В ОСНОВНОМ авт. св. № 121253 описан датчик ускорений с вращающимся цилиндром демпфера н инерционной массой в виде порщня демпфера. Для получения сигнала скорости при помощи такого датчика необходимо сигнал датчика ускорений проинтегрировать во времени.
Отличие описываемого датчика заключается з том, что датчик линейных ускорений совмещен с пневматическим Интегратором и, таким образом, обеспечивает возможность одновременного получения сигналов, пропорциональных ускорению и скорости. Это достигается тем, что датчик имеет воздушный демпфер, поршень которого служ)1т инерционной массой, а направляющий элемент приводится во вращение. При этом и-нерционная масса выполнена з форме двух поршней, связанных один с другим пластинчатой пружиной и взаимодействующих со щеткамиограничителями, опирающимися на направляющие валики, также приводимые во вращение.
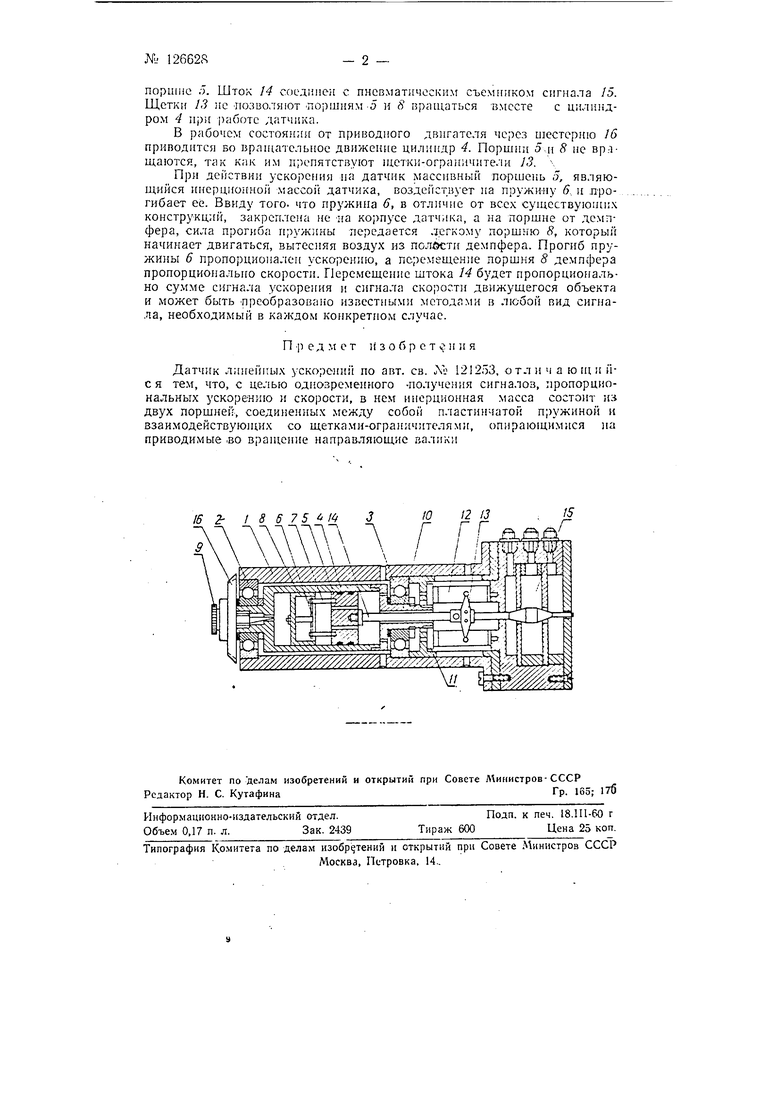
Конструкция датчика -показана на чертеже.
В корпусе 1 яа подшипниках 2 и 3 установлен вращающийся цилиндр 4, внутри которого Перемещается массивный поршень 5 и связанный с ним через пласти-нчатую пружину 6, закрепленную на стойках 7, легкий порщень 8. Цилиндр 4 имеет отверстие для истечения воздуха, которое регулируется винтом 9. Поршень 5 имеет продольные отверстия для свободного прохода воздуха в полость между поршнями 5 и 8. Эти отверстия могут быть также использованы для создания дополнительного демпфирования между поршнями 5 и 8. Цилиндр 4 на своем конце имеет втулку 10 с шестерней, которая сцеплена через шестерню 11 с двумя цилиндрическими валиками 12, по которым скользят щетки-ограничители ;5, лЬнтированные на штоке 14, закрепленном в
поршне о. Шток 14 соединен с пневматическим съемником сигнала /5 Щетки 13 ПОЗВОЛЯЮТ -поршиям-5 и S вращаться вместе с цилиндром 4 ири работе датчика.
В рабочем состоянии от приводного двигателя через шестерню 16 приводится Бо вращательное движение цилиндр 4. Поршни 5.и 8 не вр-iщаются, так как им препятствуют плетки-ограничители 13.
При действии ускорения па датчик массивный поршень 3, являющийся инерционной массой датчика, воздействует на пружи-ну 6 и лрогибает ее. Ввиду того, что пружина 6, в отличие от всехсуществующих конструкций, закреплена не -ta корпусе датчика, а на поршне от демпфера, сила прогиба пружины передается легкому поршню 8, который начинает двигаться, вытесняя воздух из поласти демпфера. Прогиб пружины 6 пропорционален ускорению, а перемещение поршня 8 демпфера пропорционально скорости. Перемещение штока 14 будет пропорционально сумме сигнала ускорения и сигнала скорог.ти движущегося объекта и может быть -преобразовано известными методами в любой вид сигнала, необходимый в каждом конкретном случае.
Предмет Изобретения
Датчик линейных ycKopeiniii по авт. св. Л1 121253, о тли ч а ющи йс я тем, что, с целью однозременного -получения сигналов, пропорциональных ускорению и скорости, в нем инерционная масса состоит ин двух поршней, соединенных между собой пластинчатой пружиной и взаимодействующих со щетками-огра1 ичителям г, опирающимися на приводимые .во врап1,ение направляющие валики
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик линейной скорости | 1959 |
|
SU126627A1 |
| Датчик линейных ускорений | 1959 |
|
SU121253A1 |
| Электродинамический стенд для физического моделирования систем автоматического управления, имеющих датчики линейных ускорений | 1961 |
|
SU150304A1 |
| Дорожный профилограф | 1959 |
|
SU123721A2 |
| Дорожный профилограф | 1958 |
|
SU120014A1 |
| Устройство для регистрации скорости прямолинейного движения наземного объекта | 1959 |
|
SU127483A1 |
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| Устройство для регистрации скорости движения наземного объекта | 1960 |
|
SU135293A1 |
| РЕАКТИВНЫЙ СУДОВОЙ ДВИГАТЕЛЬ | 1998 |
|
RU2140374C1 |
| ПРОТИВОБЛОКИРОВОЧНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2025341C1 |
2- L 8 6
ллллдллл л
, л ,,. ,.
:Щ:%%Ж %% :%$1 ( ЩЖ- (W////////////////////A:f-.
5
12 13
.Г
Г Г
ш
