ff цепь ynpaSл нил ул. fffuzam. mjaaffcnoflmsflaiH
05
ел
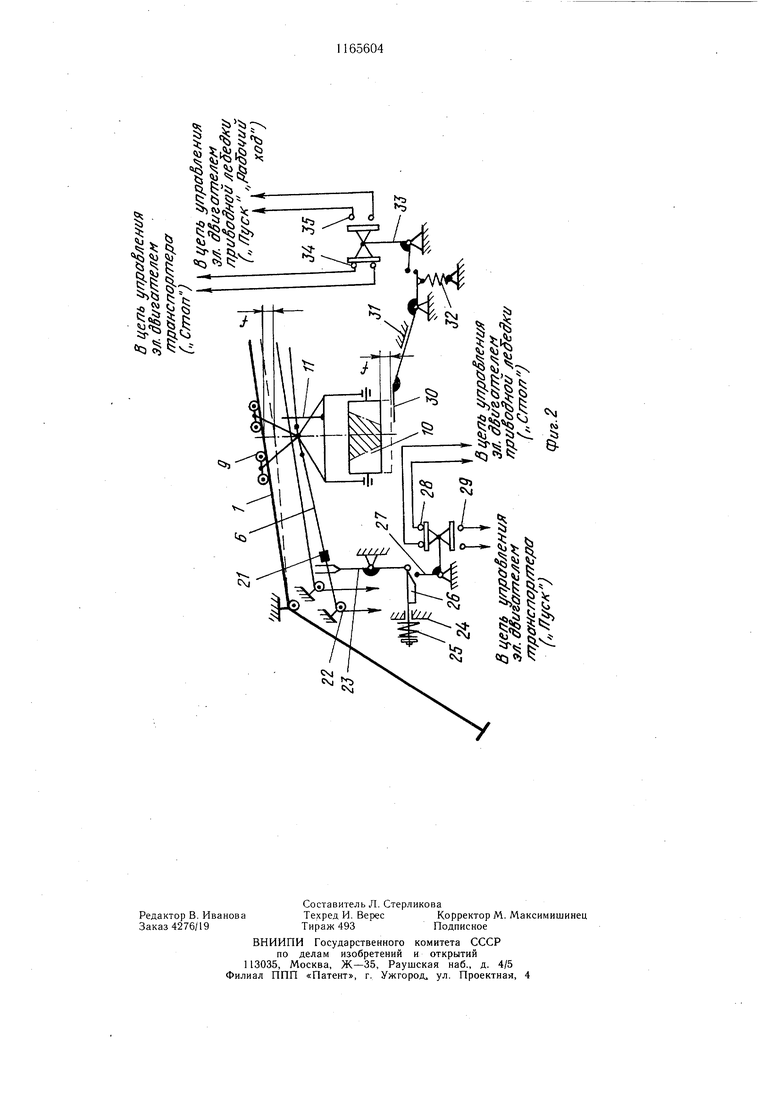
05 У // f г Изобретение относится к области транспортных средств и может быть применено для механизации транспортно-складских работ на базе канатной дороги в сельском хозяйстве, строительстве, промышленности и других отраслях народного хозяйства. Цель изобретения - обеспечение работы канатной дороги в автоматическом режиме. На фиг. схематично показана подвесная канатная дорога маятникового типа; на фиг. 2 - узел управления остановкой тележки под загрузку и процессом загрузки. Канатная дорога (фиг. 1) содержит несущий канат 1 (натяжное устройство не показано), навешенный на башмаки головной 2, тыловой 3 и промежуточной 4 опор, упор-разгружатель 5, закрепляемый на несущем канате 1 в месте разгрузки, замкнутый в кольцо тяговый канат 6 и приводимый в движение канатоведущим шкивом 7 тяговой электролебедки 8, и грузовую тележку 9 с ковшом 10 опрокидного типа. Грузовая тележка 9 снабжена фиксатором пружинного типа, предохраняющим тележку 9 от спадания с несущего каната 1 и обеспечивающим беспрепятственный проход тележки 9 через башмак промежуточной опоры 4, и известным рычажным механизмом, расфиксирующим ковш 10 при кон такте рычага 11 тележки 9 с упором-разгружателем 5 во время разгрузки ковша 10. Тяговый канат 6 обводится через канатоведущий щкив 7 тяговой лебедки 8, обводные блоки всех опор натяжного устройства 12 и ограничителя 13 грузового хода и крепится концами к тележке 9, замыкаясь на ней в кольцо. Привод канатоведущего щкива 7 лебедки 8 осуществляется от синхронного электродвигателя при помощи реверсивного магнитного пускателя (не показан). На головной опоре 2 смонтированы и включены в систему тягового каната 6 его натяжное устройство 12 и ограничитель 13 грузового хода тележки 9: Ограничитель 13грузового хода состоит из системы подвижного и неподвижного блоков, огибаемых тяговым канатом 6, штока с поводком 14и регулируемой на заданное усилие пружины 15, двухполюсного конечного выключателя 16, нормально замкнутые контакты 17 которого включены в цепь управления электродвигателя «грузовой ход лебедки 8, а нормально разомкнутые контакты 18 подключены к реле 19 времени, обеспечивающего включение электродвигателя лебедки 8 на порожний ход через заданный промежуток времени после срабатывания конечного выключателя 16, т.е. после разгрузки ковша 10. На головной опоре 2 смонтирован также и узел 20 управления остановкой тележ ки 9 под загрузку и процессом загрузки ковша 10, а на тяговом канате 6 у тележки 9 со стороны головной опоры 2 смонтирован передвижной упор 21, обеспечивающий возможность точной регулировки расстояния между головной опорой 2 и местом загрузки ковша 10, причем после регулировки расстояния упор 21 должен закрепляться на канате 6 неподвижно. Узел 20 управления (фиг. 2) в свою очередь состоит из ограничителя холостого хода тележки 9, закрепленного на головной опоре 2 в зоне входа тягового каната 6 на обводной блок 22 и специального механизма прекращения загрузки ковша. Ограничитель холостого хода тележки 9 состоит из двуплечего рычага 23, снабженного вилкой, в которой проходит тяговый канат, взаимодействующий с упором 21 при подходе тележки 9 под погрузку, второе плечо рычага 23 шарнирно соединено со штоком 24, удерживаемого пружиной 25 в заданном положении и снабженного встречей 26, с которой контактирует рычаг двухполюсного конечного выключателя 27, нормально замкнутые контакты 28 которого включены в цепь управления электродвигателя «порожний ход лебедки 8, а нормально, разомкнутые контакты 29 включены в цепь управления электродвигателем погрузочного транспортера (не показан). Специальный рычажный механизм прекращения погрузки ковша состоит из двуплечего рычага 30 специальной формы, з акрепленного в зоне погрузки около головной опоры 2 и удерживаемого в исходном положении с помощью упора 31 и пружины 32, закрепленной за малое плечо рычага, которое снабжено встречей, контактирующей в процессе взаимодействия с двухполюсньш конечным выключателем 33. Большое плечо двуплечего рычага 3 взаимодействует с ковщом 10 при его опускании во время загрузки из-за прогиба несуш.его каната 6 при его загрузке, нормально замкнутые контакты 34 конечного выключателя 33 включены в цепь управления электродвигателя погрузочного транспортера, а нормально разомкнутые контакты 35 включены в цепь управления электродвигателя «рабочий ход лебедки 8. Работа подвесной канатной дороги маятникового типа осуществляется следующим образом. При подходе порожней тележки 9 с ковшом 10 к головной опоре 2 к месту загрузки упор 21 тягового каната 6 взаимодействует с вилкой двуплечего рычага 23 и отклоняет его от нормального положения в сторону движения тягового каната 6, при этом перемешение вилки двуплечего рычага 23 через шарнир передается штоку 24, пружина 25 сжимается, а встреча 2б получает линейное перемещение и при своем движении поворачивает рычаг конечного выключателя 27 и, размыкая контакты 28, обесточивает катушку магнитного пускателя «порожний ход, отключая тем самым электродвигатель тяговой лебедки 8 от сети. Одновременно при срабатывании конечного выключателя 27 происходит замыкание контактов 29 конечного выключателя 27, т.е. происходит включение магнитного пускателя электродвигателя погрузочного транспортера и его пуск в работу. При работе погрузочного транспортера происходит загрузка ковша 10 грузом. По мере загрузки ковша 10 происходит его опускание, происходит это потому, что увеличение веса груза в ковше 10 передается через тележку 9 на несущий канат 1 и увеличивает поперечную нагрузку на него, а между поперечной нагрузкой на несущий Канат 1 и величиной его прогиба I под этой нагрузкой существует пропорциональная зависимость. При достижении загрузки ковша 10 номинальным весом несущий канат 1 под тележкой 9 прогибается и на эту же величину прогиба f опускается и ковш 10, который, нажимая на большое плечо рычага 30 и преодолевая сопротивление пружины 32, перемещает малое плечо. При этом конечный выключатель 33 срабатывает и, размыкая контакты 34 цепи управления, обесточивает катушку магнитного пускателя и отключает от сети электродвигатель погрузочного транспортера. Одновременно при срабатывании конечного выключателя 33 срабатывают и нормально разомкнутые контакты 35 цепи управления электродвигат&ля лебедки 8 и включают его на «рабочий ход. При этом вращающийся канатоведущий щкив 7 лебедки 8 передает свое движение тяговому канату 6 и грузовая тележка 9 с ковщом 10 перемещается по несущему канату 1 к месту разгрузки. При достижении груженой тележкой 9 упора-разгружателя 5 рычаг 11 тележки 9 взаимодействует с последним и через рычажную систему расфиксирует ковш 10, который под действием
груза опрокидывается и разгружается.
При дальнейщем вращении канатоведущего шкива 7 в набегающей ветви тягового каната 6 возникает усилие, превыщающее номинальное (например на 10-15%), которое сжимает пружину 15 ограничителя 13
ностью в автоматическом режиме и снизить стоимость транспортиров,ки грузов путем уменьшения эксплуатационных расходов, так как автоматический режим работы канатной дороги дает возможность обходиться без оператора. грузового хода и шток с поводком 14 получает линейное перемещение, при этом поводок 14 при своем движении поворачивает рычаг конечного выключателя 16 и, размыкая контакты 17 цепи управления, обесточивает катушку магнитного пускателя «грузовой ход и отключает от сети электродвигатель лебедки 8. Одновременно при срабатывании конечного выключателя 16 нормально разомкнутые контакты 18 замыкаются и включают реле 19 времени, которое через определенный интервал времени (например 10-20 с), необходимый для затухания колебаний несущего каната 1 и грузовой тележки 9 после разгрузки, включает электродвигатель на порожний ход. Вращающийся в обратном (порожнем) направлении канатоведущий щкив 7 перемеш,ает через тяговый канат 6 грузовую тележку 9 с ковшом 10 к месту загрузки. т.е. к головной опоре 2. При подходе к головной опоре 2 упор 21 тягового каната 6 взаимодействует с вилкой двуплечего рычага 23 ограничителя холостого хода тележки 9 и, сжимая пружину 5, перемещает щток 24 со встречей 26, которая, взаимодействуя с конечным выключателем 27, поворачивает его рычаг и размыкает нормально замкнутые контакты 28, обесточивая катущку магнитного пускателя и отключая тем самым электродвигатель от лебедки 8 сети. При этом одновременно при срабатывании конечного выключателя 27 нормально разомкнутые контакты 29 замыкаются и включают в работу электродвигатель погрузочного транспортера для новой загрузки ковша. Таким образом, рабочий цикл канатной дорбги в автоматическом режиме замыкается и начинается следующий рабочий цикл. Предлагаемая конструкция подвесной канатной дороги маятникового типа позво яет эксплуатировать канатную дорогу пол5$Ч««§ |t|| 1
&
IH s tyV
llb
l-i
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесная канатная дорога маятникового типа | 1983 |
|
SU1096144A2 |
| Подвесная канатная дорога маятникового типа | 1978 |
|
SU749716A1 |
| Подвесная канатная дорога маятникового типа | 1984 |
|
SU1220984A2 |
| Подвесная канатная дорога маятникового типа | 1979 |
|
SU927603A1 |
| Подвесная канатная дорога | 1981 |
|
SU1022843A1 |
| Подвесная канатная дорога маятникового типа | 1983 |
|
SU1110693A2 |
| Сдвоенный кабельный кран | 1982 |
|
SU1057403A2 |
| ПОГРУЗОЧНЫЙ ЭКСКАВАТОР-ДРАГЛАЙН | 1994 |
|
RU2079609C1 |
| Канатная трелевочная установка | 1975 |
|
SU540757A2 |
| Сдвоенный кабельный кран | 1978 |
|
SU765194A2 |
ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА МАЯТНИКОВОГО ТИПА, содержащая головную, тыловую и промежуточные опоры, на которых подвешен несущий канат с упором-разгружателем и грузовой тележкой, выполненной с ковщом, тяговый канат. приводимый в движение канатоведущим щкивом тяговой электролебедки, при этом на головной опоре расположены ограничители холостого и грузового ходов тележки, выполненные с конечными выключателями, отличающаяся тем, что, с целью обеспечения работы канатной дороги в автоматическом режиме, она снабжена двуплечим рычагом, расположенным около головной опоры, причем один конец этого рычага выполнен взаимодействующим с ковшом тележки, а другой конец - с тяговой электролебедкой, которая снабжена цепью нормально разомкнутых контактов, и упором, размещенным на тяговом канате и взаимодействуюшим с ограничителем холостого хода тележки. В
| Подвесная канатная дорога маятникового типа | 1978 |
|
SU749716A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
