:о со со
CD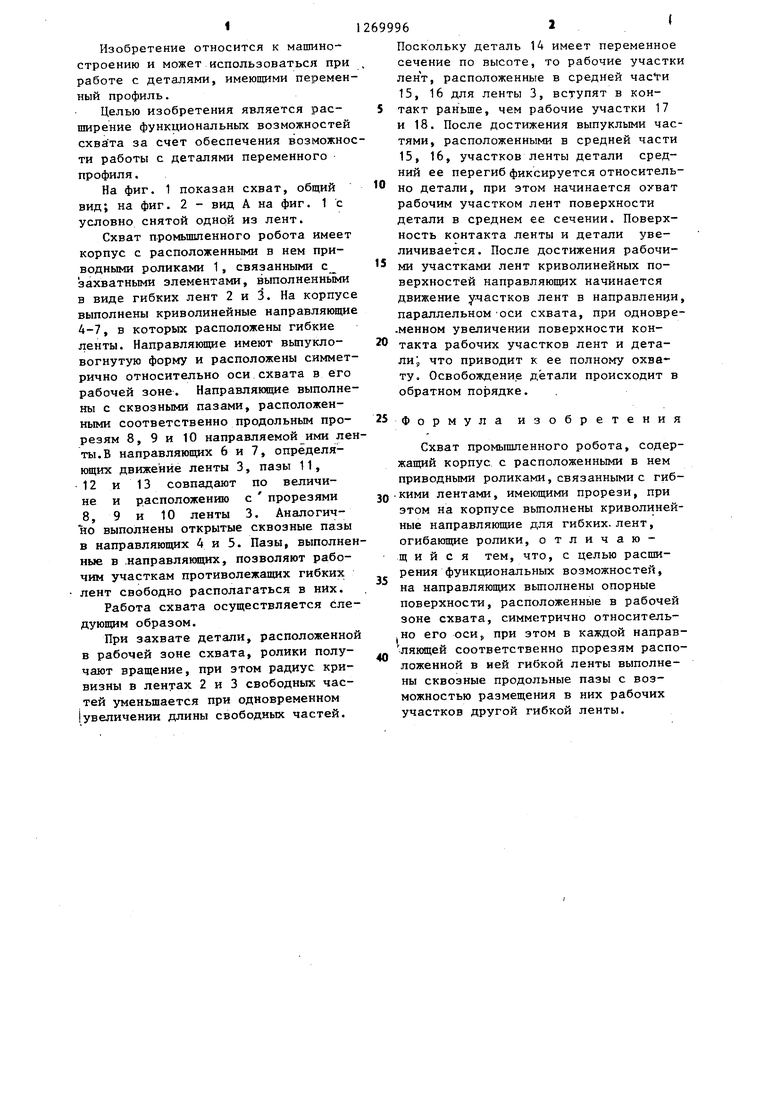
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1984 |
|
SU1184664A1 |
| Исполнительный орган манипулятора | 1986 |
|
SU1323364A1 |
| СПОСОБ УСТАНОВКИ В ШПУР ТРУБЧАТОГО АНКЕРА С КОЛЬЦЕВЫМ ПОПЕРЕЧНЫМ СЕЧЕНИЕМ И АНКЕР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2588049C2 |
| Рука манипулятора | 1985 |
|
SU1291382A1 |
| СПОСОБ СКАЛЫВАНИЯ ЛЬДА И УПЛОТНЕННОГО СНЕГА | 2011 |
|
RU2471919C1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Трубчатый анкер | 2017 |
|
RU2674038C1 |
| Гибкий производственный модуль | 1988 |
|
SU1593915A1 |
| Рука манипулятора | 1985 |
|
SU1263520A1 |
| Рука тензорного манипулятора | 1984 |
|
SU1202851A1 |

Объект может использоваться при работе с деталями переменного профиля и различных физических свойств, чем обеспечивается расширение его функциональных возможностей. Зажимные элементы охвата выполнены в виде закрепленных на роликах гибких лент, имеющих прорези, что позволяет лентам как -бы проходить друг сквозь друга при захвате детали. Наличие криволинейных направляющих позволяет регулировать направление распределения усилия давления лент на захватываемую деталь при изменяющейся длине лент при работе схвата. Наличие на каждой направляющей пазов, соответствующих прорезям ленты, расположенной в данной направляющей, позволяет другой гибкой ленте беспрепятственно изменять длину при. с схвате детали.2 ил. сл
о ai.f 1 Изобретение относится к машиностроению и может использоваться при работе с деталями, имеющими перемен ный профиль. Целью изобретения является расширение функциональных возможностей схвата за счет обеспечения возможно ти работы с деталями переменного профиля. На фиг. 1 показан схват, общий вид; на фиг. 2 - вид А на фиг. 1 с условно снятой одной из лент. Схват п.ромьшшенного робота имеет корпус с расположенными в нем приводными роликами 1, связанными с захватными элементами, выполненными в виде гибких лент 2 и 3. На корпус выполнены криволинейные направляющи 4-7, в которых расположены гибкие ленты. Направляющие имеют вьтукловогнутую форму и расположены симмет рично относительно оси схвата в его рабочей зоне. Направляющие выполне ны с сквозными пазами, расположенными соответственно продольным прорезям 8, 9 и 10 направляемой ими ле ты.В направляющих 6 и 7, определяющих движение ленты 3, пазы 11, 12 и 13 совпадают по величине и расположению с прорезями 8, 9 и 10 ленты 3. Аналогично выполнены открытые сквозные пазы в направляющих 4 и 5. Пазы, выполне ные в .направлятацих, позволяют рабочим участкам противолежащих гибких лент свободно располагаться в них. Работа схвата осуществляется сле дующим образом. При захвате детали, расположенно в рабочей зоне схвата, ролики получают вращение, при этом радиус кривизны в лентах 2 и 3 свободных частей уменьшается при одновременном Iувеличении длины свободных частей. 962 Поскольку деталь 14 имеет переменное сечение по высоте, то рабочие участки лент, расположенные в средней 15, 16 для ленты 3, вступят в контакт раньше, чем рабочие участки 17 и 18. После достижения выпуклыми частями, расположенными в средней части 15, 16, участков ленты детали средний ее перегиб фиксируется относительНо детали, при этом начинается охват рабочим участком лент поверхности детали в среднем ее сечении. Поверхность контакта ленты и детали увеличивается . После достижения рабочими участками лент криволинейных поверхностей направляюш 1х начинается движение участков лент в направлении, параллельном оси схвата, при одновре.менном увеличении поверхности контакта рабочих участков лент и детали, что приводит к ее полному охвату. Освобождение детали происходит в обратном порядке. Форму л а изобретения Схват промышленного робота, содержащий корпус с расположенньми в нем приводными роликами, связанными с гибкими лентами, имеющими прорези, при этом на корпусе выполнены криволинейные направляющие для гибких, лент, огибающие ролики, отличающийся тем, что, с целью расширения функциональных возможностей, на направляющих вьшолнены опорные поверхности, расположенные в рабочей зоне схвата, симметрично относительно его ОСИ), при этом в каждой направляющей соответственно прорезям расположенной в ней гибкой ленты выполнены сквозные продольные пазы с возможностью размещения в них рабочих участков другой гибкой ленты.
.fВидА
20 f
Фиг.2
| Схват манипулятора | 1984 |
|
SU1184664A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| в | |||
