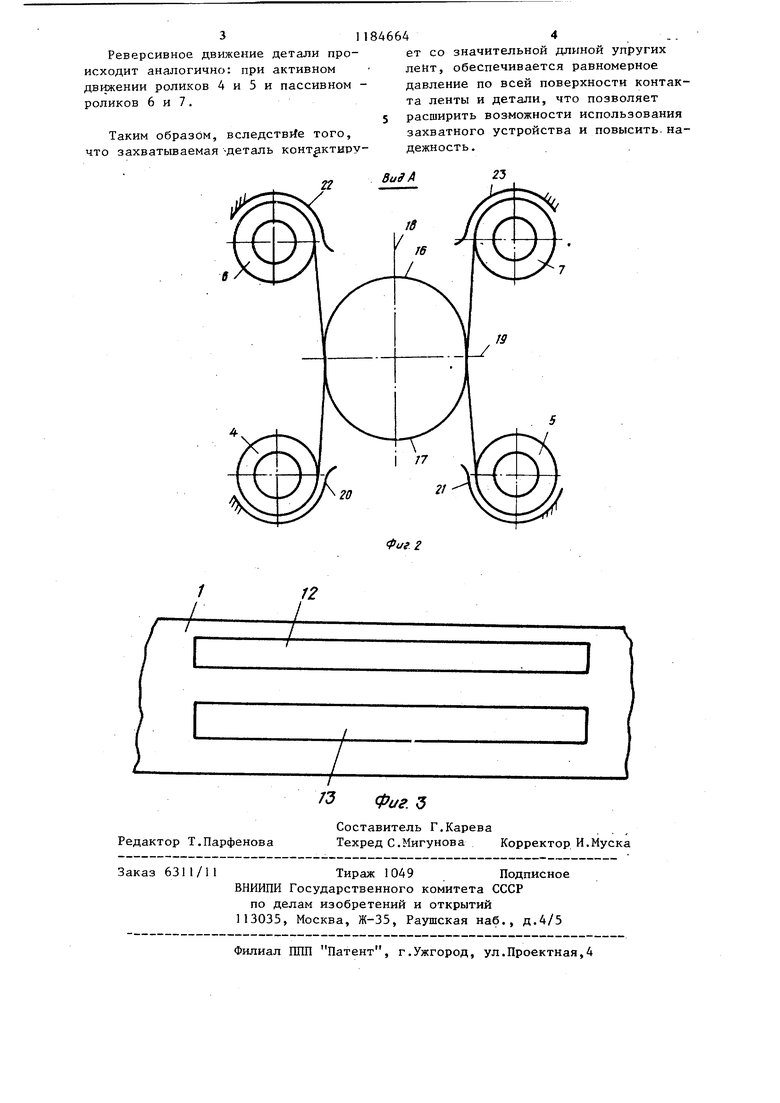
Изобретение относится к машиностроению и может быть использовано в качестве схвата манипулятора. Цель изобретения - повьшение надежности и производительности труда за счет упрощения конструкции, а также осуществления ротации и радиального перемещения захватываемой детали.. На фиг.1 показан захват промьшленного робота, общий вид; на фиг.2 вид А на фиг.1; на фиг.З - лента Iвразвернутом виде). Захват промьшшенного робота имеет захватные губки, выполненные в виде дугообразных упругих гибких лент 1 и 2 (фиг.О . Средний перегиб ленты 1 расположен за осью 3 по отношению к роликам 4,5, на которых жестко закреплены противопо ложные концы ленты 1. Аналогично установлена лента 2, концы которой закреплены на роликах 6 и 7. Ролики 4-7 жестко и соосно связаны с осями 8-1 соответственно, последние кинематически связаны с приводом. В ленте 1 выполнены прорези 12 . и 13 (фиг.З), в которых расположены продольные участки 14 и 15 ленты 2. Рабочий участок 16 ленты 1 и раб чий участок 17 ленты 2 образуют замкнутую криволинейную поверхность Оси роликов 8-11 снабжены индивиду приводами. Рабочие учас ки лент 16 и 17 расположены симметр но относительно осей 18 и 19. Вокру каждого ролика на участке схода с н го ленты расположены направляющие лент 20-23, жестко связанные с непо вижным элементом привода (на фиг. 1 показано) . Захватное устройство работает сл дующим образом. Захват детали. Деталь располагается внутри межд губками, образованными рабочими уча 16 и 17 лент 1 и 2. После вклю чения приводов ролики 4 и 7 (фиг.2} вращаются по часовой стрелке, а рол ки 5 и 6 - против часовой стрелки. Лента 1 наматывается равномерно на ролики 4 и 5, а лента 2 - на ролики 6 и 7 . При этом сокращаются длин рабочих участков лент 16 и 17, кото рыв перемещаются навстречу друг дру гу до охвата детали. Освобождение детали. Ролики 4-7 дают реверсивное направление вращения. Ролики 4 и 7 вращаются против часовой стрелки, ролики 5 и 6 - по часовой стрелке. Ленты 1 и 2 сматываются соответственно с роликов 4,5 и 6,7. При зтом ленты 1 и 2 контактируют с неподвижными направляюш 1ми 20,21 и 22,23 и перемещаются вдоль них, вследствие чего происходит увеличение длины рабочих участков 16 и 17, увеличивается радиус кривизны этих участков, образуется зазор между рабочими участками ленты 1 и захватываемой деталью. Деталь освобождается. Ротация детали. Захватное устройство обеспечивает ротацию деталей типа тел вращения относительно оси 3 захвата. Для этого после окончательного захвата детали все приводы роликов 4-7 включаются и вращают ролики в одном направлении с одинаковой скоростью, например по часовой стрелке. Между лентой 1 и деталью не появляется зазора и лента не теряет контакта с деталью. Так как деталь имеет контакт с движущимися лентами 1 и 2, то под действием сил трения возникает вращающий момент вокруг оси 3 против часовой стрелки. Для ротации детали в обратном направлении необходимо вращать ролики 4-7 против часовой стрелки. Позиционирование детали. Захват манипулятора обеспечивает тонкое позиционирование детали по оси 18. После окончательного зажима детали включают приводы ролика 6 с направлением вращения против часовой стрелки, ролика 7 - по часовой стрелке . Вращение происходит аналогично захвату детали и с одинаковой скоростью. Длина изогнутой части ленты 2 сокращается, рабочий участок ленты 17 приближается к оси 3, увлекая вместе с собой зажатую деталь. Приводы роликов 4 и 5 работают в режиме генераторов, поэтому создают силу, препятствующую движению детали в направлении к роликам 6 и 7, но меньшую по абсолютной величине, чем движущая сила, создаваемая роликами 6 и 7. Деталь движется вдоль оси 18 в направлении к роликам 6 и . не теряя контакта с лентами 1 и 2.
31184664 .-
Ре.„с„.„ое „,„.ни. де.али „Р„-е. со --.еяь„ой .Р,г„х
- „ роликов Ь и /. расширить возможности использования
Таким образом, вследствие того, что захватываемая-деталь конт ктиРУ
захватного устройства и повысить, надежность.
ви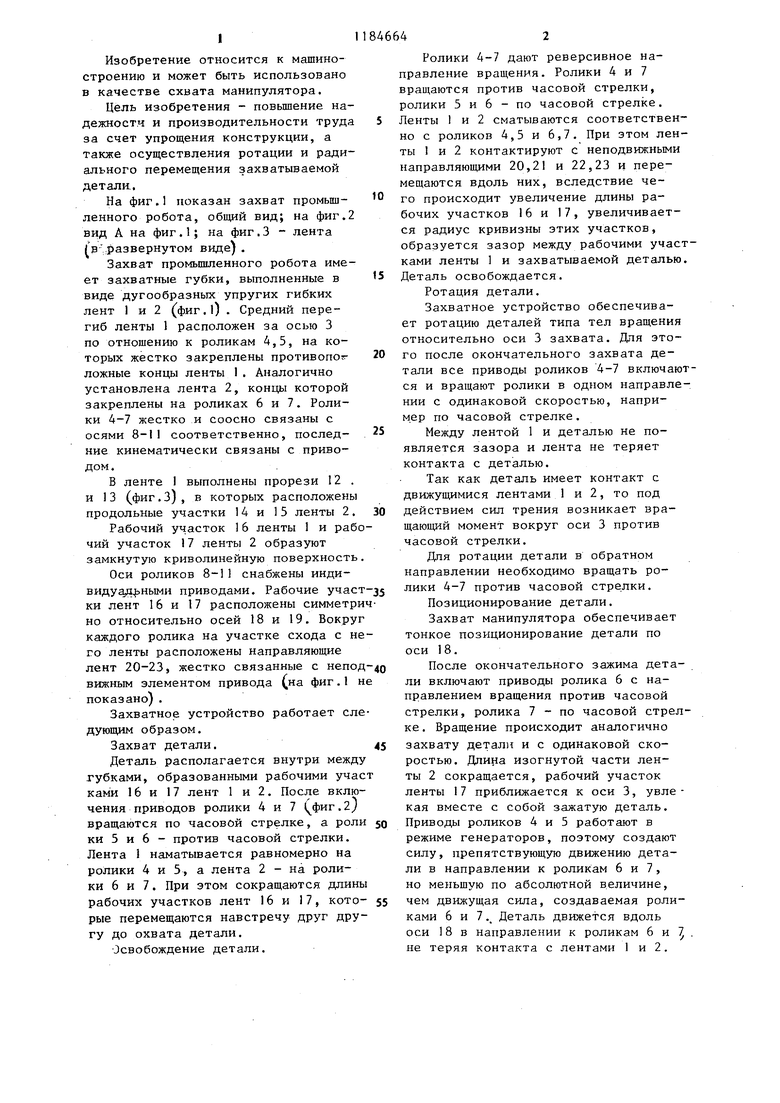
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1985 |
|
SU1269996A1 |
| Исполнительный орган манипулятора | 1986 |
|
SU1323364A1 |
| Рука манипулятора | 1985 |
|
SU1291382A1 |
| Рука манипулятора | 1985 |
|
SU1321576A1 |
| Рука манипулятора | 1985 |
|
SU1263520A1 |
| Рука манипулятора | 1985 |
|
SU1306705A1 |
| Рука манипулятора | 1984 |
|
SU1248792A1 |
| Рука тензорного манипулятора | 1984 |
|
SU1202851A1 |
| Рука манипулятора | 1986 |
|
SU1333564A1 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
СХВАТ МАНИПУЛЯТОРА, содержащий корпус, привод для перемете/ff /4 ния захватных элементов, выполненных в виде двух упругих гибких лент, одни концы которых жестко закреплены на роликах, установленных на осях в корпусе, отличающийся тем, что, с целью расширения функциональных возможностей, он снабжен дополнительной парой роликов, о которыми жестко связаны вторые концы упругих гибких лент, в одной из них выполнены прорези, в которых размещена часть другой ленты, а на корпусе установлены направляющие упругих гибких лент. сл 00 4 а О)
1 12
Г I
| Захватное устройство | 1978 |
|
SU785028A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
