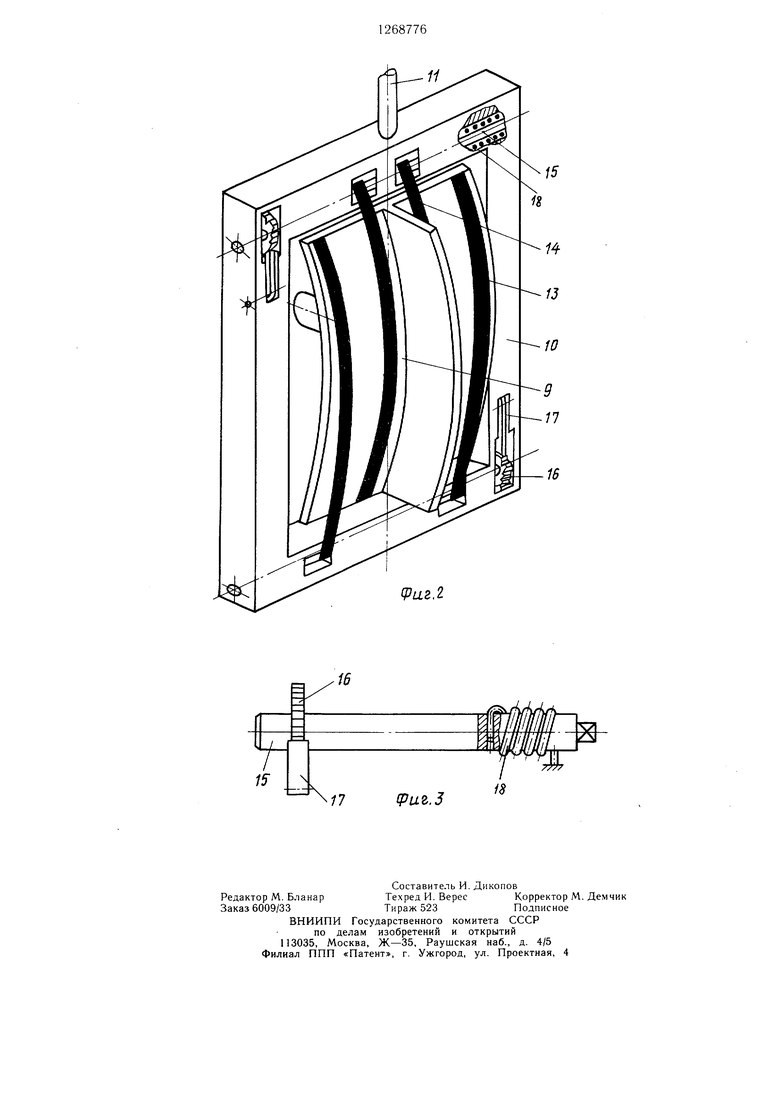
Изобретение относится к машиностроению, а именно к двигателестроению, и может быть использовано при создании конструкции двигателей Стирлинга. Цель изобретения - повышение коэффициента полезного действия привода путем уменьшения механических потерь. На фиг. 1 представлен схематически привод двигателя; на фиг. 2 - сектор с рамкой, натяжным устройством и гибкими тягами, аксонометрия; на фиг. 3 - натяжное устройство. Привод двигателя состоит из вала 1, подижпников 2, радиальных осей 3 и 4, выполненных как продолжение составного наклонного -диска 5, надетого на ступицу (не показана) с подшипниками 6. На концах радиальных осей 3 и 4 надеты подшипники 7 и 8, на которые установлены секторы 9 с рамками 10, соединенными со штоками 11, подключаюш,ими поршни 12 к рамкам 10. Секторы 9 соединены с рамками 10 при помощи крайних 13 и средних 14 гибких тяг. В рамках 10 размецдено натяжное устройство гибких тяг 13 и 14, состоящее из валика 15, храповика 16, собачки 17 с пружиной и осью. Натяжение гибких тяг 13 и 14 (фиг. 2, зачерчены) осуществлено пружиной 18. Секторы 9 на радиальных осях 3 и 4 установлены так, что их средняя линия совпадает с осевой линией щтоков 11 поршней 12 (находятся на траектории качения радиальных осей 3 и 4 независимо от их положения при качении). С целью исключения загромождения показаны лишь два поршня 12(фиг. 1). Рамки 10 с гибкими тягами 13и 14 выполнены и установлены так, что радиальные оси 3 и 4 составного наклонного диска 5, а при этом и секторы 9 находятся в геометрическом центре рамок 10. Для удержания от радиального перемещения составного наклонного диска 5 рамки 10 снабжены выступами 19. Привод двигателя Стирлинга двойного действия работает следующим образом. При давлении газа на поршень 12 сила давления передается штоку 11, рамке 10, валику 15 и через крайние тяги 13 сектору 9. Последний через подшипники 7 и 8 силу давления передает радиальным осям 3 и 4, а через подшипники 6- валу 1. В то же время противоположный (по месту расположения) поршень выполняет вспомогательный процесс - вытесняет газ. Сила давления передается поршню следующим образом: когда верхний конец радиальной оси, например 3, опускается вниз, нижний ее конец поднимается вверх (фаза вытеснения газа), крутящий момент через вал 1, который вращается в подшипниках 2, передается ступице (не показана) и наклонному составному диску 5 через подшипники 6, сила момента передается сектору 9 через подшипники 7 и 8, и крайние тяги 13, валик 15 рамке 10, штоку 11 поршня 12. Работа секторов с рамками и натяжными механизмами гибких тяг происходит следующим образом. В начальном периоде крайние тяги 13 крепятся верхними концами (фиг. 2) к сектору 9, а их нижние концы наматываются на валик 15 натяжного механизма. Средние тяги 14 аналогично натянуты и прикреплены неподвижно нижними концами, а верхние их концы прикреплены и намотаны на валике 15. При движении поршня 12, например, вниз шток И с рамкой 10 движется тоже вниз и тянет за собой крайние связки 13 и сектор 9. В то время, когда гибкие тяги 13 натянуты, гибкие тяги 14 освобождаются, и, если создается люфт, превышающий шаг храповика 16, заведенная пружина 18, надетая на валик 15, поворачивает валик 15 в сторону тяг. Храповик 16 препятствует повороту валика 15 в противоположном направлении и тем самым сматыванию тяг 13 или 14 с валиков 15. Угол колебания рамок 10, а также радиальных осей 3 и 4, связанных с секторами 9, находится в пределах 0-30°, а секторы 9 по отношению рамок 10 лишь катятся вперед-назад по своей средней линии, совпадающей с осями штоков И и пopпJнeй 12. При движении радиальных осей 3 и 4 вверх тяги 13 «набегают на сектор 9, а тяги 14 «сбегают с него, а при движении радиальных осей 3 и 4 вниз тяги 14 «набегают на сектор 9, а тяги 13 «сбегают с него. В частности каждый сектор имеет четыре беговые дорожки для гибких тяг 13 и 14. В качестве гибких тяг могут быть использованы цепи приводные роликовые или приводные втулочные необходимого размера, в зависимости от мощности двигателя, либо пластмассовая или стальная лента. Формула изобретения Привод двигателя Стирлинга двойного действия, содержащий вал, установленный в подшипниках, штоки, соединенные с поршнями и ползунами, и установленный на валу составной наклонный диск со ступицей и радиальными осями, телескопически связанными с ползунами, отличающийся тем, что, с целью повышения КПД привода,он дополнительно снабжен рамками, натяжными устройствами и гибкими тягами, ползуны выполнены в виде секторов с выступами, установлены на радиальных осях, размещены в рамках и связаны с ними через гибкие тяги, прикрепленные одними концами к секторам, а другими - к натяжным устройствам, последние установлены в рамках, которые соединены со штоками, причем геометрические центры рамок размещены на осях радиальных осей составного наклонного диска а средние линии секторов совмещены с осями движения поршней.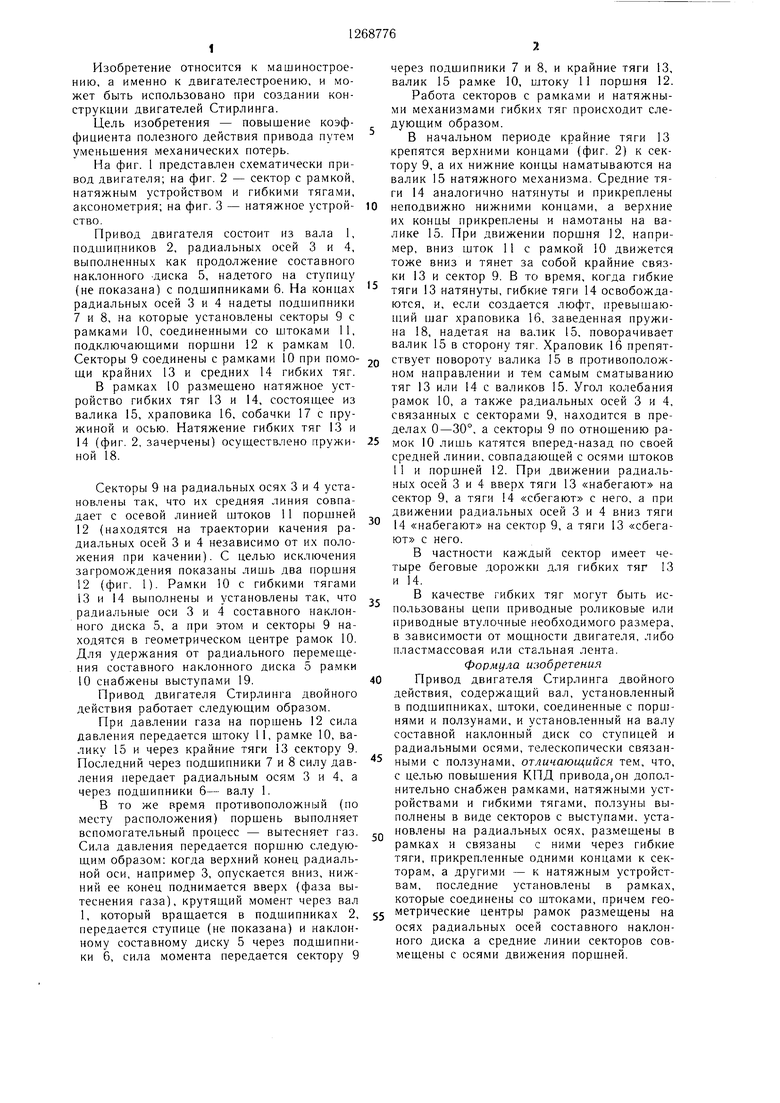
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для перематывания основныхНиТЕй | 1979 |
|
SU848491A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ ХАЛ ИЗ ПРЕДВАРИТЕЛЬНО ЗАКАТАННЫХ ТЕСТОВЫХ ЖГУТОВ | 1963 |
|
SU223714A1 |
| ПРОПУЛЬСИВНЫЙ КОМПЛЕКС ТОРПЕДЫ, СПОСОБ РАБОТЫ И ВАРИАНТЫ ДВИЖИТЕЛЯ | 2020 |
|
RU2757339C1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1938 |
|
SU57816A1 |
| ЛЕНТОШЛИФОВАЛЬНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ ПРОФИЛЕЙ В ЗОНЕ СВАРНЫХ СТЫКОВ | 1966 |
|
SU216466A1 |
| Захват рельсовый антиопрокидыватель с тормозом | 2023 |
|
RU2836927C1 |
| Транспортер для торфа | 1923 |
|
SU1705A1 |
| Поточная линия для конечной отделки текстильных полотен | 1985 |
|
SU1326687A1 |
| ПОЧВОИЗМЕЛЬЧИТЕЛЕПОСАДОЧНЫЙ АГРЕГАТ И.Г.МУХИНА | 1997 |
|
RU2121251C1 |
| ПАКЕТНАЯ ЛОПАТОЧНАЯ МАШИНА | 2001 |
|
RU2189501C1 |
Изобретение относится к двигателестроению и может быть использовано при создании конструкции двигателей Стирлинга. Целью изобретения является повышение КПД привода. Для этого на радиальные ОСИ составного диска 5 двигателя установлены подшипники 7 и 8 качения. На них надеты секторы (С) 9 таким образом, что их средняя линия совпадает с осевой линией штоков 11 поршней 12. С 9 имеют рамки 10 с гибкими тягами (ГТ) 13 и 14 и натяжное устройство. Через него ГТ 13 и 14 одним концом прикреплены к С 9, а другим - к рамкам 10. При работе двигателя перемещение С 9 с рамками 10 и натяжными механизмами ГТ 13 и 14 происходит таким образом, что в то время, когда ГТ 13 натянуты, ГТ 14 освобождаются. Угол колебания рамок 10, а также радиальных осей 3 и 4, связанных с С 9, находится в пределах 0± 30°. С 9 по отношению к рамкам 10 лишь катятся возвратно-поступательно по своей средней линии. При движении радиальных осей 3 и 4 вверх и вниз ГТ 13 и 14 соответственно «набегают и «сбегают с С 9. 3 ил. О) ю О) 00 О5
| Привод для многоцилиндрового двигателя с внешним подводом теплоты и с цилиндрами, расположенными параллельно вокруг общей оси | 1982 |
|
SU1096417A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
