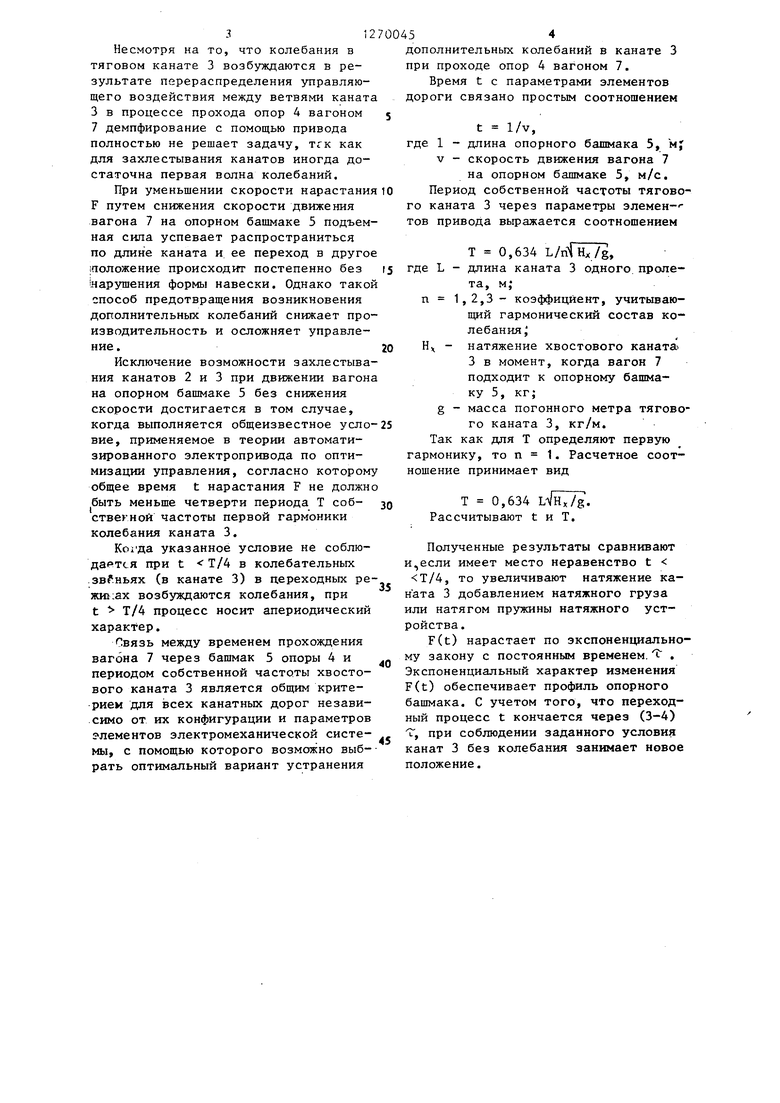
1 Изобретение относится к автоматизированному электроприводу и может быть использовано при наладочных работах электромеханической системы ка натной дороги для устранения возникновения дополнительных колебаний в канатах при проходе опор, вагоном. Цель изобретения - повышение безопасности движения вагона аутем устранения возможности захлестывания ка натов в момент прохода вагона через башмак опоры. На фиг.1 дана схема канатной доро ги, на фиг.2 - график усилия движения вагона. На фиг.1 обозначены верхняя станция 1, несущий канат 2, тяговый канат 3, опора 4, опорный башмак 5, нижняя станция 6, вагон 7. График усилия движения вагона 7 (фиг.2) показывает зависимость его о местонахождения вагона 7 при движени сверху вниз (сплошная линия) и снизу вверх (пунктирная линия). Тяговый канат 3 глухо закреплен с обеих сторон на вагоне 7, огибает . приводной и направляющий шкивы, уста новленные на станциях 1 и 6, и движется вместе с вагоном 7. Вагон 7 подвешен и перемещается по неподвижному несущему канату 2, концы которо го закреплены на станциях 1 и 6. В нормальных условиях дорога рабо тает следующим образом. Оператор, принимая информацию о r готовности к отправке вагона 7, запу скает привод по направлению движч1ия вагона 7 от верхней станции 1 к Ь|Жней станции 6. В случае необходимости снижения скорости движения вагона при проходе опоры 4 и в период остановки возле нижней станции 6 оператор изм.- няет режим работы привода. Движение вагона 7 от нижней станции 6 в сторону верхней станции 1 происходит аналогично. Если нарушается нормальный режим движения вагона, пуск или остановка производится там, где это окажется нужным. Такие ситуации создаются как в нормальных, так я в аварийныхрежимах. В момент прохода вагоном опоры 4 при изменении натяжения между хвосто вой и головной ветвями тягового каната 3 возможна раскачка тягового ка ната 3 в пролете между верхней стан452цией 1 и опорой 4, когда вагон движется по направлению к нижней станции 6, или между опорой 4 и нижней станцией 6, когда вагон 7 движется в направлении верхней станции 1. Возникающая раскачка может вызвать захлестывание канатов 3 и 2. Причиной этого являются сложные волновые процессы, протекающие в канате 3. В момент прохода опор 4 вагоном 7 тяговое усилие F переходит от хвостовой в головную ветвь тягового каната 3. Воемя t изменения F-определяет скорос-т-ь движения вагона 7 на опорном башмаке 5. Дпительность переходного процесса нарастания подъемного усилия каната 3 определяет t. Так как при изменении F хвостовая ветвь тягового каната 3 поднимается и приближается к несущем/ канату 2 головная ветвь опускается, и д. захлестывания канатов 2 и 3 опасность представляет хвостовая ветвь. Цдя каната 3 как колебательного , звена с распределенными параметрами характерны волновые процессы. Колебания, возникающие в результате управлянщего воздействия, устраняются с помощью привода, а колебания, возник:1ющие в результате воздействия возмутг.ечием не устраняются. Ввиду большой длины каната 3 между опорами пос01едний становится чувствительным к Бозб /ждению поперечных колебаний. Чаfr -i a колебаний зависит от скорости нарастания воздействия. При скачке тягового усипия F, что соответствует характеру протекания процесса при прохождении вагоном 7 опор 4 без снижения скорости, подъемная сила не успевает распространиться по всей длине каната 3. Подъем ее происходит по отдельным участкам воздействия бегущей волны повышенной частоты колебания. Перемещаясь вдоль каната 3, бегущая волна в ряде случаев суммируется с отраженной волной или волной существующего колебания, которую имел канат 3 до прохода опор 4 вагоном 7, в результате чего амплитуда колебаний на отдельных участках растет, и дальнейшее протекание процесса носит неопределенный характер. Степень демпфирования этого вида колебания зависит от величин диссипативныхсил и возможности отдачи энергии другим звеньям колебательной системы. Несмотря на то, что колебания в тяговом канате 3 возбуждаются в результате перераспределения управляющего воздействия между ветвями канат 3 в процессе прохода опор 4 вагоном 7 демпфирование с помощью привода полностью не решает задачу, тгк как для захлестывания канатов иногда достаточна первая волна колебаний. При уменьшении скорости нарастани F путем снижения скорости движения вагона 7 на опорном бащмаке 5 подъем ная сила успевает распространиться по длине каната и ее переход в друго столожение происходит постепенно без 1чарушения формы навески. Однако тако способ предотвращения возникновения дополнительных колебаний снижает про изводительность и осложняет управление . Исключение возможности захлестыва ния канатов 2 и 3 при движении вагон на опорном башмаке 5 без снижения скорости достигается в том случае, когда выполняется общеизвестное уело вие, применяемое в теории автоматизированного электропривода по оптимизации управления, согласно котором общее время t нарастания F не должн быть меньше четверти периода Т собствекной частоты первой гармоники колебания каната 3. Когда указанное условие не соблюдается при t Т/А в колебательных звР.ньях (в канате 3) в переходных ре жи1;ах возбуждаются колебания, при t Т/4 процесс носит апериодический характер. Связь между временем прохождения вагона 7 через башмак 5 опоры 4 и периодом собственной частоты хвостового каната 3 является общим критерием для всех канатных дорог независимо от их конфигурации и параметров элементов электромеханической системы, с помощью которого возможно выбрать оптимальный вариант устранения дополнительных колебаний в канате 3 при проходе опор 4 вагоном 7. Время t с параметрами элементов дороги связано простым соотношением t 1/V, где 1 - длина опорного башмака 5, Mj V - скорость движения вагона 7 на опорном башмаке 5, м/с, Период собственной частоты тягового каната 3 через параметры элемен--тов привода вьфажается соотношением Т 0,634 L/nfiTTg, где L - длина каната 3 одного, пролета, м,п 1,2,3 - коэффициент, учитывающий гармонический состав колебания;Н - натяжение хвостового каната 3 в момент, когда вагон 7 подходит к опорному башмаку 5, кг; g - масса погонного метра тягового каната 3, кг/м. Так как для Т определяют первую гармонику, то п 1. Расчетное соотношение принимает вид Т 0,634 L /H77g. Рассчитывают t и Т, Полученные результаты сравнивают и,если имеет место неравенство t Т/4, то увеличивают натяжение каната 3 добавлением натяжного груза или натягом пружины натяжного устройства. F(t) нарастает по экспоненциальному закону с постоянным временем. . Экспоненциальный характер изменения F(t) обеспечивает профиль опорного башмака. С учетом того, что переходный процесс t кончается через (3-4) L, при соблюдении заданного условия канат 3 без колебания занимает новое положение.
}(-Mf.4:f:
I I
X.
PuS.Z
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2003 |
|
RU2248285C2 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2000 |
|
RU2184665C2 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2000 |
|
RU2184666C2 |
| Устройство и способ доставки грузов | 2019 |
|
RU2735796C1 |
| Подвесная канатная дорога маятникового типа | 1983 |
|
SU1096144A2 |
| Подвесная канатная дорога маятникового типа | 1982 |
|
SU1165604A1 |
| Электропривод подвесной канатной дороги | 1974 |
|
SU499160A1 |
| ГОРОДСКАЯ КАНАТНАЯ ДОРОГА | 2011 |
|
RU2466889C1 |
| ГРУЗОПАССАЖИРСКИЙ КАНАТНО-ПЕРЕПРАВОЧНЫЙ КОМПЛЕКС | 2011 |
|
RU2478503C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СОСУДОВ ПОДВЕСНОЙ КАНАТНОЙ ДОРОГИ | 1969 |
|
SU238582A1 |

СПОСОБ ГАШЕНИЯ КОЛЕБАНИЙ ТЯ ГОВОГО КАНАТА КАНАТНОЙ ДОРОГИ, заклю чающийся в том, что определяют вели.чину амплитуды колебания вагона, после чего регулируют посредством привода скорость тягового каната, отличающийся тем, что, с целью повьшения безопасности движения вагона путем устранения возможности захлестывания каната в момент прохода вагона через башмак опоры, определяют иг. 1 период собственной частоты колебаний тягового каната по формуле ПГ Т 0,634 U-Si- , где Т - период собственной частоты колебания тягового вагона; L - длина каната одного пролетаJ Н, - натяжение тягового каната в пролете; g - масса погонного метра тягового каната, после чего сравнивают этот период с временем движения вагона через башмак опоры, которое определяют по формуле t 1/V, где С - время прохождения вагона через башмак опоры, 1 - длина башмака опоры; V - скорость движения вагона, и выдерживают равенство Т .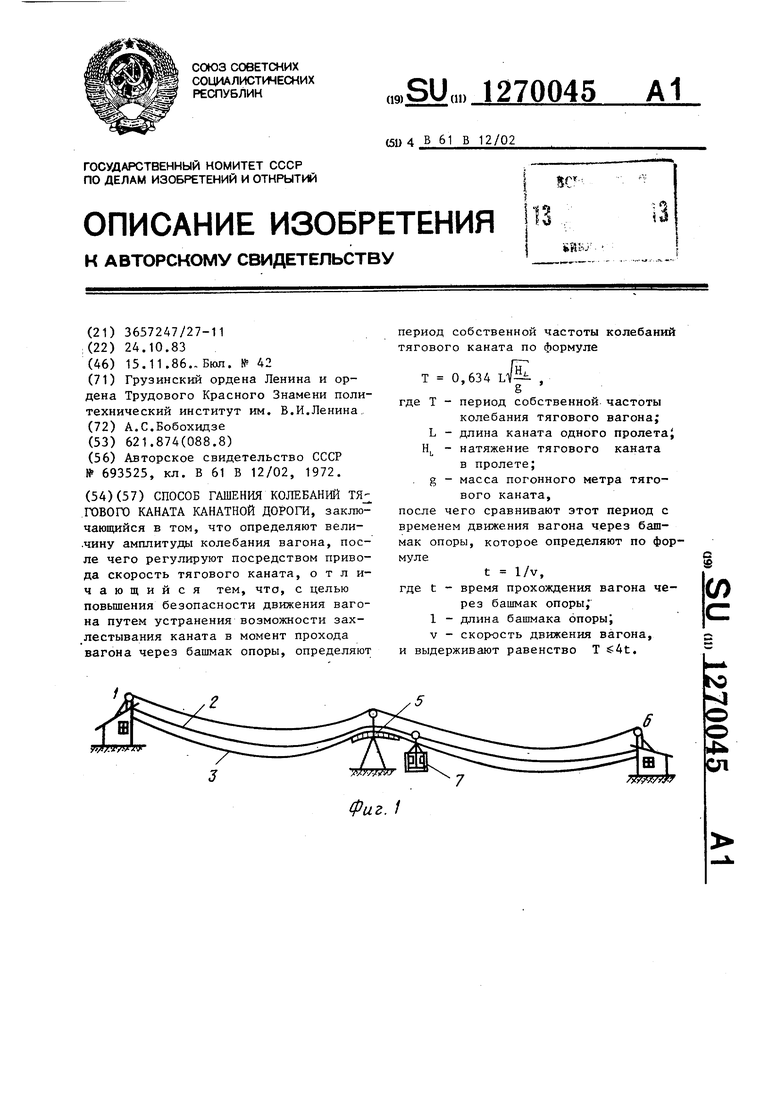
| Способ демпфирования колебаний в элетроприводе и устройство для его осуществления | 1977 |
|
SU693525A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
