Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах числового программного управления токарными станками.
Цель изобретения - расширение функциональных возможностей интерполятора , за счет обеспечения возможности нарезания цилиндрических и конических резьб.
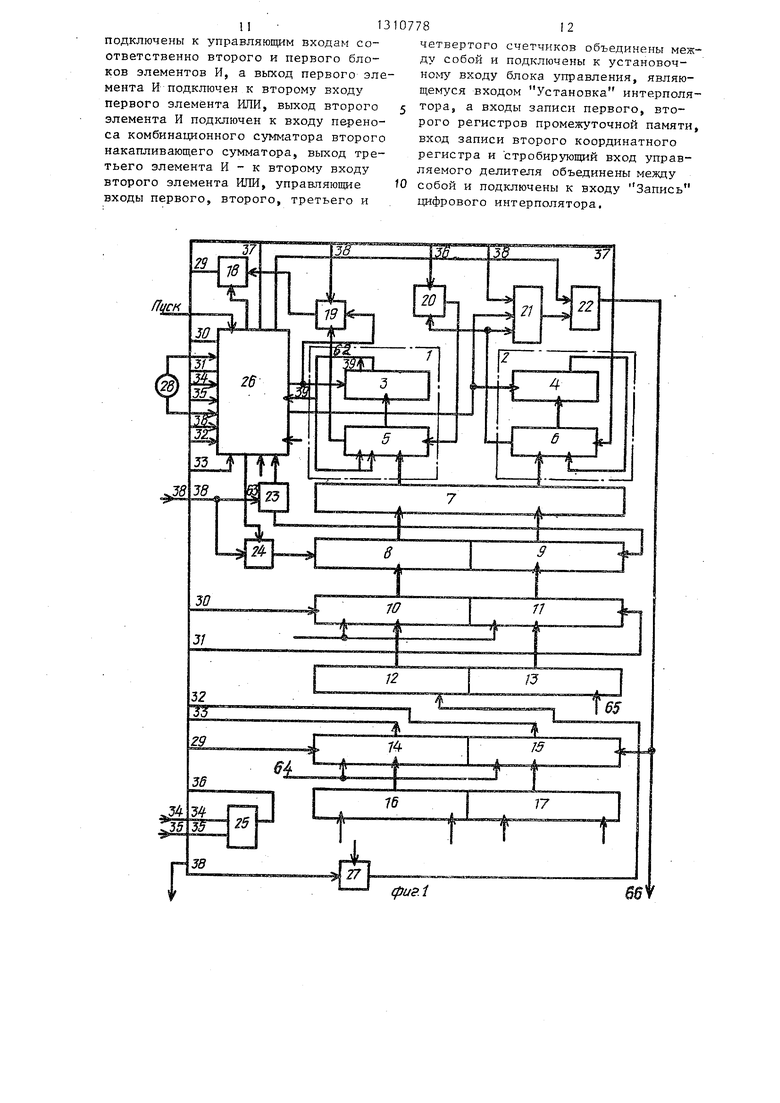
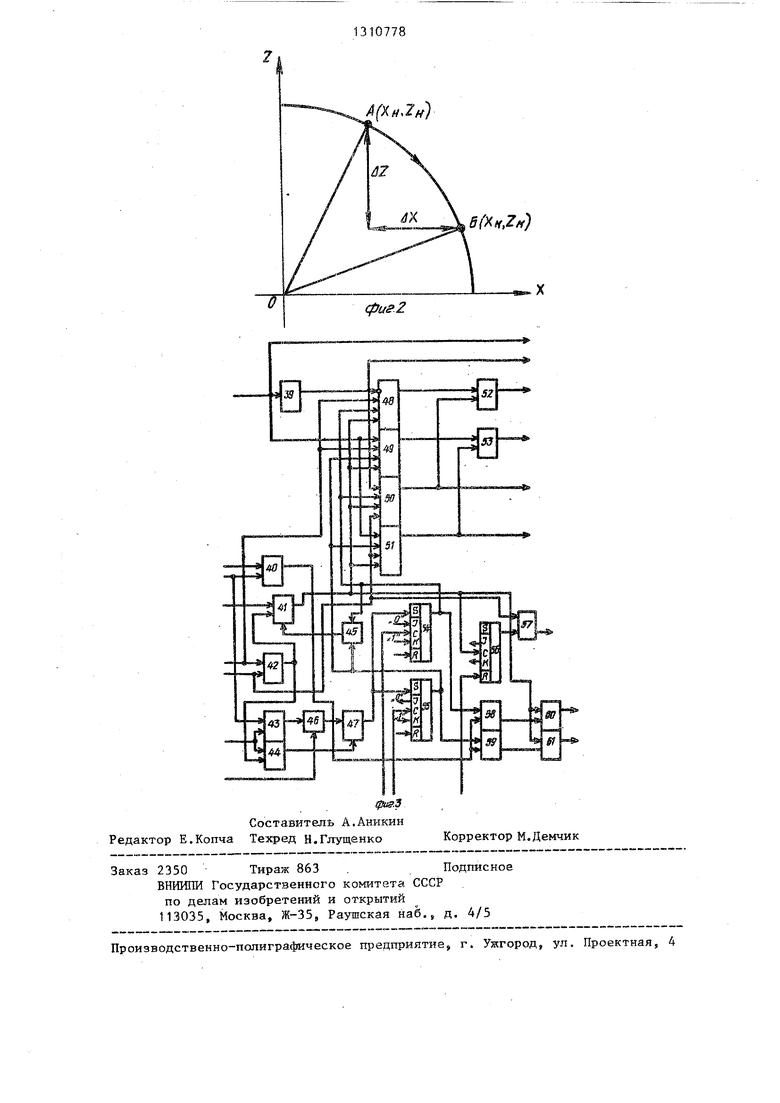
На фиг. 1 изображена структурная схема интерполятора-, на фиг. 2 - схемаJ поясняющая работу цифрового интерполятора при круговой интерпо- (ляции на фиг. 3 - пример вьшопнения схемы - блока управления.
Интерполятор (фиг. 1) состоит из первого 1 и второго 2 накапливающих сумматоров, состоящих из регистров 3 и 4, выполненных на 1К-триггерах, работающих по заднему фронту синхроимпульса, и комбинационных сумматоров 5 и 6, блока 7 элементов ИЛИ, первого 8 и второго 9 блоков элемен- тов И, первого 10 и второго 11 счетчиков, первого 12 и второго 13 координатных регистров, третьего 14 и четвертого 15 счетчиков, первого 16 и второго 17 регистров промежуточной памяти, первого элемента ШШ 18, первого 19, второго 20, третьего 21 элементов И, второго .22, третьего 23 четвертого 24, пятого 25 элементов
больше, чем разрядность интерполятора при резьбонарезании. Для нарезания конических резьб необходимо иметь Два интерполятора с сеткой в двенадцать разрядов, а в интерполяторе по оценочной функции имеется один интерполятор с разрядной сеткой в 24 разряда. Следовательно, если в режимах круговой и линейной интерполяции накапливающие сумматоры 1 и 2 использовать как единое целое, а в режиме резьбонарезания как два независимых сумматора по двенадцать разрядов, то этим достигается посИЛИ, блока 26 управления управляемо- 35 тавленная цель, без дополнительных го делителя 27. датчика 28 резьбо- затрат оборудования обеспечивается а также содержит выход 29
нарезания, канала координаты Z, первый 30 и вто- .рой 31 выходы блока 26 управления, второй 32 и первый 33 входы блока 26 управления, вход 34 интерполятора Круговая интерполяция, вход 35 интерполятора Линейная интерполяция, выход 36 пятого элемента ИЛИ 25, шестой 37 выход блока управления, вход 38 Резьбонарезанне интерполятора.
Блок управления (фиг. 3) состоит из элемента-НЕ 39, элементов И 40 и 41, элемента ИЛИ 42, элементов И 43 и 44, элемента ИЛИ 45, синхронизатора 46, элемента ИЛИ 47, элементов И 48-51, элементов ИЛИ 52 и 53, триг45
нарезание цилиндрических и коничес- . ких резьб (при объеме оборудования,
соответствующем двухкоординатному интерполятору по оценочной функции).
Цифровой интерполятор работает следующим образом.
В режиме линейной интерполяции информация распределяется по блокам интерполятора следующим образом.
В регистры 16 и 17 промежуточной памяти заносятся величины uZ, йХ в дополнительном коде в первый 12 координатный регистр заносится величина UZ в дополнительном коде, а во второй 13 координатный регистр - величина йХ в прямом коде. Для сокращения числа связей регистры 12, 13, 16 и 17 выполняются сдвиговыми и за50
геров 54-56, элементов И 57-59, эле- несение информации в них осуществляментов ИЛИ 60 и 61, выход 67. первого накапливающего сумматора 1, вход 63 Тактовая частота интерполятора.
вход 64 Установка интерполятора, вход 65 Запись цифрового интерполятора, выход 66 канала координаты X.
Работа интерполятора в режиме резь- бонарезания основана на том, что датчики резьбонарезания вырабатывают за один оборот шпинделя 2048 или 4096 импульсов, поэтому для осуществления резьбонарезания необходим интерполятор с периодом (внутренней константой) 2048 или 4096, что соответствует одиннадцати- или двенадцатиразряд7 ному сумматору. Линейно-круговые интерполяторы современных систем ЧПУ работают с диапазоном представляемых величин не менее, чем 9999999, что соответствует диапазону двоичных чисел 2 . Таким образом, разрядность интерполятора в режиме линейной и .0 круговой интерполяции в два раза
больше, чем разрядность интерполятора при резьбонарезании. Для нарезания конических резьб необходимо иметь Два интерполятора с сеткой в двенадцать разрядов, а в интерполяторе по оценочной функции имеется один интерполятор с разрядной сеткой в 24 разряда. Следовательно, если в режимах круговой и линейной интерполяции накапливающие сумматоры 1 и 2 использовать как единое целое, а в режиме резьбонарезания как два независимых сумматора по двенадцать разрядов, то этим достигается пос0
5 тавленная цель, без дополнительных затрат оборудования обеспечивается
35 тавленная цель, без дополнительных затрат оборудования обеспечивается
45
нарезание цилиндрических и коничес- . ких резьб (при объеме оборудования,
соответствующем двухкоординатному интерполятору по оценочной функции).
Цифровой интерполятор работает следующим образом.
В режиме линейной интерполяции информация распределяется по блокам интерполятора следующим образом.
В регистры 16 и 17 промежуточной памяти заносятся величины uZ, йХ в дополнительном коде в первый 12 координатный регистр заносится величина UZ в дополнительном коде, а во второй 13 координатный регистр - величина йХ в прямом коде. Для сокращения числа связей регистры 12, 13, 16 и 17 выполняются сдвиговыми и за50
несение информации в них осуществляется последовательным кодом младпшми разрядами за 24 тактовых импульса 11- 24, поступающих по входу 65 Запись
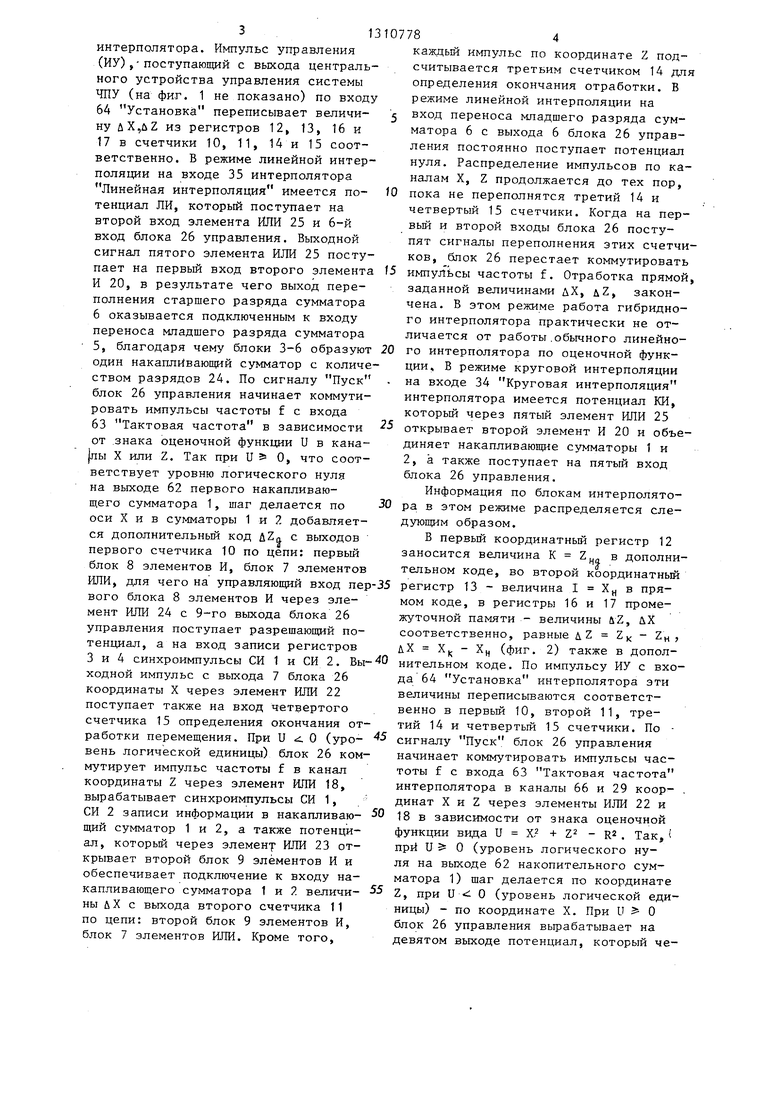
интерполятора. Иьятульс управления (ИУ), поступающий с выхода центрального устройства управления системы ЧПУ (на фиг. 1 не показано) по входу 64 Установка переписывает величину uX,uZ из регистров 12, 13, 16 и 17 в счетчики 10, 11, 14и 15 соответственно. В режиме линейной интерполяции на входе 35 интерполятора Линейная интерполяция имеется потенциал ЛИ, который поступает на второй вход элемента ИЛИ 25 и 6-й вход блока 26 управления. Выходной сигнал пятого элемента ИЛИ 25 поступает на первый вход второго элемента И 20, в результате чего выход переполнения старшего разряда сумматора 6 оказывается подключенным к входу переноса младшего разряда сумматора
30
5, благодаря чему блоки 3-6 образуют 20 го интерполятора по оценочной функ- один накапливающий сумматор с количе- ции, В режиме круговой интерполяции ством разрядов 24. По сигналу Пуск . на входе 34 Круговая интерполяция блок 26 управления начинает коммути- интерполятора имеется потенциал КИ, ровать импульсы частоты f с входа 63 Тактовая частота в зависимости от знака оценочной функции U в кана- |лы X или Z. Так при U О, что соответствует уровню логического нуля на выходе 62 первого накапливающего сумматора 1, шаг делается по оси X и в сумматоры 1 и 2 добавляется дополнительный код uZn с выходов первого счетчика 10 по цепи: первый блок 8 элементов И, блок 7 элементов
ИЛИ, для чего на управляющий вход пер-35 регистр 13 - величина I Х в пря- вого блока 8 элементов И через элемент ИЛИ 24 с 9-го выхода блока 26 управления поступает разрешающий потенциал, а на вход записи регистров
3 и 4 синхроимпульсы СИ 1 и СИ 2. нительном коде ходной импульс с выхода 7 блока 26 координаты X через элемент ИЖ 22 поступает также на вход четвертого счетчика 15 определения окончания откоторый через пятый элемент ИЛИ 25 открывает второй элемент И 20 и объ диняет накапливающие сумматоры 1 и 2, а также поступает на пятый вход блока 26 управления.
Информация по блокам интерполятора в этом режиме распределяется следующим образом.
В первый координатньй регистр 12 заносится величина К Z. в дополни тельном коде, во второй координатный
я
мом коде, в регистры 16 и 17 промежуточной памяти - величины uZ, йХ соответственно, равные AZ Z - ZH дХ Х| - Х (фиг. 2) также в дополПо импульсу ИУ с вхо да 64 Установка интерполятора эти величины переписываются соответственно в первый 10, второй 11, третий 14 и четвертый 15 счетчики. По работки перемещения. При U «с О (уро- сигналу Пуск блок 26 управления
вень логической единицы) блок 26 коммутирует импульс частоты f в канал координаты Z через элемент ИЛИ 18, вырабатывает синхроимпульсы СИ 1, СИ 2 записи информации в накапливающий сумматор 1 и 2, а также потенциал, которьм через элемен-р ИЛИ 23 открывает второй блок 9 элементов И и обеспечивает подключение к входу накапливающего сумматора 1 и 2 величины и X с выхода второго счетчика 11 по цепи: второй блок 9 элементов И, блок 7 элементов ИЛИ. Кроме того.
начинает коммутировать импульсы частоты f с входа 63 Тактовая частота интерполятора в каналы 66 и 29 координат X и Z через элементы ИЛИ 22 и
50 18 в зависимости от знака оценочной функции вида U X + Z - Rz. Так, при и О (уровень логического нуля на выходе 62 накопительного сумматора 1) шаг делается по координате
Z, при и i О (уровень логической еди ницы) - по координате X. При U О блок 26 управления вьфабатывает на девятом выходе потенциал, который че
107784
каждьш импульс по координате Z подсчитывается третьим счетчиком 14 для определения окончания отработки. В режиме линейной интерполяции на
вход переноса младшего разряда сумматора 6 с выхода 6 блока 26 управления постоянно поступает потенциал нуля. Распределение импульсов по каналам X, Z продолжается до тех пор,
Ю пока не переполнятся третий 14 и
четвертый 15 счетчики. Когда на пер- вьш и второй входы блока 26 поступят сигналы переполнения этих счетчиков, блок 26 перестает коммутировать
5 импульсы частоты f. Отработка прямой, заданной величинами дХ, iZ, закончена. В этом режиме работа гибридного интерполятора практически не отличается от работы.обычного линейно
го интерполятора по оценочной функ- ции, В режиме круговой интерполяции на входе 34 Круговая интерполяция интерполятора имеется потенциал КИ,
регистр 13 - величина I Х в пря-
нительном коде
который через пятый элемент ИЛИ 25 открывает второй элемент И 20 и объединяет накапливающие сумматоры 1 и 2, а также поступает на пятый вход блока 26 управления.
Информация по блокам интерполятора в этом режиме распределяется следующим образом.
В первый координатньй регистр 12 заносится величина К Z. в дополнительном коде, во второй координатный
я
мом коде, в регистры 16 и 17 промежуточной памяти - величины uZ, йХ соответственно, равные AZ Z - ZH дХ Х| - Х (фиг. 2) также в дополПо импульсу ИУ с входа 64 Установка интерполятора эти величины переписываются соответственно в первый 10, второй 11, третий 14 и четвертый 15 счетчики. По сигналу Пуск блок 26 управления
начинает коммутировать импульсы частоты f с входа 63 Тактовая частота интерполятора в каналы 66 и 29 коор . динат X и Z через элементы ИЛИ 22 и
18 в зависимости от знака оценочной функции вида U X + Z - Rz. Так, при и О (уровень логического нуля на выходе 62 накопительного сумматора 1) шаг делается по координате
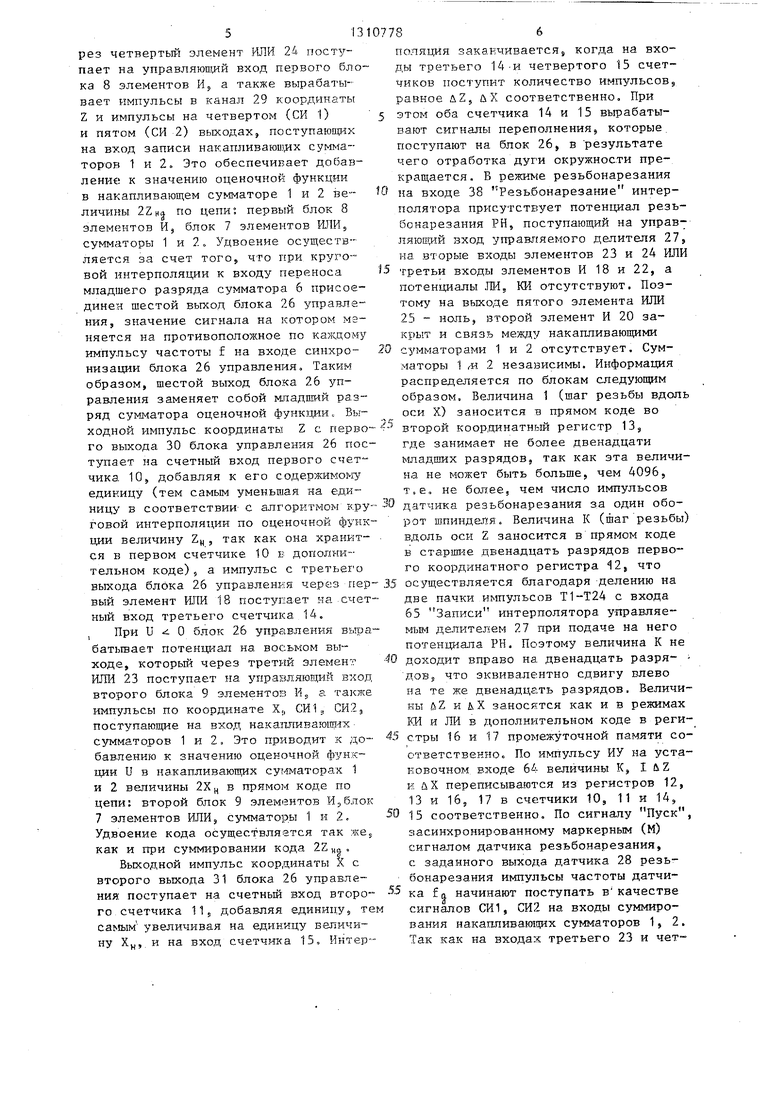
Z, при и i О (уровень логической единицы) - по координате X. При U О блок 26 управления вьфабатывает на девятом выходе потенциал, который через четвертый элемент ИЛИ 2Д поступает на управляюаукй вход первого блока 8 элементов И а также вырабатывает импульсы в канал 29 координаты Z и импульсы на четвертом (СИ 1) и пятом (си 2) выходах, поступаюпщх на вход записи накапливаюищх сумматоров 1 и 2 . Это обеспечивает добавление к значению оценочной функции в накапливающем сумматоре 1 и 2 величины 1Ъ«л по цепи: первый блок 8
а
элементов И, блок 7 элементов ШШг сумматоры 1 и 2о Удвоение осуществляется за счет того, что при круговой интерполяции к входу переноса младшего разряда сумматора 6 присоединен шестой выход блока 26 управления, значение сигнала на котором меняется на противоположное по каж,аому импульсу частоты f на входе синхронизации блока 26 управления. Таким образом, шестой выход блока 26 управления заменяет собой кпадший разряд сумматора оценочной функтдни. Выходной импульс координаты Z с перво го выхода 30 блока управления 26 поступает на счетный вход первого счетчика. 10, добавляя к его содержимому единицу (тем самым уменьшая на еди10
15
20
поляция закакчиваетсяа когда на входы третьего 14-и четвертого 15 счетчиков поступит количество импульсовj равное uZ, йХ соответственно. При этом оба счетчика 14 и 15 вырабатывают сигналы переполнения, которые. поступают на блок 26, в результате чего отработка дуги окружности прекращается. Б резьбонарезания на входе 38 Резьбонарезание интерполятора присутствует потенциал резьбонарезания РН, поступающий на управляющий вход управхсяемого делителя 27, на вторые входы элементов 23 и 24 ИЛИ третьи входы элементов И 18 и 22, а потенциалы .Ш, КИ отсутствуют. Поэтому на выходе пятого элемента ИЛИ 25 ноль, второй элемент И 20 закрыт и связь между накапливающими сумматорами 1 и 2 отсутствует. Сумматоры 1 ж 2 независимы. Информация распределяется по блокам следующим образом. Величина 1 (шаг резьбы вдоль оси X) заносится в прямом коде во второй координатньй регистр 13, где занимает не более двенадцати младпшх разрядов, так как эта величина не может быть больше, чем 4096, т,в, не более, чем число импульсов
ницу в соответствии с алгоритмом кру-- - датчика резьбонарезания за один обо- говой интерполяции по оценочной функции величину Zu , так как она XPEIHHT н.
ся в первом счетчике 10 в дополнительном коде) 5 а импульс с третьег о
рот шпинделя. Величина К (шаг резьбы) вдоль оси Z заносится в прямом коде в старшие двенадцать разрядов перво го координатного регистра 12, что
выхода блока 26 управления через пер-35 осуществляется благодаря делению на
счет- две пачки и fflyльcoв Т1-Т24 с входа 65 Записи интерполятора управляе мым делителем 27 при подаче на него потенциала РН, Поэтому величина К не
вый элемент ИЛИ 18 поступает на ный вход третьего счетчика 14.
При и О блок 26 управления вьтрЯ батьшает потенциал на восьмом выходе, который через третий элемен:г ШШ 23 поступает на управляющий вход второго блока 9 элементов И,; а таклсе импульсы по координате X,, СИ1,, СИ2з поступающие на вход накаипиваюишх сумматоров 1 и 2. Это приводит к до- бав.лению к значению оценочной функции и в накапливающих суг-шаторах 1 и 2 величины 2Х ц в прямом коде по цепи: второй блок 9 элементов И,блок 7 элементов ИЛИ, сумматоры 1 и 2. Удвоение кода осуществляется так Kej как и при суммировании кода 2Z„.
Выходной импульс координаты X с второго выхода 31 блока 26 управления поступает на счетный вход второго счетчика 11, добавляя единицу, тем самым увеличивая на единицу величи45
доходит вправо на двенадцать разря- дов что эквивалентно сдвигу влево на те же двенадцать разрядов. Величины uZ и ь.Х заносятся как и в режимах КИ и Л1-1 в дополнительном коде в регистры 16 и 17 промежуточной памяти соответственно. По импульсу ИУ на установочном входе 64 величины К, I &Z и аХ переписываются из регистров 12, 13 и 16, 17 в счетчики 10, 11 и 14, 15 соответственно. По сигналу Пуск, засинхронированному маркерным (М) сигналом датчика резьбонарезания, с заданного выхода датчика 28 резьбонарезания импульсы частоты датчи5-5 ка f о начинают поступать в качестве сигналов СИ1, СИ2 на входы суммирования накап.пиваю1 щх сумматоров 1, 2. Так как на входах третьего 23 и чет50
ну X,
на вход счетчика 15, Интер
5
0
поляция закакчиваетсяа когда на входы третьего 14-и четвертого 15 счетчиков поступит количество импульсовj равное uZ, йХ соответственно. При этом оба счетчика 14 и 15 вырабатывают сигналы переполнения, которые. поступают на блок 26, в результате чего отработка дуги окружности прекращается. Б резьбонарезания на входе 38 Резьбонарезание интерполятора присутствует потенциал резьбонарезания РН, поступающий на управляющий вход управхсяемого делителя 27, на вторые входы элементов 23 и 24 ИЛИ третьи входы элементов И 18 и 22, а потенциалы .Ш, КИ отсутствуют. Поэтому на выходе пятого элемента ИЛИ 25 ноль, второй элемент И 20 закрыт и связь между накапливающими сумматорами 1 и 2 отсутствует. Сумматоры 1 ж 2 независимы. Информация распределяется по блокам следующим образом. Величина 1 (шаг резьбы вдоль оси X) заносится в прямом коде во второй координатньй регистр 13, где занимает не более двенадцати младпшх разрядов, так как эта величина не может быть больше, чем 4096, т,в, не более, чем число импульсов
датчика резьбонарезания за один обо-
рот шпинделя. Величина К (шаг резьбы) вдоль оси Z заносится в прямом коде в старшие двенадцать разрядов перво го координатного регистра 12, что
оходит вправо на двенадцать разря- ов что эквивалентно сдвигу влево на те же двенадцать разрядов. Величины uZ и ь.Х заносятся как и в режимах КИ и Л1-1 в дополнительном коде в регистры 16 и 17 промежуточной памяти соответственно. По импульсу ИУ на установочном входе 64 величины К, I &Z аХ переписываются из регистров 12, 13 и 16, 17 в счетчики 10, 11 и 14, 15 соответственно. По сигналу Пуск, засинхронированному маркерным (М) сигналом датчика резьбонарезания, с заданного выхода датчика 28 резьбонарезания импульсы частоты датчика f о начинают поступать в качестве сигналов СИ1, СИ2 на входы суммирования накап.пиваю1 щх сумматоров 1, 2. Так как на входах третьего 23 и чет
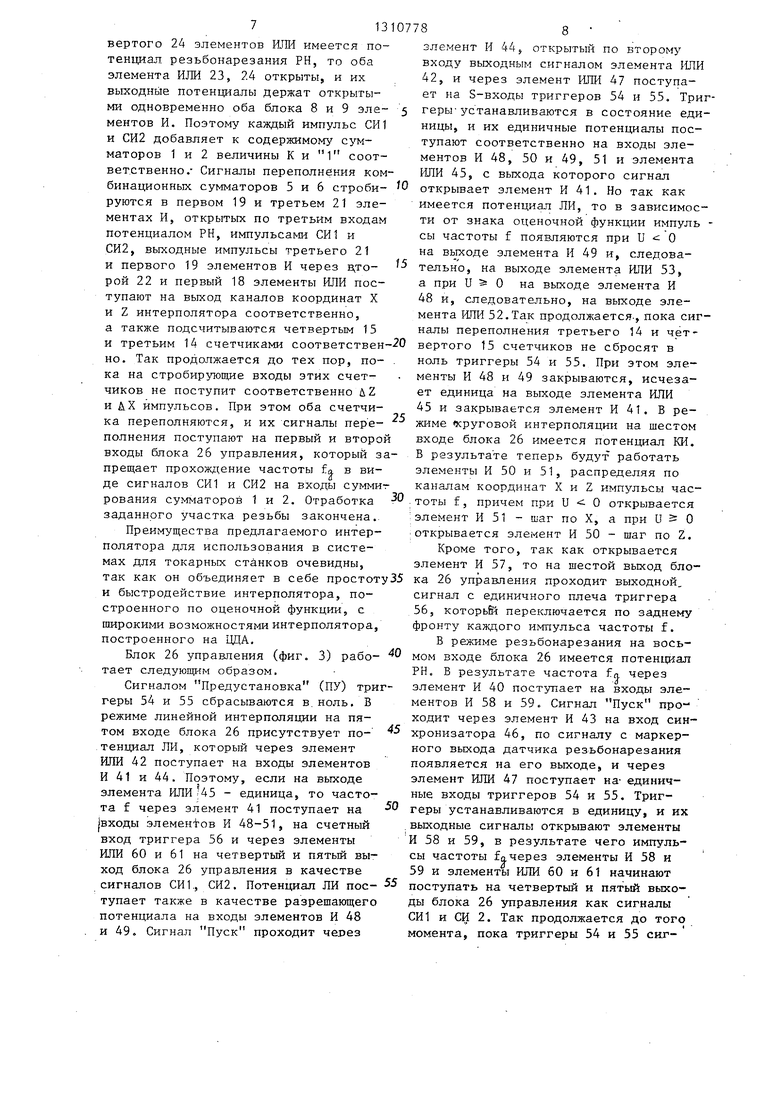
вертого 24 элементов ИЛИ имеется потенциал резьбонарезания РН, то оба элемента ИЛИ 23, 24 открыты, и их выходные потенциалы держат открытыми одновременно оба блока 8 и 9 эле- ментов И. Поэтому каждый импульс СИ1 и СИ2 добавляет к содержимому сумматоров 1 и 2 величины К и 1 соответственно/ Сигналы переполнения комбинационных сумматоров 5 и 6 строби- руются в первом 19 и третьем 21 элементах И, открытых по третьим входам потенциалом РН, импульсами СИ1 и СИ2, выходные импульсы третьего 21 и первого 19 элементов И через дто- рой 22 и первый 18 элементы ИЛИ поступают на выход каналов координат X и Z интерполятора соответственно, а также подсчитываются четвертым 15 и третьим 14 счетчиками соответствен но. Так продолжается до тех пор, по- ка на стробирующие входы этих счетчиков не поступит соответственно Д2 и &Х импульсов. При этом оба счетчика переполняются, и их сигналы переполнения поступают на первый и второ входы блока 26 управления, который зпрещает прохождение частоты fa в виде сигналов СИ1 и СИ2 на входы суммирования сумматоров 1 и 2. Отработка заданного участка резьбы закончена..
Преимущества предлагаемого интерполятора для использования в системах для токарных станков очевидны, так как он объединяет в себе простот и быстродействие интерполятора, построенного по оценочной функции, с широкими возможностями интерполятора, построенного на ЦЦА,
Блок 26 управления (фиг. 3) рабо- тает следующим образом.
Сигналом Предустановка (ПУ) тригеры 54 и 55 сбрасывшотся в.ноль, В режиме линейной интерполяции на пятом входе блока 26 присутствует по- тенциал ЛИ, который через элемент ИЛИ 42 поступает на входы элементов И 41 и 44. Поэтому, если на выходе элемента ИЛИ ;45 - единица, то частота f через элемент 41 поступает на |входы элeмeнtoв И 48-51, на счетный вход триггера 56 и через элементы ИЛИ 60 и 61 на четвертый и пятьй выход блока 26 управления в качестве сигналов СИ1., СИ2. Потенциал ЛИ пес- тупает также в качестве разрешающего потенциала на входы элементов И 48 и 49. Сигнал Пуск проходит через
элемент И 44, открытый по второму входу выходным сигналом элемента 1ШИ 42, и через элемент ИЛИ 47 поступает на S-входы триггеров 54 и 55. Тригеры- устанавливаются в состояние единицы, и их единичные потенциалы поступают соответственно на входы элементов И 48, 50 и 49, 51 и элемента ИЛИ 45, с выхода которого сигнал открывает элемент И 41. Но так как имеется потенциал ЛИ, то в зависимости от знака оценочной функции импуль сы частоты f появляются при U : О на выходе элемента И 49 и, следовательно, на выходе элемента РШИ 53, а при и Э: О на выходе элемента И 48 и, следовательно, на вьгкоде элемента ИЛИ 52.Так продолжается., пока синалы переполнения третьего 14 и четвертого 15 счетчиков не сбросят в ноль триггеры 54 и 55. При этом элементы И 48 и 49 закрываются, исчезает единица на выходе злемента ИЛИ 45 и закрывается элемент И 41. В режиме «круговой интерполяции на шестом входе блока 26 имеется потенциал КИ. В результате теперь будут работать элементы И 50 и 51, распределяя по каналам координат X и Z импульсы частоты f, причем при и О открывается элемент И 51 - шаг по X, а при U s Q открывается элемент И 50 - шаг по Z.
Кроме того, так как открывается элемент И 57, то на шестой выход блока 26 управления проходит выходной, сигнал с единичного плеча триггера 56, которьй переключается по заднему фронту каждого импульса частоты f.
В режиме резьбонарезания на восьмом входе блока 26 имеется потенциал РН. В результате частота fa через элемент И 40 постзшает на входы элементов И 58 и 59. Сигнал Пуск про ходит через элемент И 43 на вход синхронизатора 46, по сигналу с маркерного выхода датчика резьбонарезания появляется на его выходе, и через элемент 1ШИ 47 поступает на- единичные входы триггеров 54 и 55. Триггеры устанавливаются в единицу, и их выходные сигналы открывают элементы И 58 и 59, в результате чего импульсы частоты faчерез элементы И 58 и 59 и элементы ИЛИ 60 и 61 начинают поступать на четвертый и пятый выходы блока 26 управления как сигналы СИ1 и СИ 2. Так продолжается до того момента, пока триггеры 54 и 55 сигналами переполнения третьего 14 и четвертого 15 счетчиков на сбросятся в ноль и закроются элементы И 58 и 59. Таким образом, введение в интерполятор дополнительных первого и второго накапливающих сумматоров, первого 19, второго 20, третьего 21 элементов И, первого 18, второго 22, третьего 23, четвертого-24, пятого 25 элементов ИЛИ, управляемого дели- теля 27, датчика 28 резьбонарезания, третьего 14 и четвертого 15 счетчиков, а также первого 16 и второго 17 регистров промежуточной памяти расширяет функциональные возможности цифрового интерполятора, работающего по оценочной функции за счет обеспечения возможности нарезания цилиндрических и конических резьб.
Формула изобретения
25
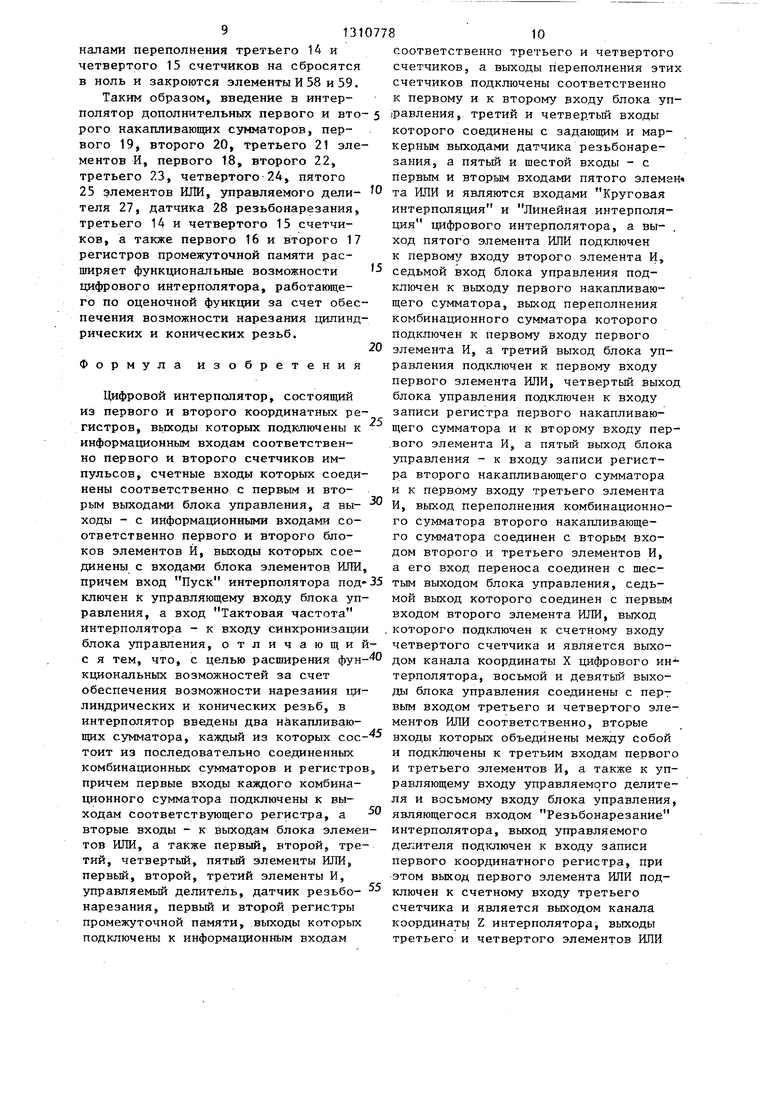
Цифровой интерполятор, состоящий из первого и второго координатных регистров, выходы которых подключены к информационным входам соответственно первого и второго счетчиков импульсов, счетные входы которых соединены соответственно с первым и вторым выходами блока управления, а вы- ходы - с информационными входами соответственно первого и второго блоков элементов И, выходы которых соединены с входами блока элементов. ИЛИ, причем вход Пуск интерполятора ключен к управляющему входу блока управления, а вход Тактовая частота интерполятора - к входу синхронизации блока управления, отличающий- с я тем, что, с целью расширения фун- кциональных возможностей за счет обеспечения возможности нарезания цилиндрических и конических резьб, в интерполятор введены два нйкапливаю- щих сумматора, казедый из которых сос- тоит из последовательно соединенных комбинационных сумматоров и регистров, причем первые входы каждого комбинационного сумматора подключены к выходам соответствующего регистра, а вторые входы - к выходам блока элементов ИЛИ, а также первый, второй, третий, четвертый, пятый элементы ИЛИ, первый, второй, третий элементы И, управляемый делитель, датчик резьбе нарезания, первый и второй регистры промежуточной памяти, выходы которых подключены к информационным входам
50
, 55
5 0 -5 20
25
35 - ,
50
55
соответственно третьего и четвертого счетчиков, а выходы переполнения этих счетчиков подключены соответственно к первому и к второму входу блока уп- (равления, третий и четвертьй входы которого соединены с задающим и маркерным выходами датчика резьбонарезания, а пятый и шестой входы - с первым и BTops iM входами пятого элеменч та ИЛИ и являются входами Круговая интерполяция и Линейная интерполяция цифрового интерполятора, а вы- . ход пятого элемента ИЛИ подключен к первом входу второго элемента И, седьмой вход блока управления подключен к выходу первого накапливающего сумматора, выход переполнения комбинационного сумматора которого подключен к первому входу первого элемента И, а третий выход блока управления подключен к первому входу первого элемента ИЛИ, четвертый выход блока управления подключен к входу записи регистра первого накапливающего сумматора и к второму входу пер- .вого элемента И, а пятый выход блока управления - к входу записи регистра второго накапливающего сумматора и к первому входу третьего элемента И, выход переполнетдая комбинационного сумматора второго накапливающего сумматора соединен с вторым входом второго и третьего элементов И, а вход переноса соединен с шестым выходом блока управления, седьмой выход которого соединен с первым входом второго элемента ИЛИ, выход . которого подключен к счетному входу четвертого счетчика и является выходом канала координаты X цифрового ин- терполятора, восьмой и девятый выходы блока упра:вления соединены с перт вым входом третьего и четвертого элементов ИЛИ соответственно, вторые входы которых объединены между собой и подключены к третьим входам первого и третьего элементов И, а также к управляющему входу управляемого делителя и восьмому входу блока управления, являющегося входом Резьбонарезание интерполятора, выход управляемого дехлителя подключен к входу записи первого координатного регистра, при этом выход первого элемента ИЛИ подключен к счетному входу третьего счетчика и является выходом канала координаты Z интерполятора, выходы третьего и четвертого элементов ИЛИ
II 13
подключены к управляющим входам соответственно второго и первого блоков элементов И, а выход первого элемента И подключен к второму входу первого элемента ИЛИ, выход второго элемента И подключен к входу переноса комбинационного сумматора второго накапливающего сумматора, выход третьего элемента И - к второму входу второго элемента ИЛИ, управляющие входы первого, второго, третьего и
1077812
четвертого счетчиков объединены между собой и подключены к установочному входу блока управления, являющемуся входом Установка интерполя- J тора, а входы записи первого, второго регистров промежуточной памяти, вход записи второго координатного регистра и стробирующий вход управляемого делителя объединены между Ш собой и подключены к входу Запись цифрового интерполятора.
A()(fiJffl
A 6{XH,2ff )
фа.ЗСоставитель А.Аникин Редактор Е.Копча Техред Н.Глущенко
Заказ 2350 Тираж 863 . . Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, M-35j Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, А
Корректор М.Демчик
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Устройство для программного управления | 1986 |
|
SU1376065A1 |
| Устройство для программного управления | 1984 |
|
SU1193643A1 |
| Цифровой интерполятор | 1981 |
|
SU1003022A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Устройство для задания программы | 1986 |
|
SU1348773A1 |
| Система для программного управления | 1985 |
|
SU1325410A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Устройство для задания программы обработки в полярных координатах | 1987 |
|
SU1409974A1 |
| Линейный интерполятор для систем интерактивной графики | 1988 |
|
SU1608691A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах числового программного управления токарными станками. Целью изобретения яв ляется расширение функциональных возможностей интерполятора за счет обеспечения возможности нарезания цилиндрических и конических резьб. Цифровой интерполятор состоит из первого и второго накапливающих сумматоров, блока элементов ИЛИ, первого и второго блоков элементов И, первого, второго, третьего, четвертого счетчиков, первого и второго координатных регистров, первого и второго регистров промежуточной памяти, трех элементов И, пяти элементов ИЛИ, блока управления, управляемого делителя и датчика резьбонарезания. Преимуществом цифрового интерполятора является то, что в режимах линейной и круговой интерполяции частота на выходах его координат равна частоте на входе, т.е. быстродействие максимально, а режим нарезания цилиндрических и конических резьб обеспечивается практически без дополнительных затрат в оборудовании цифрового интерполятора, работающего по оценочной функции. 3 ил.
| Линейно-круговой интерполятор | 1975 |
|
SU555381A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Цифровой интерполятор | 1981 |
|
SU1003022A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
