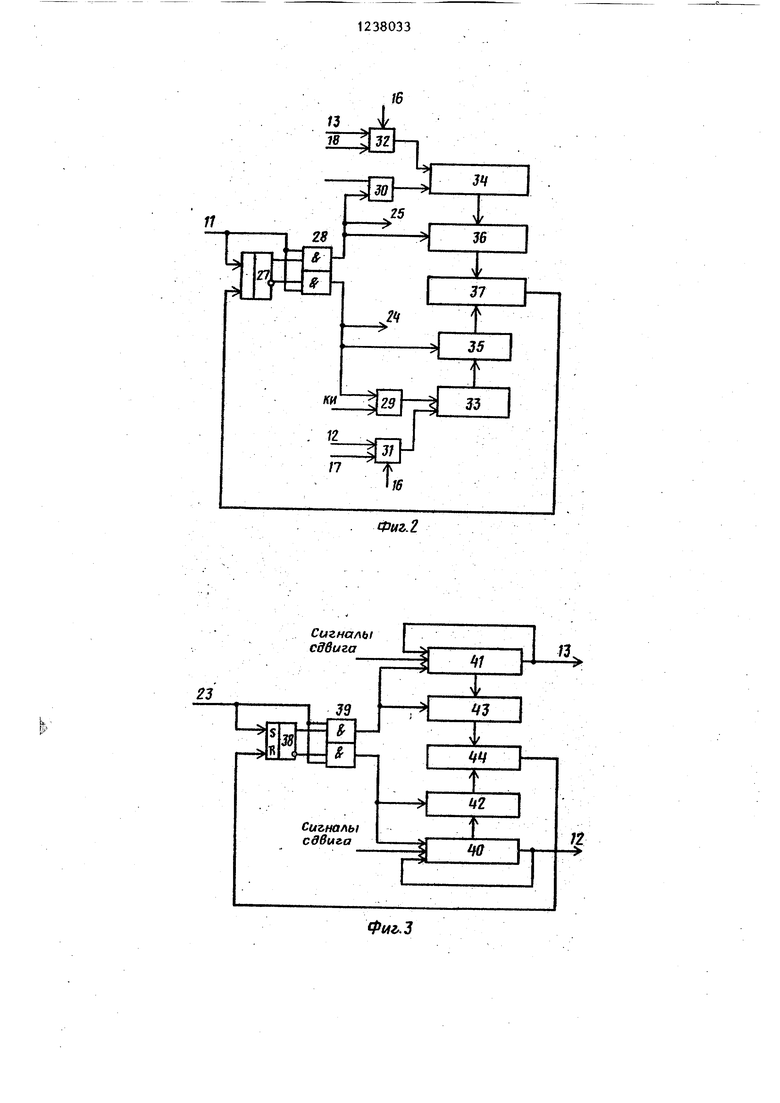
(не показан), 24-26 - выходы устройства. Блок 3 линейно-круговой интерполяции включает узел знака | оценочной функции, состоящий из триггера 27 и двух элементов И 28, двух элементов 29 и 30 совпадения.
38033г
двух одноразрядных сумматоров 31 и 32, регистров 33 и 34 координат, группы элементов 35 и 36 совпадений и суг матора 37 накопительного типа.
5 Ввод исходных данных в регистры координат осуществляется по линиям 12,17 (регистр х) и 13,18 (регистр у) через одноразрядные С5гмматоры 31 и 32, благодаря чему в регистрах
10 устанавливаются значения координат, смещенные на величину поправки, вычисленную в блоке 7.
Блок 7 круговой интерполяции включает RS-триггер 38 и два эле15 мента 39 совпадения, регистры 40 и 41, группу элементов 42 и 43 совпадений и сумматор 44 накопительного типа. Блок работает только в режиме круговой интерполяции, так как
20 вектор коррекции изменяет свое положение лшпь при движении по дуге окружности. Регистры 40 и 41 могут работать в режимах реверсивного счета и сдвига. Первый режим использу25 ется при интерполяции вектора коррекции, второй - при передаче вычисленных значений приращений вектора коррекции из регистров 40 и 41 в регистры 33 и 34 блока 3.
г
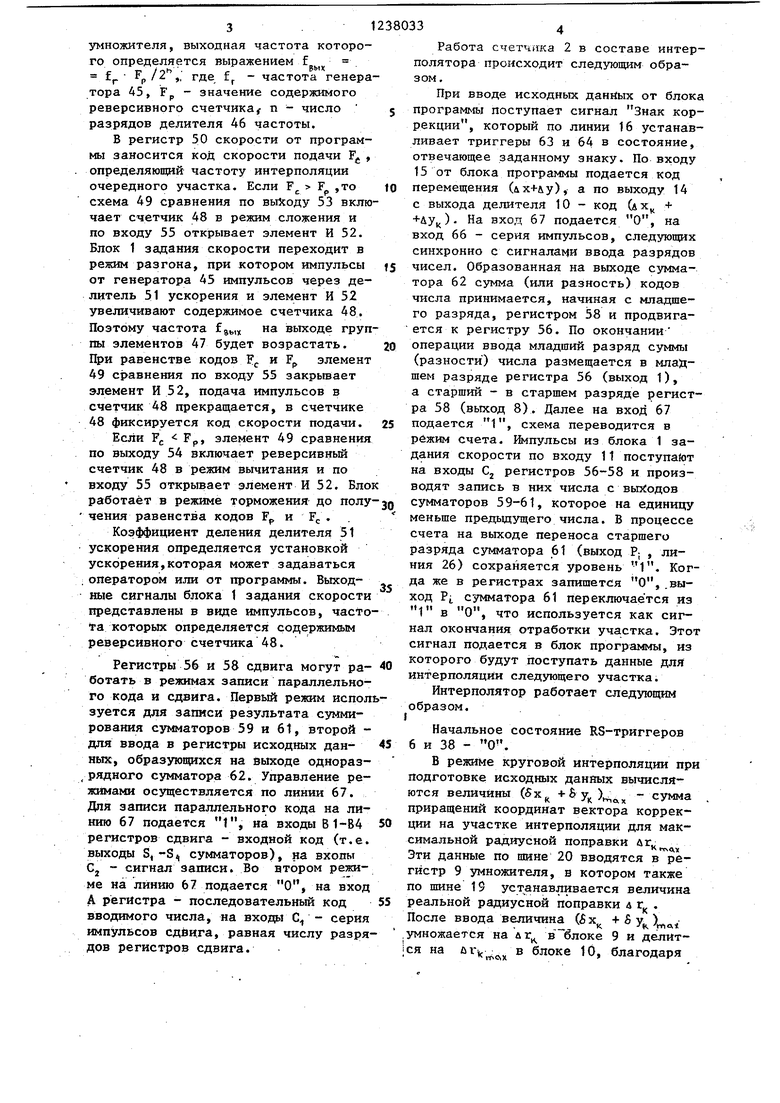
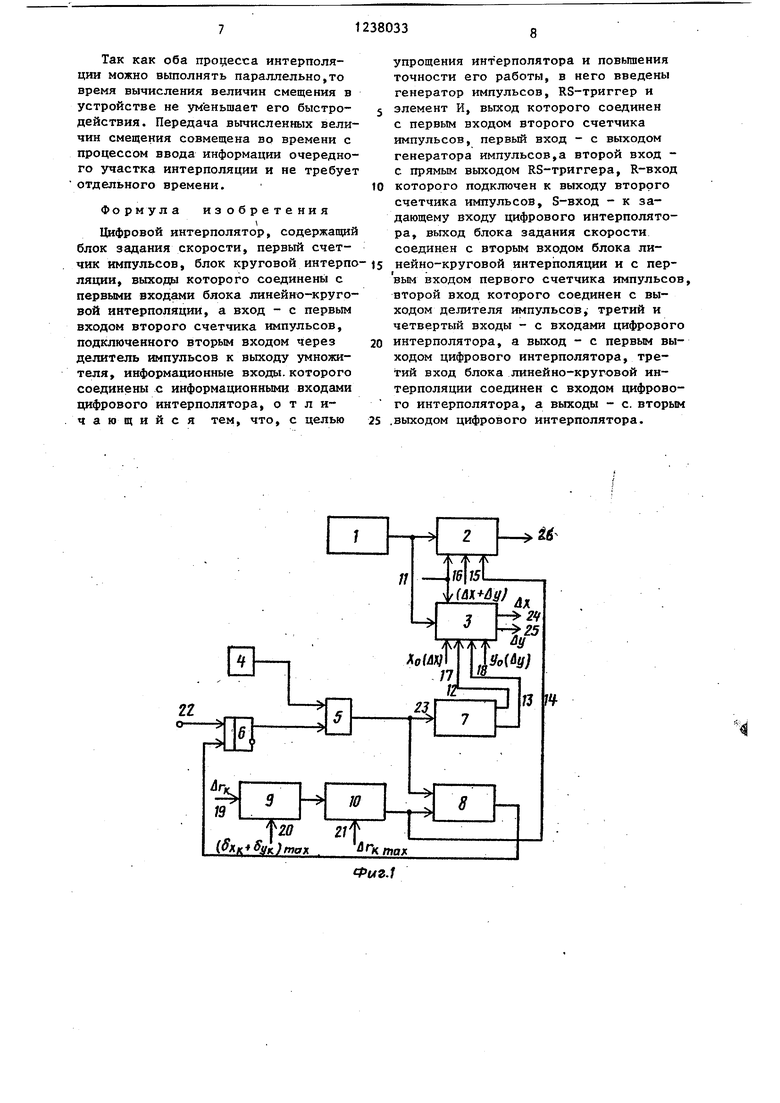
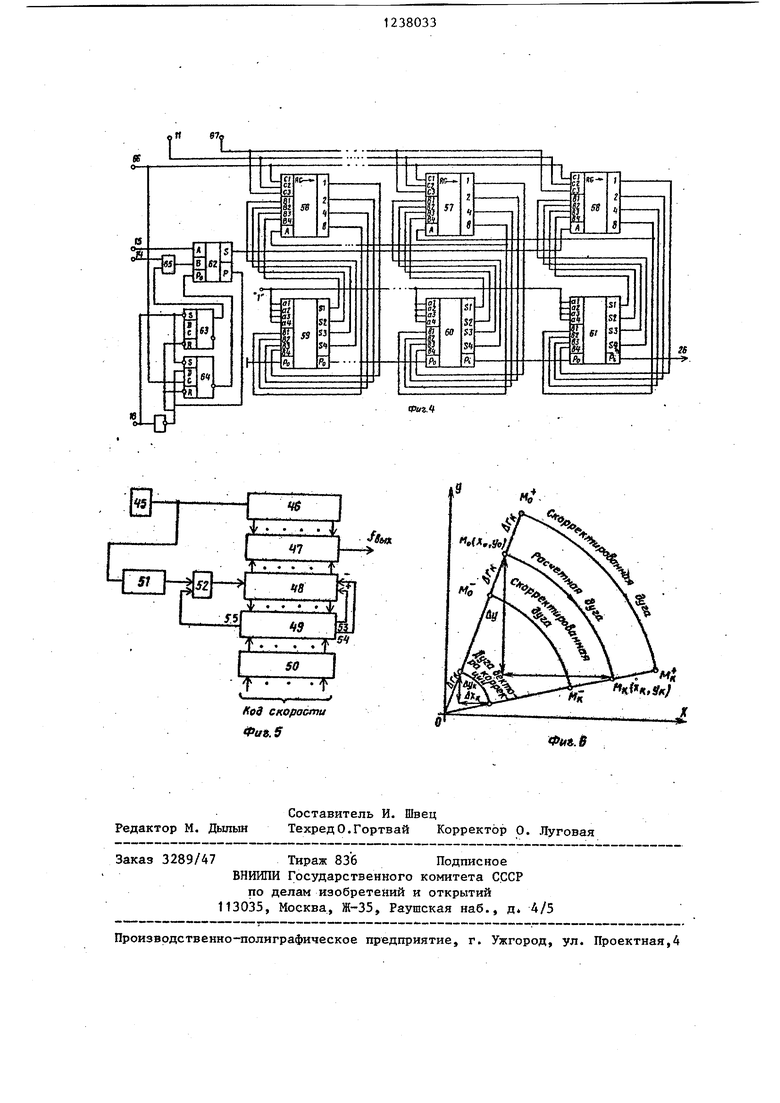
Блок 1 задания скорости содержит генератор 45 импульсов, делитель 46 частоты, группу элементов 47 совпадений, реверсивный счетчик 48, блок 49 сравнения кодов, регистр 50 ско35 рости, делитель 51 ускорения и элемент И 52, выходы 53 и 54, вход 55 элемента И 52. Счетчик 2 импульсов содержит 4-разрядные сдвиговые регистры 56-58, 4-разрядные комбинаци 0 онные сумматоры 59-61, одноразрядный комбинационный сумматор 62, два D-триггера 63 и 64, элемент 65 равнозначности, вход 66 тактирования и вход 67 управления. Делитель 46 час 5 тоты представляет собой двоичный . счетчик, разрядные выходы которого связаны с первыми входами схем 47 совпадений. Вторые входы этих схем управляются сигналами разрядных вы50 ходов реверсивного счетчика 48. Если в реверсивном счетчике записан О, то все элементь 47 закрыты, в противном случае на выходах появляются импульсы, частота которых определя55 ется кодом, содержащимся в реверсивном счетчике 48. Делитель 46 частоты схемы 47 совпадения и реверсивный счетчик 48 образуют схему двоичного
умножителя, выходная частота которого определяется выражением Fp/2
f.
fr BblX
частота генерагде
тора 45, FP - значение содержимого реверсивного счетчика п - число разрядов делителя Д6 частоты.
В регистр 50 скорости от программы заносится код скорости подачи F. , определяющий частоту интерполяции очередного участка. Если F F ,то схема 49 сравнения по вьйсоду 53 включает счетчик 48 в режим сложения и по входу 55 открывает элемент И 52. Блок 1 задания скорости переходит в режим разгона, при котором импульсы от генератора 45 импульсов через делитель 51 ускорения и элемент И 52 увеличивают содержимое счетчика 48.
вЫХ
на выходе груп20
25
Поэтому частота f пы элементов 47 будет возрастать. При равенстве кодов Р и F элемент 49 сравнения по входу 55 закрывает элемент И 52, подача импульсов в счетчик 48 прекращается, в счетчике 48 фиксируется код скорости подачи.
Если FC - Fp, элемент 49 сравнения по выходу 54 включает реверсивный счетчик 48 в режим вычитания и по входу 55 открывает элемент И 52. Блок работает в режиме торможения до полу-з0
чения равенства кодов Fp и F . .
Коэффициент деления делителя 51 ускорения определяется установкой ускорения,которая может задаваться
оператором или от программы. Выходные сигналы блока 1 задания скорости представлены в виде импульсов, частота которых определяется содержимым реверсивного счетчика 48.
Регистры 56 и 58 сдвига могут ра- 40 ботать в режимах записи параллельного кода и сдвига. Первый режим используется для записи результата суммирования сумматоров 59 и 61, второй - для ввода в регистры исходных дан5to fS
35
4S
ных, образующихся на выходе однораз- рядного сумматора 62. Управление режимами осзпцествляется по линии 67. Для записи параллельного кода на линию 67 подается 1, на входы В1-В4 регистров сдвига - входной код (т.е. выходы S,-Зц сумматоров), на входы Gj - сигнал записи. Во втором режиме на линию 67 подается О, на вход А регистра - последовательный код вводимого числа, на входы С - серия импульсов сдвига, равная числу разрядов регистров сдвига.
0
5
0
0 Работа счетчика 2 в составе интерполятора происходит следующим образом.
При вводе исходных данйЫх от блока 5 программы поступает сигнал Знак коррекции, который по линии 16 устанавливает триггеры 63 и 64 в состояние, отвечающее заданному знаку. По входу 15 от блока программы подается код o перемещения (лх+лу), а по выходу 14 с выхода делителя 10 - код Ci х + +Лу). На вход 67 подается О, на вход 66 - серия импульсов, следующих синхронно с сигналами ввода разрядов S чисел. Образованная на выходе сумматора 62 сумма (или разность) кодов числа принимается, начиная с младшего разряда, регистром 58 и продвигается к регистру 56. По окончании операции ввода младший разряд суммы (разности) числа размещается в младшем разряде регистра 56 (выход 1), а старший - в старшем разряде регистра 58 (выход 8). Далее на вход 67 подается 1, схема переводится в режим счета. Шпульсы из блока 1 задания скорости по входу 11 поступайт на входы Cj регистров 56-58 и производят запись в них числа с выходов сумматоров 59-61, которое на единицу меньше предьщущего числа. В процессе счета на выходе переноса старшего разряда сумматора 61 (выход Р, , линия 26) сохраняется уровень 1. Когда же в регистрах запишется О,.выход PL сумматора 61 переключается из 1 в О, что используется как сигнал окончания отработки участка. Этот сигнал подается в блок программы, из которого будут поступать данные для интерполяции следующего участка.
Интерполятор работает следующим образом.
I
Начальное состояние RS-триггеров 6 и 38 - О.
В режиме круговой интерполяции при подготовке исходных данных вычисляются величины (5х УК ьп,о.х сумма приращений координат вектора коррек- ции на участке интерполяции для максимальной радиусной поправки л г..
Х1(
Эти данные по щине 20 вводятся в регистр 9 умножителя, в котором также по шине 19 устанавливается величина реальной радиусной поправки д г . После ввода величина (Sx УК гл
к rrta
И делит. умножается на йг„ в блоке 9
iГ
|ся на й1..а« блоке 10, благодаря
чему осуществляется приведение расчетного «перемещения по дуге вектора коррекции максимального радиуса Krv,ax реальной радиусной поправке, Эти данные по установочным входам вводятся в счетчик 8. В блок 2 вводится сумма перемещений (лх + и у) по координатам х и У ДУги на участк интерполяции, задаются код скорости в блок 1 и знак коррекции эквиди- станты в блоки 2 и 3.
Если интерполятор работал в режиме коррекции эквидистанты, то на предыдущем участке вычислены координаты вектора коррекции, отвечающие начальной точке Хд, у очередного участка интерполяции. Эти данные хранятся в регистрах координат АХ и ду блока 7. В процессе ввода исход- ных данных в блок 3 по линиям 12 и 13 они подаются на вторые входы входных одноразрядных сумматоров блока 3 и в зависимости от знака коррекции увеличивают или уменьшают значения х,, и у . Аналогично производится изменение содержимого счетчика 2 по данным делителя 10, окото- рые подаются по линии 14.
По окончании операций ввода триг- гер 6 по линии 22 устанавливается в 1, открывается схема И 5 и через нее от генератора 4 на блок 7 и счетчик 8 начинают поступать импульсы с максимальной частотой, определяв- мой разрешающей способностью элементов схемы. Блок 7 ведет интерполяцию вектора коррекции радиуса л г до конечной точки, которая определяется введенной в счетчик 8 величиной (Sx Sy )„ 4Г, /дг. Как только эта точка достигнута, счетчик 8 переполняется, сбрасывает RS-триггер 6 и закрывает элемент И 5.
По условиям точности ввод вектора коррекции осуществляется вдоль одной из осей координат. В этом случае векто) коррекции задан точно, ибо точка (о, Аг) или (дг,о ) всегда целочисленна относительно шага интерполяции. Операция ввода вектора производится от блока программы при появлении команды Ввод коррекций. . Далее вектор разворачивается на не- . обходимый УГОЛ. Выход вектора в ко- нечную точку определяется суммой перемещения (лх 1 + которая фиксируется в счетчике 8. Так как сигна,
s е 10
15 20 25
30 35Q 50
лы с выхода элемента И 5 подаются одновременно на блок 7 интерполяции вектора коррекции и счетчик импульсов 8. Работающий на вычитание,, то с переполнением счетчика импульсов В RS-триггер 6 сбрасывается, закрывается элемент И 5, интерполяция прекращается. За время интерполяции на блок 7 (так же как в блок 8) поступает (ьх + УК импульсов. Метод оценочной функции, принятый для построения блока 7, обеспечивает точный выход вектора в конечную точку интерполяции. Далее запускается блок 1, который посылает импульсы заданной частоты на блок 3 и счетчик 2. Производится интерполяция дуги, скорректированной на величину т до момента переполнения счетчика 2. Ш- пульс переполнения останавливает процесс отработки участка.
В режиме линейной интерполяции коррекция не производится. Работают блоки 1, 2 и 3, исходными данными являются проекции координат ь х и лу на участке отработки и их сумма.
В данном устройстве возможно совмещение процессов вычисления координат конечной точки вектора коррекции и интерполяции скорректированной эквидистанты, поскольку к моменту ввода информации о новом участке отработки положение вектора коррекции известно точно.
При работе устройства импульсы с выхода блока 1 задания скорости по входу 11 поступают на первые входы элементов И 28 и S-вход триггера 27. В зависимости от знака оценочной функции О плюс - RS-триггер 27 в состоянии О, минус - в состоянии 1) эти импульсы передают содержимое того или другого регистра координат (33 и 34) через группы элементов совпадений 35 или 36 в сумматор-накопитель 37. В сумматоре производится вычисление нового значения оценочной функции. Если оце- ночная функция становится положительной, то сумматор переполняется и RS-триггер 27 сбрасьшается. Элементы И 29 и 30 открыты только в режиме круговой интерполяции. Через них производится изменение на 1 содержимого регистров 33 и 34 координат после каждого шага по соответ-: ствующей оси.
Так как оба процесса интерполяции можно выполнять параллельно,то время вычисления величин смещения в устройстве не уменьшает его быстродействия. Передача вычисленных величин смещения совмещена во времени с процессом ввода информации очередного участка интерполяции и не требует отдельного времени.
Формула изобретения
Цифровой интерполятор, содержащий
блок задания скорости, первый счетчик импульсов, блок круговой интерпо ляции, выходы которого соединень с первыми входами блока линейно-круговой интерполяции, а вход - с первым входом второго счетчика импульсов, подключенного вторым входом через делитель импульсов к выходу умножителя, информационные входьь которого соединены с информационными входами цифрового интерполятора, отличающийся тем, что, с целью
2Z o-
4o
19
fzo
)тах
ггг
i
0
5 0 5
упрощения инт ерполятора и повышения точности его работы, в него введены генератор импульсов, RS-триггер и элемент И, выход которого соединен с первым входом второго счетчика импульсов, первый вход - с выходом генератора импульсов,а второй вход - с прямым выходом RS-триггера, R-вход которого подключен к выходу второго счетчика импульсов, S-вход - к задающему входу цифрового интерполятора, выход блока задания скорости соединен с вторым входом блока линейно-круговой интерполяции и с первым входом первого счетчика импульсов, второй вход которого соединен с выходом делителя импульсов, третий и четвертый входы - с входами цифрового интерполятора, а выход - с первым выходом цифрового интерполятора, третий вход блока линейно-круговой интерполяции соединен с входом цифрового интерполятора, а выходы - с. вторым .выходом цифрового интерполятора.
//
r/p/ i
J6 15MM Hf j
24 25
y
9о{йу}
pl;j
i
йп
Krngjf
Фмг.1
Фиг.3
7
I
г-fS
Код скорости Фа. 9
-fSut.
«;
f.St)
Фм.ё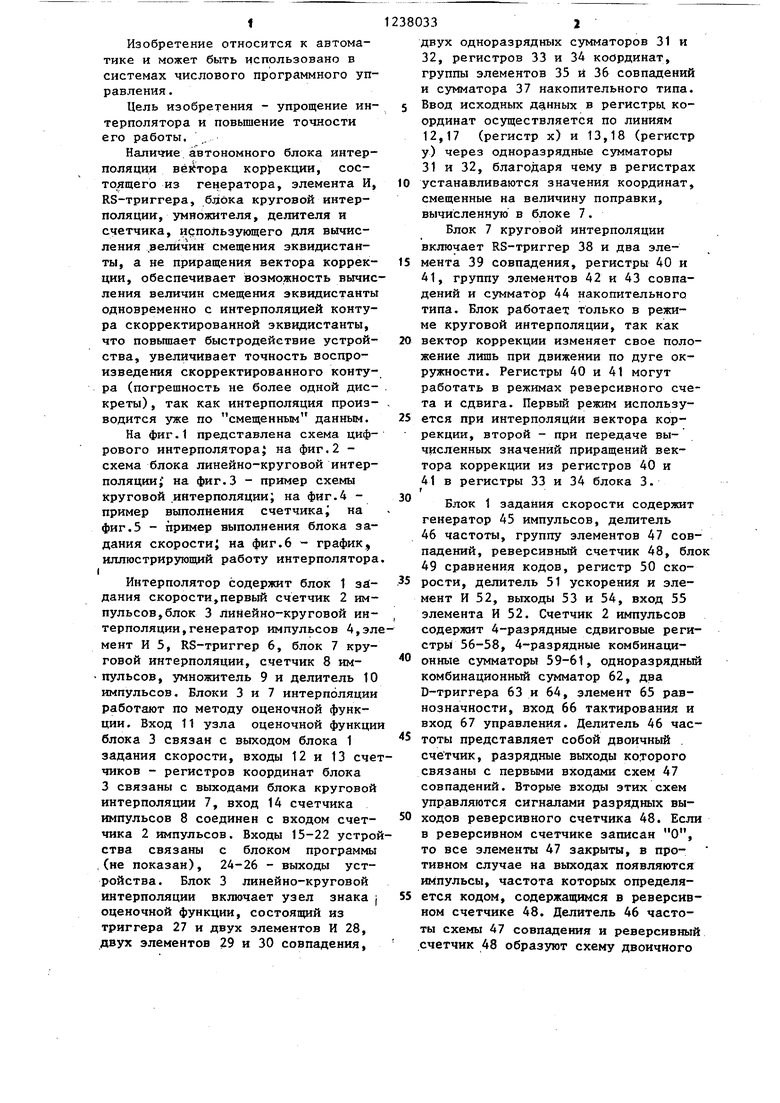
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
| Многокоординатный линейно-круговой интерполятор | 1984 |
|
SU1156008A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Интерполятор | 1988 |
|
SU1541557A1 |
| Цифровой интерполятор | 1981 |
|
SU1003022A1 |
| Устройство для коррекции эквидистанты | 1991 |
|
SU1803904A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU807236A1 |
| Линейно-круговой интерполятор | 1984 |
|
SU1215090A2 |
| Устройство для программного управления | 1985 |
|
SU1290263A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU860004A2 |
Изобретение относится к области автоматики и может быть использовано в системах числового программного зшравления. Целью изобретения является упрощение интерполятора и повышение точности его 1 аботы. Наличие автономного блока интерполяции вектора коррекции, использующего для вычисления величин смещения эквидистанты, а не приращения вектора коррекции, обеспечивает устройству новое свойство - возможность вычисления величин смещения эквидистанты одновременно с интерполяцией контура скорректированной эквидистанты, что повьш1ает быстродействие устройства, увеличивает точность воспроизведения скорректированного контура, так как интерполяция производится уже по смещенным данным. Цифровой интерполятор содержит блок задания скорости,счетчики импульсов, блок линейно-круговой интерполяции, генератор импульсов, блок круговой интерполяции, умножитель, делитель импульсов, элемент И, RS-триггер. Блоки круговой и линейно-круговой интерполяции работают по методу оценочной функции. Оба процесса интерполяции можно выполнять параллельно, поэтому время вычисления величин смещения в устройстве не уменьшает его быстродействия. Передача же вычисленных величин смещения совмещена во времени с процессом ввода информации очередного участка интерполяции и отдельного времени не требует. 6. ил. i W ю О9 00 О 00 СдЭ
Составитель И. Швец Редактор М. Дыльш Техред О. Гортвай Корректор О. Луговая
Заказ 3289/47 Тираж 836 Подписное
ВНИШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
| Программное управление станками /Под ред | |||
| В.Л; | |||
| Сосонкина | |||
| - М.: Машиностроение, 1981, с | |||
| Прибор для измерения силы звука | 1920 |
|
SU218A1 |
| Многокоординатный линейно-круговой интерполятор | 1978 |
|
SU746428A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
