Изобретение относится к робототехнике и предназначено для использования в конструкциях роботов с больЕГим числом степеней подвижнс сти.
Целью изобретения является расширение технологических возмола-юсте за счет увеличения зоны обслуживания т.е. обеспечения большого угла поворота схвата.
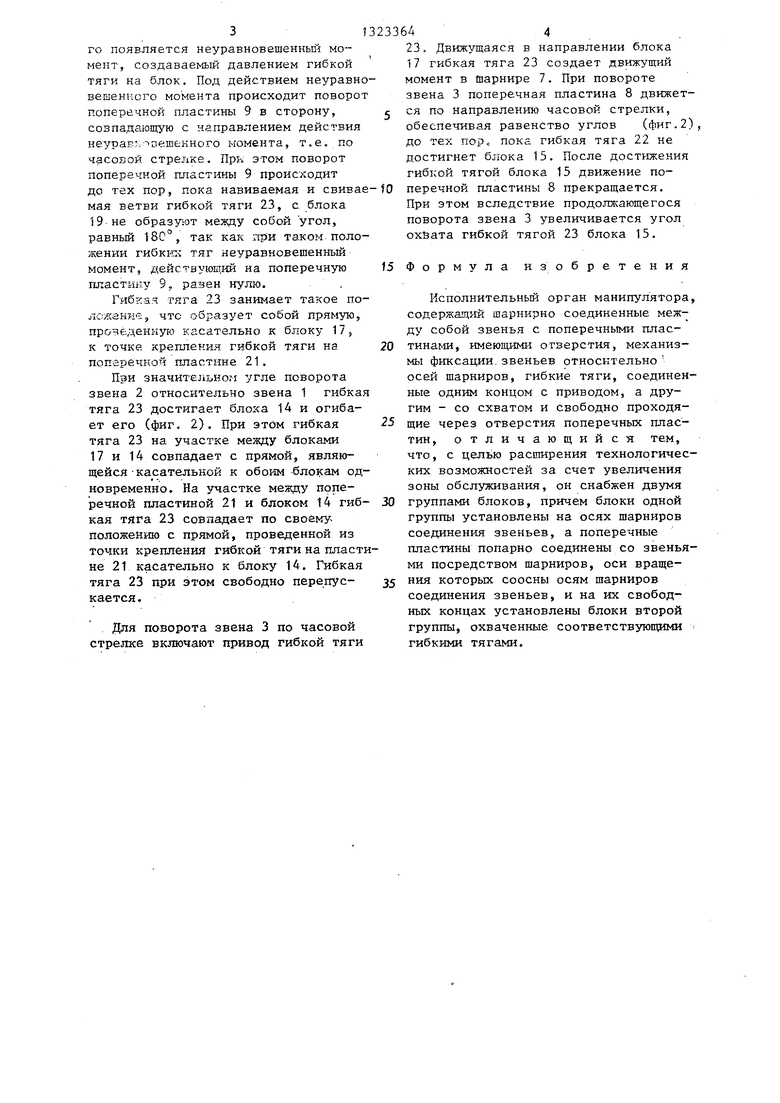
Hd фиг. 1 изображена кинематическая схема исполнительного органа манипулятора { на фиг. 2 - промежуточное положение исполнительного органа
Исполнительный орган манипулятора содержит звенья 1, 2 и 3 со схва- том и неподвижную стойку 4, Звенья соедюшны между собой шарнирами 5, 6 и 7, Со звеном 1 соединены поперэч ные пластины 8 и 9 посредством ;uap-- ниров 10 и 11, оси вращения которых сооскы.оси шарнира б. На неподнчжной стойке 4 неподвижно закрегшешл направляющие, HanpHi iep попереч 1ые пластины 12 и 13,
Исполнительный орган маниггул.ч гора содержат две группь блоков. Блоки 14 и 15 одной группы установлены иа ося шарниров 6 и 7 соединения звеньев. Блоки 16 и 17, 18 и 19 второй группы установлены соответственно на свободных концах направляющих 12 п 13 и поперечных пластин 8 и 9„
На. последнем из пр1-изоди Я;1х г, .. з:;- жение звеньев звене 3 поперечные пластины 20, и 21 установлены нено-- движло относительно звена.
Двшкение от привода, устанозочеинс го на неподвижной стойке 4 (не показан) , передается на звенья через гибкие тяги 22 и 23. Гибкая тяга 22 обеспечивает движение звеньев против часовой стрелки. Гибкая тяга 23 по часовой стрелке. Гибкие тяги 22 и 23 закреплены соответственно одними концами на поперечных пластинах 20 и 21 звена 3, противоположными концами гибкие тяги закреплены на выходных элементах привода. Блоки 14 и 15 имеют возможность контактиро вать с гибкими тягами 22 и 23 при достижении их последними и обеспечивают удаление гибких тяг от осей шарниров 6 и 7 при предельньш положениях звеньев 2 и 3 (фиг. 2).
Гибкая тяга 22 охватывает блоки 16 и 1.8. Гибкая тяга 23 охватывает блоки 17 к 19, При этом охват гибкими тягами этих блоков выполнен по
0
0
0
5
0
5
всрму периметру каждого блока. В кг1/1ч том шарнире размещено устройство фиксации относительного движения звеньев (не показаны).
Исполнительный орган манипулятора работает следующем образом.
При необходимости совершить поворот звена 2 относите.пьно звена 1 (против часовой стрелки) и обеспечить поворот звена 3 относительно 2 по часовой стрелке поочередно включают приводы гибких тяг 22 и 23.
После включения привода гибкие тяги 22 выключает устройство фиксации двжкения звена 2 относительно звена
1. Иод действием двшкутдейся гибкой тяги 22 в щарнирах 5s & и 7 созда- етс.я вращак щкй момент. Под действием.:; этого момента в шарнире б происходят относительное движение звена
2против часоЕюй стрелки. При этом часть гибкой тягк 22, заключенная между блоком и поперечной пластиной 20J навивается на блок 18, увеличивая тем самым угол охвата гибкой тягой блока 18.
Увеличение угла охвата происходит на части бяока, расположённой справа от пластины 8. Аналогичная часть угла охвата блока 16 слева от поперечной гшастины 8 (фиг. 1) не меня- етс:т. Это приводит к тому, что величина момента, создаваемого давлением г 1:бкой тяги на. блок 16 относительно оси вращения гюперечной пластины 8 справа от нее больше, чем величина ана погичного момента слева от поперечной пластины.
Под действием неуравновешенного момента, создаваемого давлением гибкой тяги на блок 18, поперечная пластина вращается против часовой стрелки. При этом величина неуравновешенного момента уменьшается. Процесс поворота поперечной плacтIiны 8 и поворот звена 2 идут одновременно. Одновременно поворачивается поперечная пластина 9. В исходном положении (фиг. 1) углы, образованные навиваемой и свиваемой ветвями гибкой тяги 23 с блока 19 поперечной пластины 9, одинаковы между собой и равны 90 . В процессе поворота звена 2 относительно звена 1 углы охвата гибкой тягой 23 блока 19 слева и справа от поперечной пластины 9 изменяются. Угол охвата справа от поперечной ппастины уменьшается. Вследствие этого появляется неуравновешенньй момент, создаваемый давлением гибкой тяги на блок. Под действием неуравно вешенмого момента происходит поворот поперечной пластины 9 в сторону, совпадающую с направлением действия неурав;;, свешенного момента, т.е. по часовой стрелке. При этом поворот поперечной пластины 9 происходит до тех пор, пока навиваемая и свивае мая ветви гибкой тяги 23, с блока 19-не образуют между собой угол, равньш 180°, так как при таком.положении гибкш тяг неуравновешенный момент, действующий на поперечную пластику 9. равен нулю.
Гибкая тяга 23 занимает такое по- лояенне,, что образует собой прямую, прове:денную касательно к блоку 17, к точке крепления гибкой тяги на поперечной пластине 21.
При значительном угле поворота звена 2 относительно звена 1 гибкая тяга 23 достигает блока 14 и огибает его (фиг, 2). При этом гибкая тяга 23 на участке между блоками 17 и 14 совпадает с прямой, являющейся касательной к обоим -блокам одновременно. На участке между поперечной пластиной 21 и блоком 14 гиб- кая тяга 23 совпадает по своему положению с прямой, проведенной из точки крепления гибкой тяги на пластине 21 касательно к блоку 14, Гибкая тяга 23 при этом свободно перепус- кается.
Для поворота звена 3 по часовой стрелке включают привод гибкой тяги
23. Движущаяся в направлении блока 17 гибкая тяга 23 создает движущий момент в Шарнире 7. При повороте звена 3 поперечная пластина 8 движется по направлению часовой стрелки, обеспечивая равенство углов (фиг,2 до тех пор, пока гибкая тяга 22 не достигнет блока 15. После достижения гибкой тягой блока 15 движение поперечной пластины 8 прекращается. При этом вследствие продолжающегося поворота звена 3 увеличивается угол охвата гибкой тягой 23 блока 15.
Формула изобретения
Исполнительньй орган манипулятора содержащий шарнирно соединенные между собой звенья с поперечными пластинами, имеющими отверстия, механизмы фиксации, звеньев относительно осей шарниров, гибкие тяги, соединенные одним концом с приводом, а другим - со схватом и свободно проходящие через отверстия поперечных пластин, отличающийся тем, что, с целью расширения технологических возможностей за счет увеличения зоны обслуживания, он снабжен двумя группами блоков, причем блоки одной группы установлены на осях шарниров соединения звеньев, а поперечные пластины попарно соединены со звеньями посредством шарниров, оси вращения которых соосны осям шарниров соединения звеньев, и на их свободных концах установлены блоки второй группы, охваченные соответствующими гибкими тягами.
16
20.
Сриг. Z
ор Л.Повхан 2914/19
Составитель И.Бэкулина Техред АО Кравчук
Корр Подп
Тираж 953 ВНИИПИ Государственного комитета СССР
iio делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор М.Демчик Подписное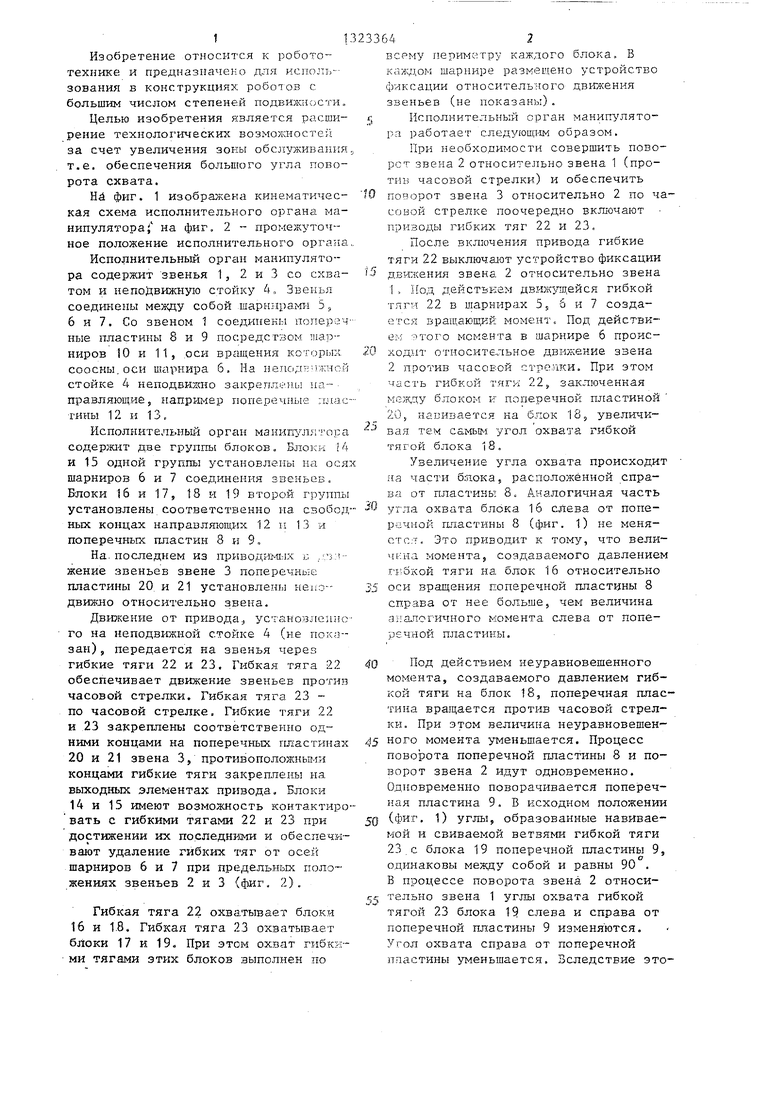
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1986 |
|
SU1333564A1 |
| Рука манипулятора | 1985 |
|
SU1291382A1 |
| Рука манипулятора | 1985 |
|
SU1321576A1 |
| Рука манипулятора | 1985 |
|
SU1263520A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| РОБОТ, ВЫПОЛНЕННЫЙ С ИСПОЛЬЗОВАНИЕМ ПРИНЦИПА ПАРАЛЛЕЛОГРАММА | 2016 |
|
RU2663510C2 |
| Рука тензорного манипулятора | 1984 |
|
SU1202851A1 |
| Манипулятор | 1986 |
|
SU1404324A1 |
| Манипулятор | 1990 |
|
SU1722807A1 |
| Рука манипулятора | 1985 |
|
SU1306705A1 |
Изобретение относится к робото- технике и предназначено для использования в конструкциях роботов с большим числом подвижности. Целью . изобретения является расширение технологических возможностей за счет увеличения зоны обслуживания, т.е. обеспечения большего угла поворота схвата. Для этого поперечные пластины 8 и 9 соединены со звеньями посредством шарниров 10 и 11, так что оси вращения этих шарниров соосны оси шарнира 6 соединения звеньев 1 и 2. Блоки 14 и 15 одной группы блоков установлены на осях шарниров 6 и 7 соединения звеньев с возможностью взаимодействия с гибкими тягами 22 и 23. На свободных концах поперечных пластин 8, 9, 12 и 13 установлены соответственно блоки 16, 17, 1в и 19, охватьюаемые гибкими тягами 22 и 23, одни концы которых связаны с приводами, а другие - со схватом. 2 ил. с (Л 18 7 гг 20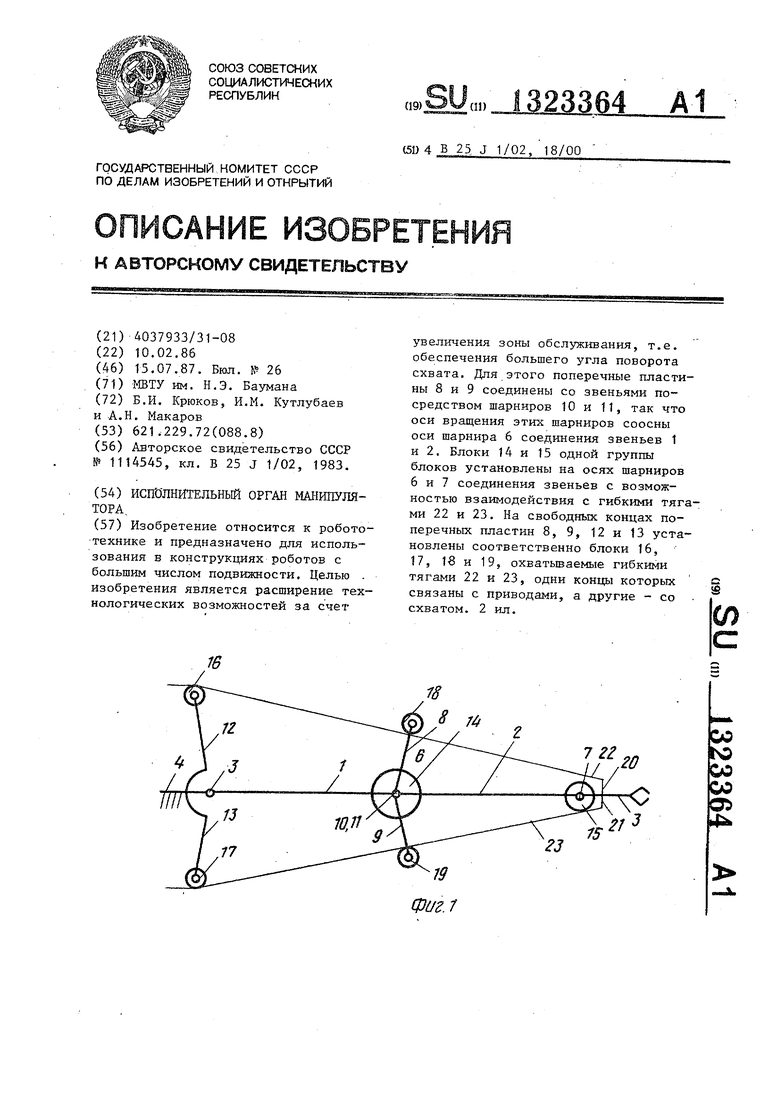
| Рука тензорного манипулятора | 1983 |
|
SU1114545A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
