1
Изобретение предназначено для контроля за состоянием объектов и управления объектами, в которых в качестве исполнительных механизмов использованы инерционные устройства, например типа электромагнитных реле, электрогидроклапанов, и может быть применено в горной промышленности для автоматического управления механизированной крепью, струговыми установками, устройствами орошения призабойного пространства лав и др.
Известны системы телемеханики для объектов с инерп.ионными исполнительными механизмами, содержанше датчики положения объектов, входы которых подключены к одним .из выходов распределителя контролируемого пункта, другие выходы которого подключены к инерционным исполнительным механизмам, а входы соединены с одним из выходов узла запуска распределителей и с одним из выходов генератора тактовых импульсов, другой выход которого соединен с одним из входов распределителя дисиетчерского пункта, а вход через ключ синхронизации работы распределителей соединен с первым выходом распределителя диспетчерского пункта, второй выход которого подключен к одному из входов дешифратора, а другой вход - к другому выходу узла заиуска распределителей, один из выходов дешифратора
подключен ко входу блока индикации, а другой - к первому входу шифратора, ключи.
Однако такие устройства сложны и недостаточно помехоустойчивы.
Целью изобретения является устранение этих недостатков.
Поставленная цель достигается благодаря тому, что третий выход распределителя диспетчерского пункта соединен со вторым входом шифратора, третий вход которого соединен с выходом счетчика, а выходы подключены ко входу узла запуска распределителей и ко входу одновибратора, выходы которого подключены соответственно ко входу блока индикации через ключ гашения, ко входу генератора тактовых импульсов через ключ задержки и через ключ питания - к общему проводу инерционных исполнительных механизмов. Выходы датчиков положения объектов через последовательно соединенные переключатели рода сигналов и входной блок соединены с другим входом дешифратора.
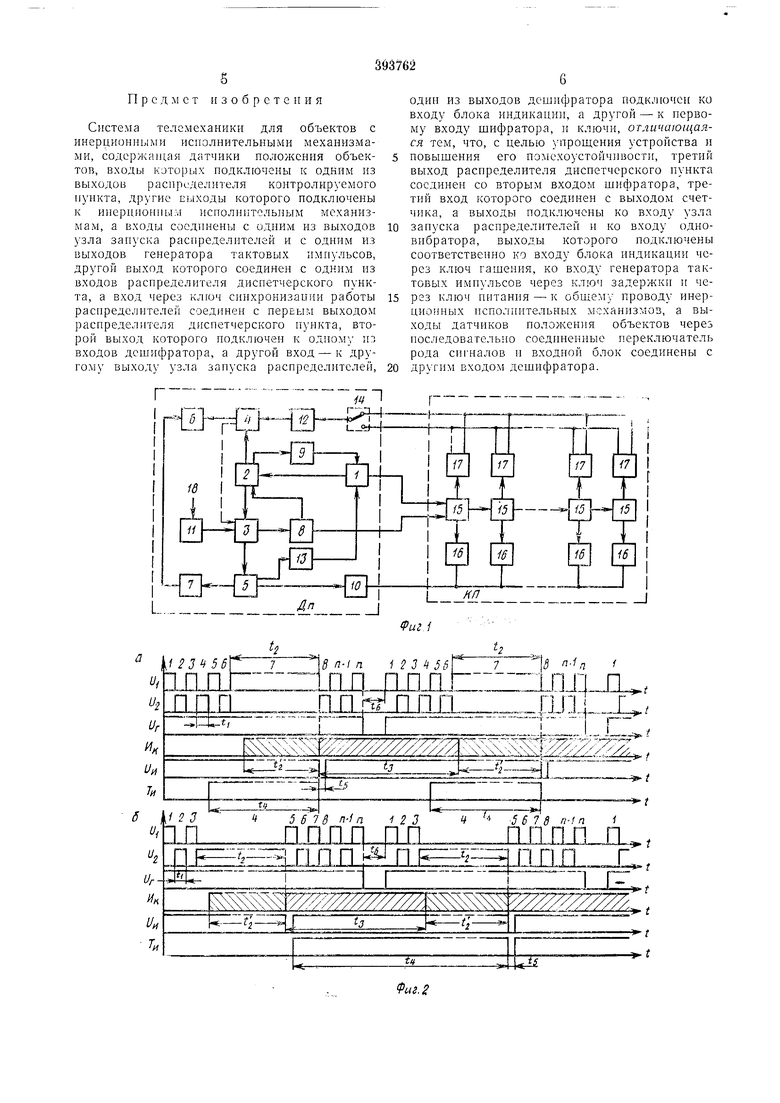
На фиг. 1 приведена блок-схема системы телемеханики для объектов с инерционными исполнительными механизмами.
Система содержит генератор тактовых импульсов 1, распределитель диспетчерского пуикта (ДП) 2, и ифратор телеуправления ., дешифратор 4, одновибратоо .5. блок индикации 6, ключ 7 гашения индикации, узел запуска 8 первых ячеек распределителей, ключ синхронизации работы распределителей 9, ключ питания 10 электрогидроклапанов, счетчик 11 местонахождения рабочего органа струговой установки, выходной блок 12, ключ задержки 13, переключатель рода сигналов 14, распределитель 15 контролируемого пункта (КП), электрогидроклапаны 16 (инерционные исполнительные механизмы), датчики положения объектов 17 и датчик местоположения рабочего органа струга 18.
На фиг. 2 приведены временные диаграммы работы системы, на которых приняты обозначения:
2 - выходное напряжение тактового генератора;
t/r - напряжение питания тактового генератора;
Uii - напряжение питания блока индикации;
UK - состояние электрогидроклапана (заштрихованная часть), соответствуюшее включенному состоянию;
Гц - время свечения отдельного индикатора.
Система работает следующим образом.
При подаче напряжения питания генератор 1 вырабатывает последовательность импульсов выбора. Сигналы выбора поступают синхронно на распределитель 2 ДП и на распределитель /5 КП. При включенных ячейках распределителя 2 шифратор телеуправления 3 выдает сигнал в узел запуска 8, который подготавливает первые ячейки распределителей. По мере поступления тактовых импульсов в распределителях 2 и /5 происходит сдвиг сигнала. Определенному отрезку времени соответствует выбор определепного объекта. Сигнал через датчики 17, характеризующие состояние объекта, и через переключатель 14 рода сигналов поступают во входной блок 12. С выхода последнего сигналы идут в дешифратор 4, в который поступают сигналы с распределителя 2. При совпадении сигналов с одной из ячеек распределптеля и датчика, подключенного к соответствуюп1ей -ячейке распределителя 15 (лавы), де1пифратор 4 выдает сигнал на зажигапие определенной лампы блока индикации 6. Этот сигнал запоминается. Электрогпдроклананы 16 устройства орошения струговой установки, подключенные к ячейкам распределителя 15 обладают электромагнитной и гидромеханической инерционностью как при включении, так и при выключении. Цепи сигнализации безынерционны. Выбор объекта производится импульсом ti, длительность которого меньше времени срабатывания электрогидроклапана. Кроме того, общее время контроля з (длительность серии импульсов контроля состояния всех объектов, кроме включенного) должно быть не больше
времени отпускания отп элсктрогидроклап а-и а
{/з,(«-1),4,„,
где п - число контролируемых объектов.
С датчика 18 местоположения рабочего органа струга сигналы поступают в счетчик //,
а с выхода счетчика - в шнфратор телеуправления 3. В зависимости от местоположения рабочего органа струга шифратор телеуправления 3 выдает команду на срабатывание одновибратора 5, который через ключ
задерживает генератор тактовых имнульсов на определенной ячейке распределителей на время tz, необходимое для срабатывания электрогидроклапана. На это же время сигналом с одновибратора открывается ключ
питания 10, через который протекает ток электрогидрокланана. В конце времени задержки с одновибратора 5 сигнал поступает на ключ гашения 7 блока индикации, который кратковременно (на время fs, меньшее
времени контролирующего сигнала) снимает питание с блока индикации 6. Таким образом выключаются ячейки памяти блока индикации, и все индикаторы гаснут. После этого зажигание отдельных индикаторов производится по командам дешифратора 5 от контролирующих импульсов следующего цикла на время /.( горения отдельного индикатора. Для более равномерного свечения индикаторов ключ 7 может работать в комплексе с
пересчетным устройством и стирать информацию на индикаторах не в каждый цикл, а через несколько циклов в зависимости от яркости и длительности свечения. Это нозволяет снизить до минимума, допускаемого времепем включения электрогидроклапана, время задержки /2 и, следовательно, повысить частоту контроля состояния объектов и частоту коррекции сбоев схемы управления.
Снихронизация работы распределителей
диспетчерского пункта и лавы производится в каждый цикл работы по сигналу с последней ячейки распределителя ДП через ключ 9, кратковременно на время снимающий питание с генератора тактовых имнульсов, а
следовательно и с распределителей. После этого распредслителп запускаются от узла запуска.
На фпг. 2 показаны временные диаграммы работы системы нри включенных электрогидроклапанах 7-8 (фиг. 2, а) и четвертой (фиг. 2, б) ячейки распределителя лавы и замкнутом датчике его пятой ячейки. Индикатор, соответствующий этой ячейке, зажигается при поступлении сигнала через этот замкнутый датчик и светит в теченне времени 4, складывающегося из времени опроса последующих ячеек (до включающей электрогидроклапаи) и времени /2 задержки для включения электрогидроклапана.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гидрофицированной установкой | 1980 |
|
SU1143837A1 |
| Устройство автоматического управления системой пылеподавления струговой установки | 1982 |
|
SU1092281A1 |
| Способ секционного орошения очистногозАбОя пРи СТРугОВОй ВыЕМКЕи уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1976 |
|
SU812941A1 |
| СИСТЕМА ТЕЛЕМЕХАНИКИ ДЛЯ УПРАВЛЕНИЯ ПЕРЕДВИЖКОЙ СЕКЦИИ ШАХТНОЙ ГИДРОКРЕПИ | 1969 |
|
SU245710A1 |
| Устройство для индикации работы транспортно-закладочной установки | 1980 |
|
SU909164A1 |
| Устройство автоматического поддержания прямолинейности базы очистного агрегата | 1981 |
|
SU1010284A1 |
| Устройство для дистанционного управления перемещением секций шахтной гидрокрепи | 1984 |
|
SU1233200A1 |
| УСТРОЙСТВО ДЛЯ ТЕЛЕСИГНАЛИЗАЦИИ О СОСТОЯНИИ РАССРЕДОТОЧЕННЫХ ОБЪЕКТОВ С ОБЩЕЙ ПРОВОДНОЙЛИНИЕЙ СВЯЗИ | 1973 |
|
SU435550A1 |
| Система автоматического управления струговой установкой | 1977 |
|
SU1002602A1 |
| Система телемеханики для управления передвижкой секций шахтной гидрокрепи | 1985 |
|
SU1269171A1 |