Изобретение относится к автомати зации процессов в цветной металлургии и предназначено для управления распределением общего потока поступающего материала между параллельно включенными бункерами.
Известно устройство для sшpaвлeния загрузкой бункеров, включающее логические устройства, и в качестве распределительного агрегата, использующее загрузочную тележку, снабженную механизмами передвижения и датчиками положения 1. :
Наиболее близким к предлагаемому является устройство для управления загрузкой шихты в бункеры агломерационных машин, которое содержит установленный над бункерами транспортер, связанный с механизмами сброса, блок управления механизмами сброса, механизм разрушения сводов, позиционные датчики верхних и нижних уровней 21.
Известные устройства недостаточно эффективны в распространенном в металлургическом производстве случае, когда общий поток поступающего материала расйределяется между параллельно включенными бункерами, каждый из питает свой агрегат-потребитель (например,агломашину), причем в каждый момент, времени весь поступающий поток направляется в один бункер, а контроль уровня осуществляется с помощью позиционных датчиков.
в прсячьшленных условиях невозможно достичь идеального согласования между расходом поступающего материа10ла, с одной стороны, и суммой расходов материала, выдаваемых из кажч дого бункера, с другой. Поэтому управление загрузкой бункеров должно вестись таким образом, чтобы запа15сы материала в каждом бункере как можно меньше отличались друг от друга. В этом случае - при одном и том же рассогласовании - обеспечивается наибольший запас времени до опо20рожнения или переполнения хотя бы одного из бункеров.
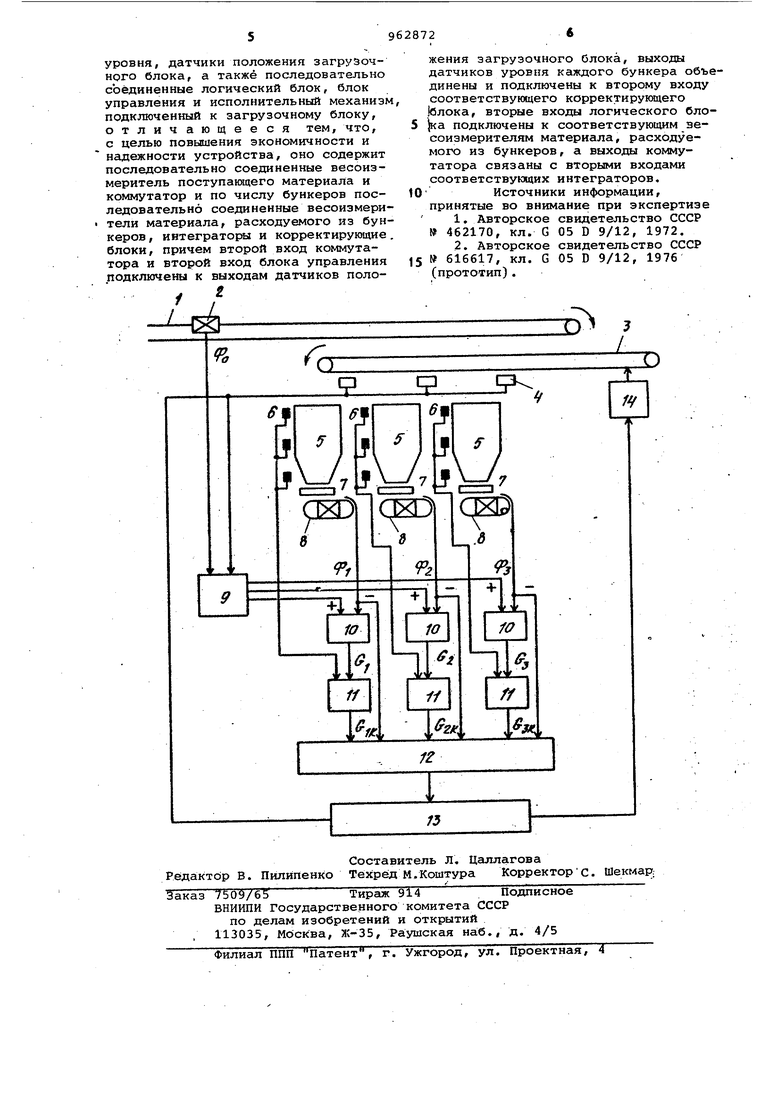
В то же время при использовании известных устройств, осуществляющих выбор очередного бункера под загруз25ку только по информации от позиционных датчиков уровня, уровни материала в разных бункерах могут существенно отличаться друг от друга. Так, при трехпозиционнрм контроле извест30ные устройства с одинаковой-вероятностью выберут под загрузку бункер с уровнем чуть выше нижнего и бункер с уровнем чуть ниже среднего, в то время, как запасы материала в них отличаются на 20-25% емкости бункера Это может привести к преждевременному (по сравнению с равномерной загрузкой) опорожнению одного из бункеров и аварийной остановке агрегата который питает этот бункер. Возможно также преждевременное переполнение одного из бункеров, вызывающее аварийную остановку всей системы подачи материала. Цель изобретения - лучшее использование емкости бункеров за счет поддержания в них одинаковых запасов материала, что .позволяет повысить экономичность и надежность устройства. Указанная цель достигается тем, что устройство содержит весоизмеритель поступающего материала, коммутатор, весоизмерители материала, расходуемого из каждого бункера, интеграторы и корректирующие блоки, количество которых равно количеству бункеров, причем выходы питателей соединены с входами весоизмерителей расходуемого материала, весоизмеритель поступающего материала связан с подающим транспортером, выходы весоизмёрителя поступающего материала и датчиков положения загрузочного блока соединены с входами коммутатора, выходы которого, а также выходы весоизмерителей расходуемого материа ла соединены с входами интеграторов выходы интеграторов и выходы датчиков уровня подключены к входам корректирующих блоков, выходы которых подклю чены к входам логического блока, с другими входами логического блока соединены выходы весоизмерителей расходуемого материала, к входам блока управления подключены выходы логического блока и датчиков положения загрузочного блока, а выход, блока управления связан с входом исполнительного механизма. На чертеже дана блок-схема устрой ства. Устройство для автоматического уп равления загрузкой сьш5П1их материалов в бункеры содержит подсшлций транспортер 1, весоизмеритель 2 подступающего материала, загрузочный бло 3. датчики 4 положения загрузочного блока, бункера 5, позиционные датчики б уровня, питатели 7, весоизмерители 8 расходуетлого материала, коммутатор 9, интеграторы 10, корректирующие блоки 11, логический блок 12 блок 13 управления, исполнительный механизм 14. Устройство работает следуюцим об разом. Расход материала, поступающего по транспортеру 1, измеряется весоизмерителем 2. Сигнал Фо, пропорциональный этому расходу, поступает на вход коммутатора 9. Номер бункера 5, в который в данный момент поступает материал, определяется положением загрузочного блока 3, которое контролируют датчики 4, подающие сигналы на вход коммутатора 9, который подключает сигнал,Фд на плюсовый вход интегратора 10 загружаемого бункера. Расходы материала, подаваемого из каждого бункера 5 питателям 7, измеряют весоизмерители 8. Сигналы Ф-) . пропорциональные зтим расходам, поступают на минусовые входы интеграторов 10. Таким образом, интегратор загружаемого i-ro бункера интегрирует разность а интеграторы всех остальных бункеров только расходуемый поток Ф-. Сигналы G, 2 GO на выходе интегра- , торов 10, пропорциональные текущему значению запасов материала в бункерах, поступают на входы корректирующих блоков 11, где корректируются по показаниям позиционных датчиков 6 уровня. При наличии ошибки скорректированное значение G устанавливается в соответствии с показаниями датчиков уровня (например, если датчик среднего уровня в бункере 1 сигнализирует наличие материала, а сигнал G-, соответствует более низкому уровню, то величина устанавливается соответствующей среднему уровню G 1 Сигналы с выхода корректирующих блоков G-, , 1 ,... ,G ПК. через заданный интервал времени сравниваются в логическом 12, который выбирает под загрузку бункер с наименьшим (ц . При этом логический блок анализирует также сигналы Ф, Ф,..., Ф и ,исключает из рассмотрения при выбогре бункера, из которых не расходуется материал (у которых ). Сигналы о номере выбранного бункера от логического блока 3 от датчиков 4 поступают в блок 13 управления механизмами, который передает необходи-, мые команды исполнительным механизмам загрузочного блока 14. Использование предлагаемого устройства позволяет более эффективно использовать емкости бункеров, сократить время простоев трактов подачи материалов в бункера и агрегатов, перерабатыванядих эти материалы. Формула изобретения Устройство для управления загрузкой сыпучих материалов в бункеры, содержащее установленный над бункерами транспортер и заг узочным блоком,| бункеры с питателями и датчиками
уровня, датчики положения загрузочного блока, а также последовательно соединенные логический блок, блок управления и исполнительный механизм подключенный к загрузочному блоку, отличающееся тем, что, с целью повышения экономичности и надежности устройства, оно содержит последовательно соединенные весоизмеритель поступающего материала и коммутатор и по числу бункеров последовательно соединенные весоизмерители материала, расходуемого из бункеров , интегратоЕял и корректирующие блоки, причем второй вход коммутатора и второй вход блока управления подключены к выходам датчиков поло г
жения загрузочного блока, выходы датчиков уровня каждого бункера объединены и подключены к второму входу соответствующего корректирующего блока, вторые входы логического блока подключены к соответствующим весоизмерителям материала, расходуемого из бункеров, а выходы коммутатора связаны с вторыми входами соответствующих интеграторов.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 462170, кл. G 05 D 9/12, 1972.
2.Авторское свидетельство СССР 616617, кл. G 05 D 9/12, 1976
(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления загрузкой сыпучих материалов в бункеры | 1984 |
|
SU1265718A2 |
| Устройство согласования производительностей шихтового и спекательного отделений | 1985 |
|
SU1273398A1 |
| Система контроля запаса материала в многосекционном бункере | 1991 |
|
SU1796571A1 |
| Дозатор сыпучих материалов | 1983 |
|
SU1111034A1 |
| Устройство для дозирования материалаВ АппАРАТы | 1979 |
|
SU849150A1 |
| Весовой дозатор непрерывного действия | 1984 |
|
SU1234727A1 |
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1980 |
|
SU932265A1 |
| Устройство для управления загрузкой материалов в расходные бункеры | 1977 |
|
SU691368A1 |
| Автоматический гранулометр сыпучих материалов | 1984 |
|
SU1241106A1 |
| Устройство для автоматического контроля запасов сыпучих материалов в бункере | 1988 |
|
SU1534328A1 |
