1
Изобретение относится к робототехнике и предназначено для использования в роботах с большой степенью подвижности.
Целью изобретения является повышение производительности за счет сокращения времени позиционирования схвата.
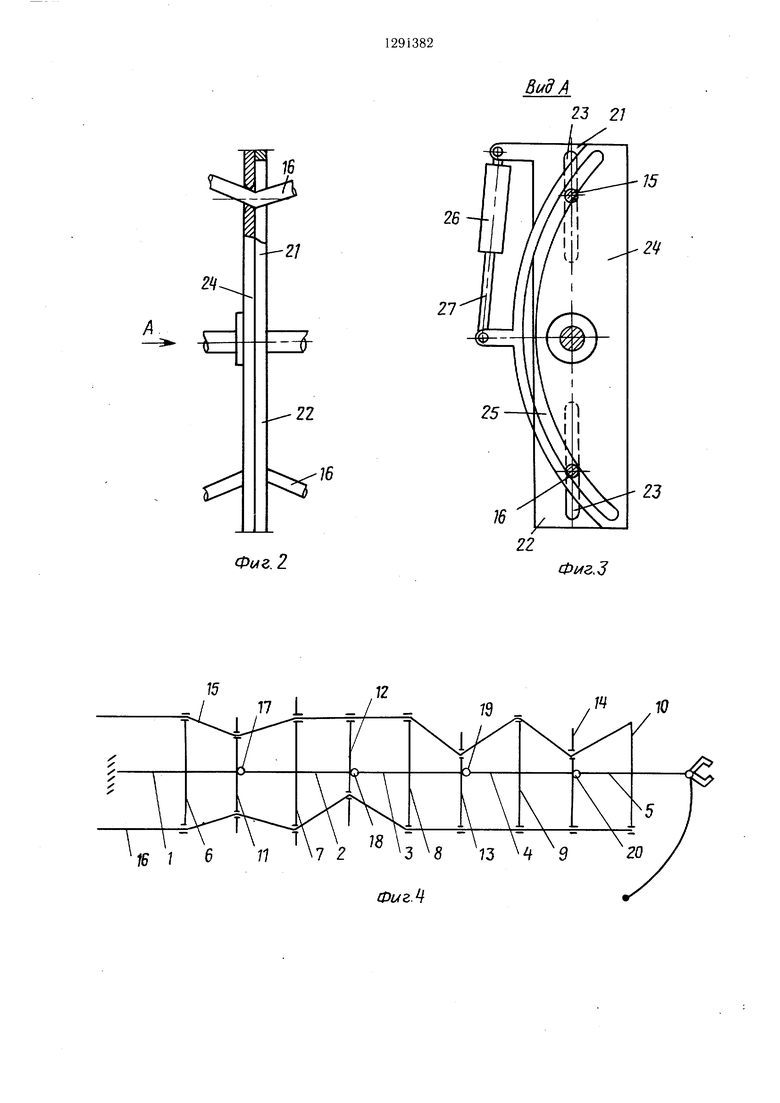
На фиг. 1 показана кинематическая схема руки манипулятора; на фиг. 2 - механизмы изменения стрелы прогиба тяг; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - рука
1291382
Для этого в шарнире 20 (фиг. 4) изменяют стрелу прогиба тяг 15 и 16 между поперечными пластинами 10 и 9 механизмом
14изменения стрелы прогиба тяг, при этом стрелу прогиба тяги 16 уменьшают, стрелу прогиба тяги 15 увеличивают.
Для осуш,ествления требуемого движения в шарнире 19 изменяют стрелу прогиба тяг
15и 16 между поперечными пластинами 9 и 8 механизмом 13 изменения стрелы проманипулятора с измененной стрелой прогиба 10 гиба тяг, при этом стрелу прогиба тяги 16
уменьшают, стрелу прогиба тяги 15 увеличивают.
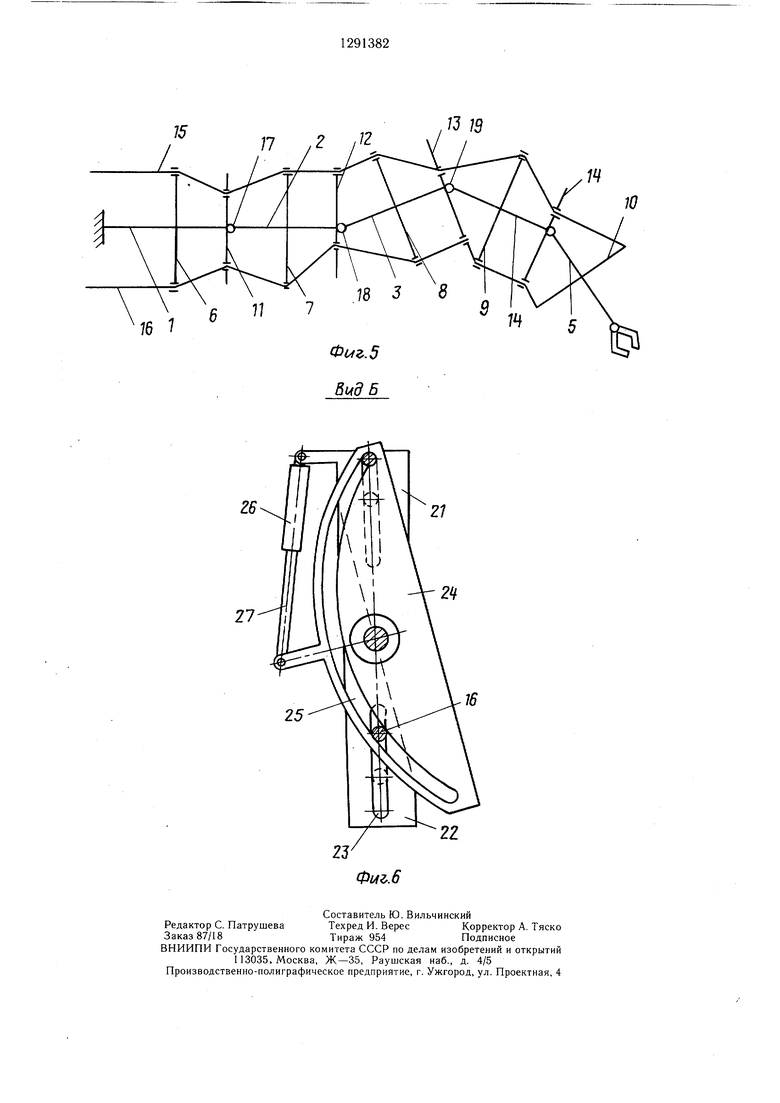
Для осуш,ествления требуемого движения в шарнире 18 изменяют стрелу прогиба тяг 15 и 16 между поперечными пласЗвена 1 закреплено на стойке. На звене 5 раз- тинами 8 и 7 механизмом 12 изменения мешен рабочий орган манипулятора (схват), стрелы прогиба тяг, при этом стрелу прогиба тяги 16 увеличивают, стрелу прогиба тяги 15 уменьшают. После того, как законтяг; на фиг. 5 - рука манипулятора при измененном положении звеньев; на фиг. 6 - механизм изменения стрелы прогиба тяг в крайнем положении.
Рука манипулятора содержит звенья 1-5
снабженный механизмами фиксации звеньев. Каждое звено содержит поперечную пластину: звено 1 - пластину 6, звено 2 - пластину 7, звено 3 - пластину 8, звено 4 - пластину 9, звено 5 - пластину 10. На звеньях размешены механизмы изменения стрелы прогиба тяг: на звене 1 - механизм 11, на звене 2 - механизм 12, на звене 3 - механизм 13, на звене 4 - механизм 14. Тяги 15 и 16 пропущены сквозь 25 отверстия в поперечных пластинах 6-9 и сквозь механизмы 11 -14 изменения стрелы прогиба тяг. Звенья 1-5 соединены между собой шарнирами 17-20, снабженными механизмами фиксации.
Механизм изменения стрелы прогиба тяг выполнен в виде двух пластин 21 и 22, жестко закрепленных на соответствующих звеньях, имеющих радиальный паз 23, поворотной пластины 24, подвижно смонтированной на пластинах 21 и 22 и снабженной криволинейным пазом 25, и привода, корпус 26 которого шарнирно связан с пластиной 21, а выходной подвижный элемент 27 - с поворотной пластиной 24.
Рука манипулятора работает следую- до щим образом.
При необходимости переместить рабочий орган руки манипулятора в заданную точку зоны обслуживания, например в точку В (фиг. 4), требуется совершить движение в нескольких шарнирах руки: звено 5 повернуть относительно звена 4 по часовой стрелке, звено 4 повернуть относительно звена 3 по часовой стрелке, звено 3 повернуть относительно звена 2 против часовой стрелки.
чено изменение стрелы прогиба тяг, выклю- 2Q чаются устройства фиксации шарниров 18- 20 и включается привод тяг. При достижении требуемого угла поворота звеньев одно относительно другого включаются устройства фиксации в соответствуюших шарнирах.
Формула изобретения
Рука манипулятора, содержащая ряд шарнирно соединенных звеньев, выполненных в виде стержней с поперечными пластинами, в которых симметрично относительно оси звеньев выполнены два отверстия для прохода тяг, закрепленных одним концом на руке перед первым шарниром со стороны схвата, а другим концом связанных с приводом, а также содержащая расположенные в щарнирах механизмы фиксации звеньев друг относительно друга, отличающаяся тем, что, с целью повышения производительности за счет сокращения времени позиционирования, она снабжена расположенными в щарнирах звеньев механизмами изменения стрелы прогиба тяг, каждый из которых выполнен в виде двух пластин, жестко закрепленных на соответствующем звене и имеющих paдиaJiьный паз, поворотной пластины, подвижно смонтированной на первых двух пластинах и снабженной криволинейным пазом, и привода, корпус и выходной элемент которого шарнирно связаны с одной из первых двух пластин и с поворотной пластиной соответственно, при этом каждая тяга проходит через пазы в указанных пластинах.
35
45
Для этого в шарнире 20 (фиг. 4) изменяют стрелу прогиба тяг 15 и 16 между поперечными пластинами 10 и 9 механизмом
14изменения стрелы прогиба тяг, при этом стрелу прогиба тяги 16 уменьшают, стрелу прогиба тяги 15 увеличивают.
Для осуш,ествления требуемого движения в шарнире 19 изменяют стрелу прогиба тяг
15и 16 между поперечными пластинами 9 и 8 механизмом 13 изменения стрелы про5
о
чено изменение стрелы прогиба тяг, выклю- Q чаются устройства фиксации шарниров 18- 20 и включается привод тяг. При достижении требуемого угла поворота звеньев одно относительно другого включаются устройства фиксации в соответствуюших шарнирах.
Формула изобретения
Рука манипулятора, содержащая ряд шарнирно соединенных звеньев, выполненных в виде стержней с поперечными пластинами, в которых симметрично относительно оси звеньев выполнены два отверстия для прохода тяг, закрепленных одним концом на руке перед первым шарниром со стороны схвата, а другим концом связанных с приводом, а также содержащая расположенные в щарнирах механизмы фиксации звеньев друг относительно друга, отличающаяся тем, что, с целью повышения производительности за счет сокращения времени позиционирования, она снабжена расположенными в щарнирах звеньев механизмами изменения стрелы прогиба тяг, каждый из которых выполнен в виде двух пластин, жестко закрепленных на соответствующем звене и имеющих paдиaJiьный паз, поворотной пластины, подвижно смонтированной на первых двух пластинах и снабженной криволинейным пазом, и привода, корпус и выходной элемент которого шарнирно связаны с одной из первых двух пластин и с поворотной пластиной соответственно, при этом каждая тяга проходит через пазы в указанных пластинах.
5
В ид A
23 21
16
21
2ff
22
16
-23
16
.2
Фиг,3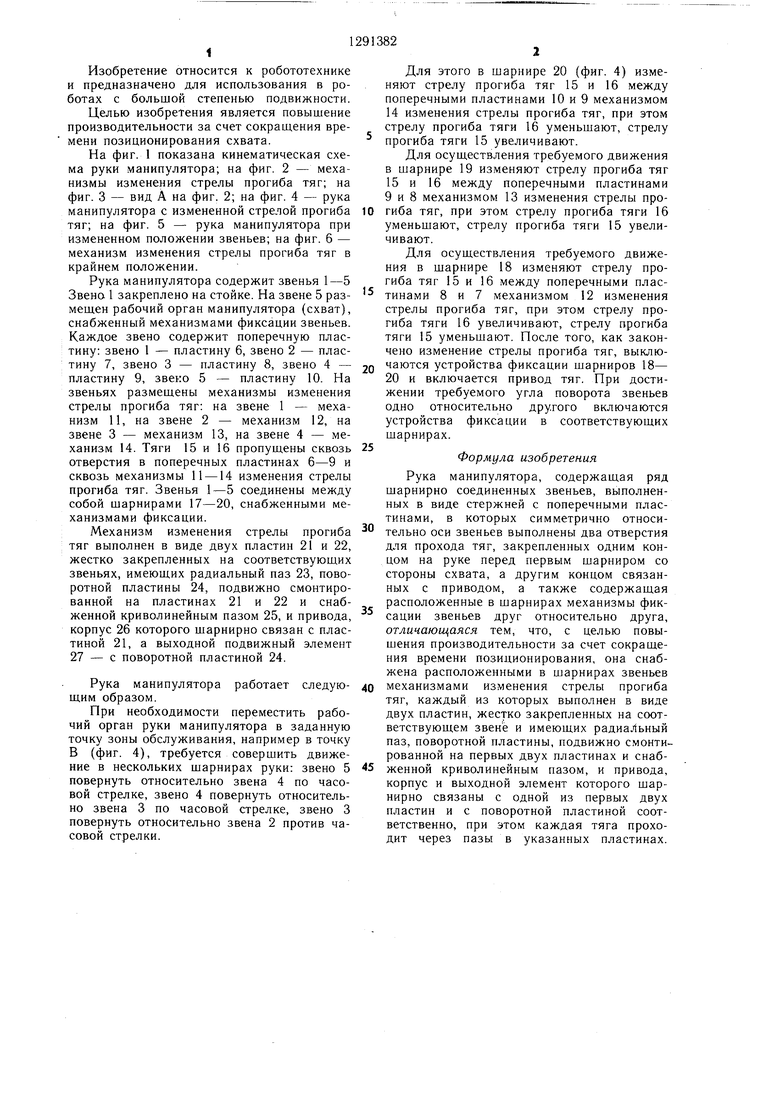
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1987 |
|
SU1495125A1 |
| Рука манипулятора | 1987 |
|
SU1450995A1 |
| Рука тензорного манипулятора | 1983 |
|
SU1114545A1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Манипулятор | 1980 |
|
SU1050863A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Рука манипулятора | 1985 |
|
SU1303400A1 |
| Манипулятор | 1982 |
|
SU1085805A1 |
| Схват манипулятора | 1987 |
|
SU1492495A1 |
| Исполнительный орган манипулятора | 1986 |
|
SU1323364A1 |
Изобретение относится к робототехнике и предназначено для автоматизации (механизации) выполнения технологических операций. Позволяет повысить производительность за счет сокращения времени позиционирования схвата. Рука содержит ряд шарнирно соединенных звеньев 1-5, снабженных поперечными пластинами 6-10, в которых симметрично относительно оси звеньев выполнены отверстия. В зоне шарниров звеньев расположены механизмы изменения стрелы прогиба тяг 11 -14. Гибкие тяги 15 и 16 одним концом закреплены на пластине 10, проходят через отверстия в поперечных пластинах 6-10 и через механизмы изменения стрелы прогиба тяг 11 -14 и другими концами связаны с приводом. В шарнирах звеньев имеются механизмы фиксации. Для осуществления требуемого движения схвата изменяют стрелу прогиба тяг между поперечными пластинами, выключают механизмы фиксации и включают приводы тяг 15 и 16. При достижении требуемого угла поворота звеньев одно относительно другого включаются механизмы фиксации в соответствующих шарнирах. 6 ил. (Л Ч6 Ю Ю со со 00 |С 20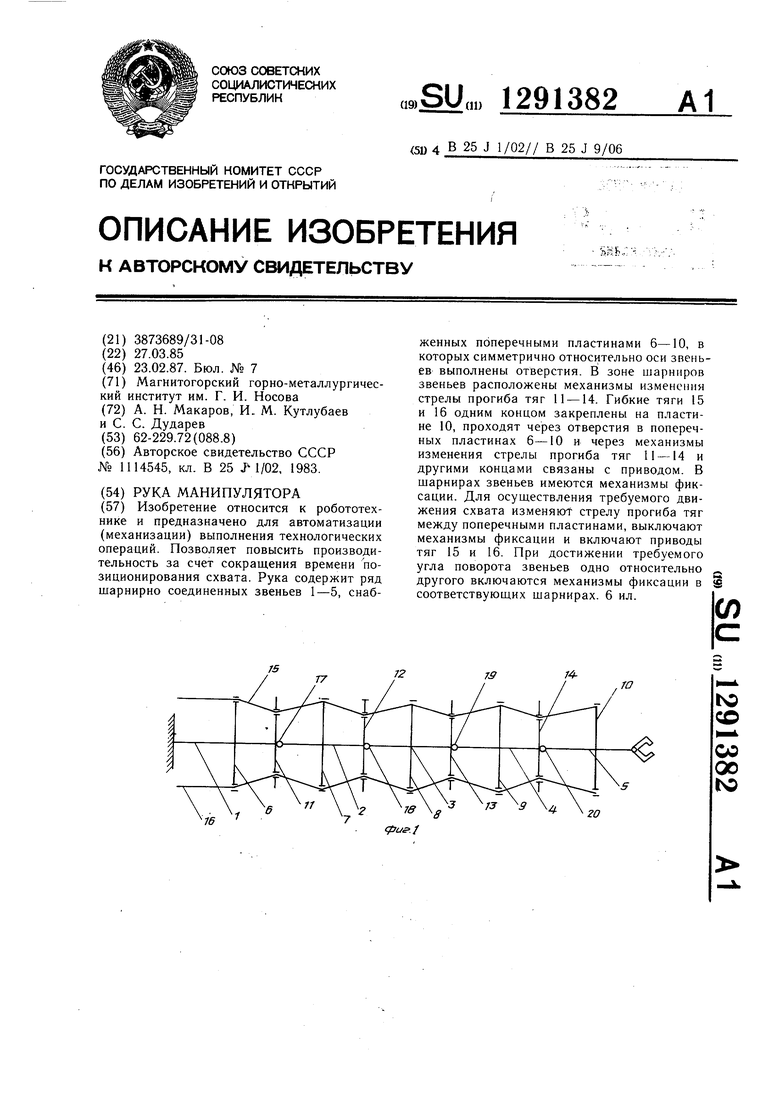
Фиг.
/3 /5
W
Ю
Z1
2ff
16
Составитель Ю. Вильчинский
Редактор С. ПатрушеваТехред И. ВересКорректор А. Тяско
Заказ 87/18Тираж 954Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фи.6
| Рука тензорного манипулятора | 1983 |
|
SU1114545A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
