i
Изобретение относится к робототенике и может быть использозано для проведения покрасочных, сборочных, сварочных работ.
Цель изобретения - расширение ;технологических возможностей руки тензорного манипулятора.
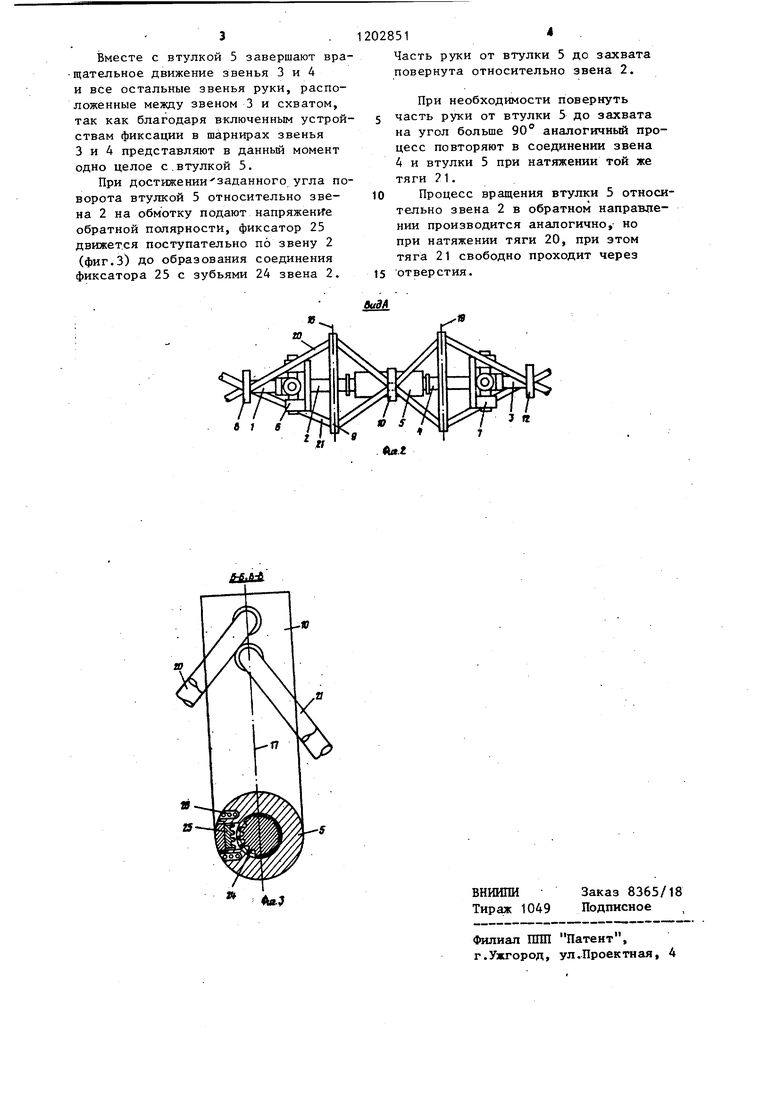
На фиг. 1 изображена рука тензорного манипулятора, общий вид на фиг. 2 - вид А на фиг. 1J на фиг.З - поперечное сечение руки тензорного манипулятора (разрезы Б-Б, В-В на фиг. 1).
Рука тензорного манипулятора содержит звенья 1-4 (фиг.1), шарнирно связанные между собой кинематическими парами. Втулка 5 связана со звено 4, звенья 1 и 2 связаны универсальными шарнирами 6, аналогично звено 3 и 4 - универсальньм шарниром 7. Шарниры 6 и 7 имеют устройства фиксации звеньев 1 и 2, 3 и 4 соответственно относительно осей шарниров и индивидуальные приводы к этим устройствам (не показаны). Каждое звено имеет поперечную пластину, установленную неподвижно относительно звена и перпендикулярно его продольной оси Звено 1 имеет пластину 8, звено 2 - пластину 9, на втулке 5 закреплена дополнительная пластина 10, на звене 4 закреплена пластина 11, а на звене 3 - пластина 12. В каждой пластике выполнено по два отверстия, оси которых параллельны продольной оси соответствующего звена. Кроме того, оси отверстий пересекают продольную, ось пластины. Пересечение осей отверстий 13 и 14 с поперечной осью 15 показано для пластины 8 звена 1, В остальных пластинах пересечение осей выполнено аналогично.
Продольные оси пластин на соседних звеньях расположены перпендикулярно, ось 15 пластины 8 вертикальна, а ось 16 (фиг.2) пластины 9 горизонтальна, аналогично оси 17 и 18 вертикальны, а ось 19 пластины 11 горизонтальна. Оси отверстий 13 и 14, под две свободно проходящие через них тяги 20 и 21 расположены симметрично относительно продольной оси звена 1. Аналогичным образом расположены оси отверстий на пластинах 9, 11 и 18. На пластине 10 втулки 5 оси отверстий 22 и 23 расположены по одну сторону от продольной оси втулки 5 и пересекают ось 17.
028512
Втулка 5 соединена с соседним звеном 2 через вращательную кинематическую пару, ось вращения которой совпадает с продольными осями звень- 5 ев 2 и втулки 5. Контактные поверхности звена 2 и втулки 5 образуют подвижное соединение. На части контактной поверхности звена 2, расположенной внутри втулки 5, на- 0 резаны зубья 24 эвольвентного профиля (фиг.З).
Во втулке 5 соответственно нарезанной части звена 2 установлен фиксатор 25 с зубьями звольвентного )5 профиля, а вокруг него в кольцевой расточке втулки 5 размещена обмотка соленоида 26. Фиксатор 25 установлен во втулке 5 с возможностью поступательного перемещения относительно 0 последней. На звене 2 закреплён
упор 27. Втулка 5 соединена с соседним звеном 4 аналогично подвижному соединению звена 2 и втулки 5. Тяги 20 и 21 закреплены одними концами 5 на охвате (не показан), расположенном за звеном 3, а другими концами - с приводами.
Рука тензорного манипулятора ра- .ботает следующим образом. Q При необходимости осуществить поворот звеньев 3 и 4 и втулки 5 относительно звена 2 по часовой стрелке замыкают устройства фиксации звеньев относительно оси шарнира в универсальных шарнирах 6 и 7, исключая тем самым возможность поворота звена 2 относительно звена 1 и звена 3 относительно звена 4.
На обмотку соленоида 26 подают напряжение. Фиксатор 25 под действием магнитного поля движется поступательно в крайнее левое положение звена. При этом зубья фиксатора 25 выходят из зацепления с зубьями звена 2. Втулка 5 свободна, не зафиксирована относительно звена 2.
При включении привода тяги 21 последняя натягивается в обеспечивает поворот втулки 5 относительно звена 2, так как тяга находится на
5
0
0
некотором расстоянии от оси вращения звена 2 и втулки 5 (фиг.З) и поэтому натяжение в тяге 20 создает крутящий момент относительно этой ,оси. Упор 27 фиксирует втулку 5 от 5 поступательного движения относительно звена 2. При этом тяга 20 свободно проходит через отверстия в пластинах;
Вместе с втулкой 5 завершают вра- щательное движение звенья 3 и 4 и все остальные звенья руки, расположенные между звеном 3 и схватом, так как благодаря включенным устрой ствам фиксации в шарнирах звенья 3 и 4 представляют в данный момент одно целое с.втулкой 5.
При достижении заданного угла поворота втулкой 5 относительно звена 2 на обмотку подают напряжен1Те обратной полярности, фиксатор 25 движется поступательно по звену 2 (фиг.З) до образования соединения фиксатора 25 с зубьями 24 звена 2.
1202851
Часть руки от втулки 5 до захвата повернута относительно звена 2.
5
10
15
При необходимости повернуть часть руки от втулки 5 до захвата на угол больше 90° аналогичный процесс повторяют в соединении звена 4 и втулки 5 при натяжении той же тяги 21.
Процесс вращения втулки 5 относительно звена 2 в обратном направлении производится аналогично, но при натяжении тяги 20, при этом тяга 21 свободно проходит через отверстия.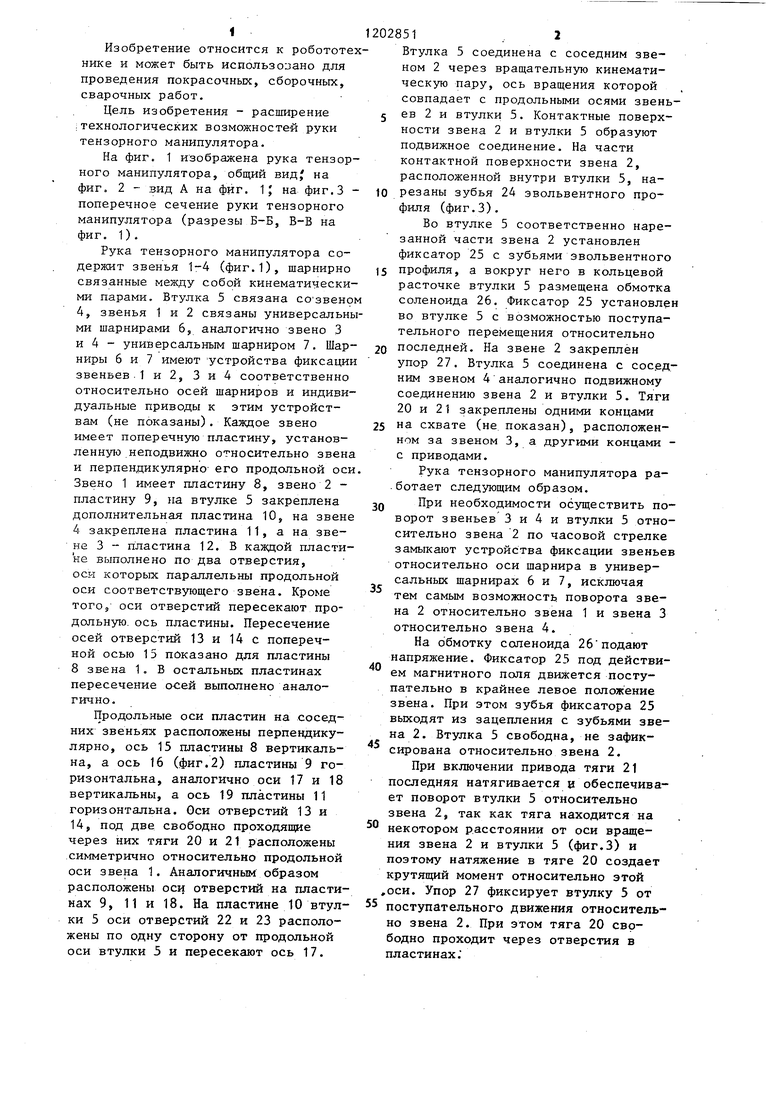
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука тензорного манипулятора | 1983 |
|
SU1114545A1 |
| Рука манипулятора | 1985 |
|
SU1263520A1 |
| Рука манипулятора | 1984 |
|
SU1248792A1 |
| МАНИПУЛЯТОР | 2003 |
|
RU2247648C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| СТАНОК ДЛЯ ОБРУБКИ, КЛЕПКИ, ТРАМБОВКИ | 2009 |
|
RU2412783C1 |
| Поточная линия для изготовления модельного блока в точном литье | 1983 |
|
SU1473900A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Устройство для подключения печатных плат | 1989 |
|
SU1706068A1 |
| Рука манипулятора | 1985 |
|
SU1321576A1 |

У п
9шг
V
вниипи
Тираж 1049
Заказ 8365/18 Подписное
Филиал ШШ Патент, г.Ужгород, ул.Проектная, 4
| Рука тензорного манипулятора | 1983 |
|
SU1114545A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
