ГС
05
сд
00
го
Изобретение относится к автоматизации технологических процессов, может быть использовано в промышленности строительных материалов, а также в цветной металлургии и энергетике, и является усовершенствованием технического решения по основному авт. св. № 962872.
Цель изобретения - повышение надежности устройства и стабильности работы механизмов загрузки путем стабилизации уровня материала в бункерах.
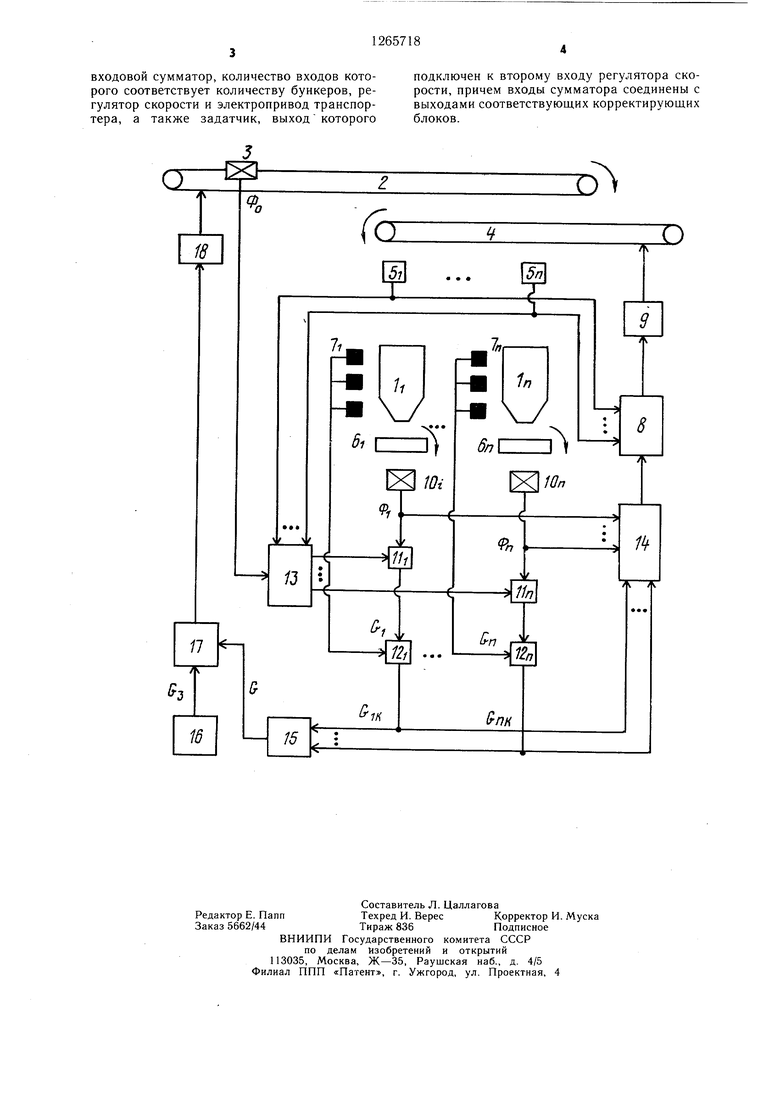
На чертеже приведена схема устройства.
Устройство содержит п бункеров Ь-1„, установленные над бункерами 1 транспортер 2 с весоизмерителем 3 поступающего материала и загрузочный блок 4 с датчиками 5|-5,г его положения, размещенные под бункерами 1 питатели 6i-6„, позиционные датчики 7|-7„ уровня материала в бункерах 1, блок 8 управления с исполнительным механизмом 9 загрузочного блока 4, весоизмерители lOi - 10п расходуемого из бункеров I материала, интеграторы ili - „, корректирующие блоки 2 --12„, коммутатор 13, логический блок 14, сумматор 15, задатчик 16, регулятор 17 скорости, электропривод 18 транспортера.
Весоизмерители 3 и 10 предназначены для непрерывного измерения соответственно расхода Фо материала,поступающего на загрузку по транспортеру 2, и расходов Ф:-Ф„ материала, выдаваемого бункерами 1| - „.
Интеграторы lli служат соответственно для вычисления запаса материала G|...Gn в бункерах Ь-Ь, путем интегрирования разности сигналов Фо и Ф1...ФЛ весоизмерителей 3 и lOi - 10п, а корректирующие блоки 12 для коррекции вычисленных интеграторами 11 величин Gi...Gn по сигналам датчиков 7 уровня м,атериала в бункерах 1.
Датчики 5 положения выполняют функцию идентификации положения загрузочного блока 4 относительно бункеров 1 и обеспечивают с помощью блока 8 управления остановку загрузочного блока 4 у заданного логическим блоком 14 бункера 1, а с помощью коммутатора 13 - переключение сигнала Фо весоизмерителя 3 на интегратор 11 загружаемого бункера 1.
Логический блок 14 предназначен для установки с помощью блока 8 управления загрузочного блока 4 на бункер , с наименьшим текущим значением запаса материала G,K по сигналам GiK...Gnx от корректирующих блоков 12, а также определения бункеров 1/, из которых материал не расходуется, по сигналам расхода Ф, О от весоизмерителей 10.
Сумматор 15 служит для определения суммарного запаса материала
G ...+G,,+ ...+G«« (1)
в бункерах 1 по сигналам корректирующих блоков 12.
- Регулирующий привод 18 транспортера 2 предназначен для плавно-непрерывного изменения скорости подачи материала транспортером 2 по сигналу регулятора 17. Он может быть выполнен по любой системе регулирования, известной из техники электропривода, например асинхронно-вентильный каскад (АВК), тиристорный преобразователь - двигатель постоянного тока (ТП-Д).
Устройство работает следующим образом.
Логический блок 14 поддерживает одинаковый уровень материала в бункерах 1 путем сравнения величин запаса ....Gn материала в них и выбора под загрузку бункера 1; с наименьшим значением запаса G.K. Одновременно блок 14 анализирует сигналы
Ф1...ФЛ и обходит бункеры 1/, из которых материал не расходуется (по значению ). При рассогласовании расхода Фо поступающего материала и суммарного расхода
0Ф ф| +...Ф +...+ Ф„ (2)
материала из бункеров 1 (которое всегда имеет место в реальных условиях из-за наличия различных возмущающих воздействий) вступает в работу внешний контур регули5 рования, содержащий сумматор 15, задатчик 16, регулятор 17 и регулируемый привод 18. При нормальном ходе технологического процесса величина G суммарного запаса материала в бункерах 1 на выходе сумматора 15 равна величине Gs, задаваемой
0 задатчиком 16. Если же, например, суммарный расход Ф уменьшается, средний уровень материала в бункерах 1 начинает возрастать. При этом сигнал G су.мматора 15 становится больше сигнала задатчика 16 и регулятор 17 воздействует на привод 18 транспортера 2 в
5 сторону уменьшения скорости подачи материала. В результате плавно уменьшается расход Фо поступающего материала и, как следствие, уменьшается величина G запаса материала в бункерах. Рассогласование на регуляторе 17 исчезает и технологическая линия работает в новом установившемся режиме с измененной скоростью транспортера 2. Таким образом, расход Фо,поступающего в бункеры материала следит за суммарным расходом Ф выдаваемого бункерами 1 ма5 териала. В результате, поскольку интеграторы 11 обеспечивают
G,(Фo-Ф,)dt, (3) и исходя из выражений (1) и (2) следует
G 5(o-Ф)dt, (4)
0 устройство стабилизирует уровень материала в бункерах 1.
Формула изобретения
Устройство для управления загрузкой сы5 пучих материалов в бункеры по авт. св. № 962872, отличающееся тем, что, с целью повышения надежности устройства, оно содержит последовательно соединенные многовходовой сумматор, количество входов которого соответствует количеству бункеров, регулятор скорости и электропривод транспортера, а также задатчик, выход которого
подключен к второму входу регулятора скорости, причем входы сумматора соединены с выходами соответствующих корректирующих блоков.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления загрузкой сыпучих материалов в бункеры | 1980 |
|
SU962872A1 |
| Дозатор сыпучих материалов | 1983 |
|
SU1111034A1 |
| Весовой дозатор непрерывного действия | 1984 |
|
SU1229584A1 |
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1980 |
|
SU932265A1 |
| Весовой дозатор непрерывного действия | 1975 |
|
SU670818A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТЕХНИЧЕСКИ ОПТИМАЛЬНЫМ УГЛОМ НАКЛОНА НЕПОДВИЖНОЙ НАПРАВЛЯЮЩЕЙ ПОВЕРХНОСТИ ДВИЖЕНИЯ ВЗВЕШИВАЕМОЙ И ДОЗИРУЕМОЙ СЫПУЧЕЙ СМЕСИ САМОТЕКОМ ЗА СЧЕТ СИЛЫ ЗЕМНОГО ТЯГОТЕНИЯ ПРИ ПРИГОТОВЛЕНИИ И РАЗДАЧЕ КОРМОВ И КОРМОВЫХ СМЕСЕЙ В ЖИВОТНОВОДСТВЕ И ПТИЦЕВОДСТВЕ | 2014 |
|
RU2597437C2 |
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1987 |
|
SU1516792A1 |
| Весовой дозатор непрерывного действия | 1982 |
|
SU1059443A1 |
| Дозатор непрерывного действия | 1987 |
|
SU1506286A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРОЦЕССА СУШКИ СЫПУЧИХ МАТЕРИАЛОВ | 1972 |
|
SU334462A1 |
Изобретение относится к автоматизации технологических процессов. Цель изобретения - повышение надежности устройства. Устройство содержит бункеры с питателями и позиционными датчиками уровня, транспортер с приводом и весоизмерителем поступающего материала, загрузочный блок с исполнительным механизмом и датчиками положения, весоизмерители расходуемого из бункеров материала. Управляющая часть устройства включает коммутатор, логический блок, блок управления и интеграторы с корректирующими блоками по числу бункеров. Новым в устройстве является введение регулятора скорости, электропривода транспортера и многовходового сумматора. Входы сумматора подключены к выходам корректирующих блоков, а выход соединен с входом регулятора. Другой вход регулятора подключен к задатчику, а выход соединен с приводом транспортера, который выполнен с возможностью плавного регулирования скорости. Сумматор вычисляет текущее значение запаса материала в бункерах. При возрастании (снижении) его величины по сравне€ нию с заданной задатчиком уменьшается (увеличивается) скорость транспортера так, (Л чтобы уменьшить, (увеличить) запас до заданного. Устройство может использоваться в производстве строительных материалов, цветной металлургии, энергетике. 1 ил.
| Устройство для управления загрузкой сыпучих материалов в бункеры | 1980 |
|
SU962872A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
