Известны захваты для штучных грузов П-образной формы, выполненные в виде двух зажимных рам, раздвижных при помощи гидравлических толкателей, питаемых от насосной, установки. Однако такие захваты при работе с грузоподъемными кранами не сохраняют горизонтального положения захватываемого груза независимо от его размеров и положения центра тяжести, а также не обеспечивают безопасность работ.
В описываемом устройстве эти недостатки устранены тем, чго для сохранения горизонтального положения захватываемого груза захват выполнен с охватывающей его и соединенной спим рычажной системой тразерсой, подвещенной к «рюку крана с помощью наклонной подвески, а также со вспомогательным гидравлическим толкателем, управляющим взаимным положением траверсы и подвески. Для автоматизации управления взаимным .положением подвески и траверсы размещенный «а траверсе ртутный уровнемер-выключатель, при наклонном положении которого включается электропривод насосной установки, питающей вспомогательный тидравлический толкатель, чем обеспечивается равновесие захвата независимо от размеров груза и положения центра тяжести. Чтобы обеспечить безопасность работ при перемещении груза краном, зажимные рамы выполнены поворотными в вертикальной плоскости на 90° с помощью гидравлических толкателей и системы рычагов.
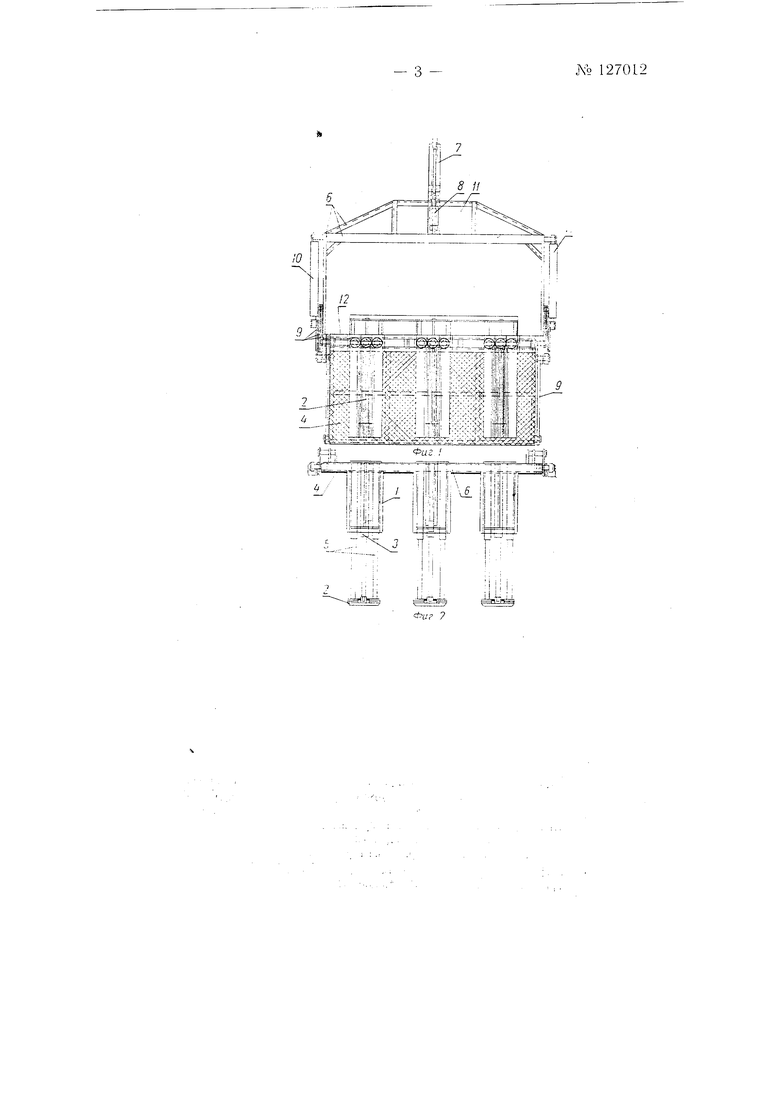
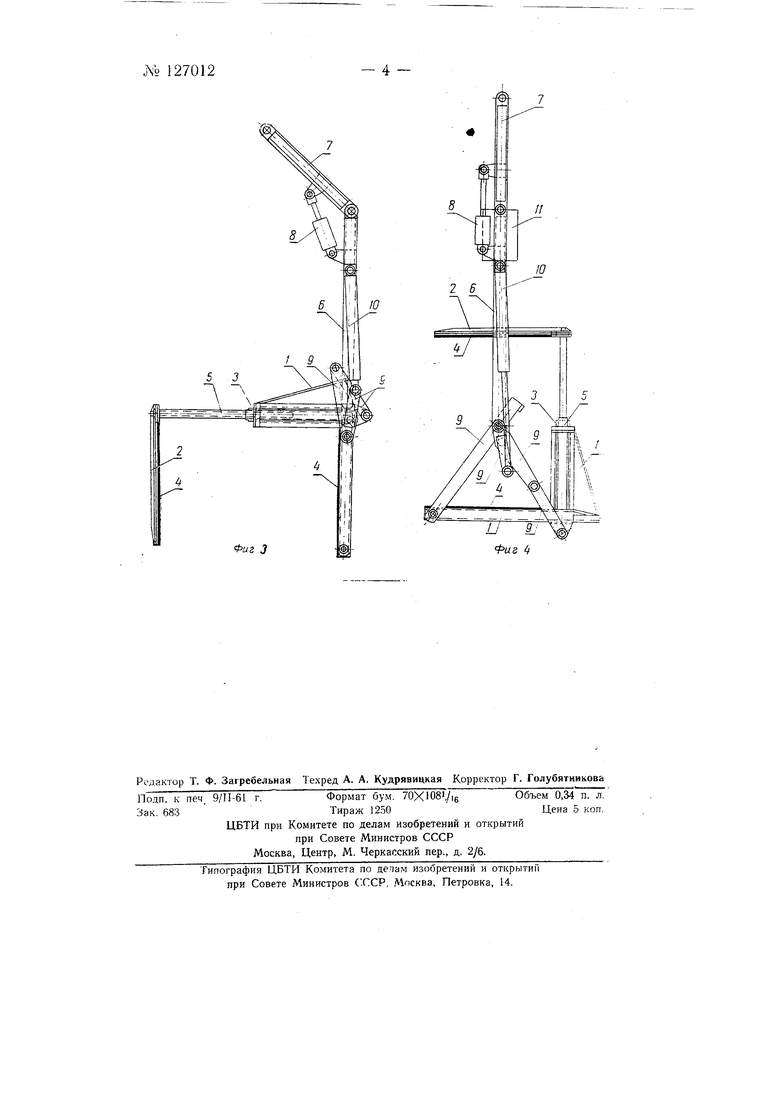
На фиг. 1 изображен захват для щтучных грузов; на фи-г. 2 -то же, вид сверху; на фит. 3 - то же, вид сбоку; на фиг. 4 - захват з транспортном положении.
Захват состоит из двух зажимных рам 1 w 2, раздвижных при помощи гидравлических толкателей 5, питаемых от насосной установки (на чертеже не показана). Рамы / и 2 облицованы резиновыми накМ 127012
.чадаами 4. Направляющими для перемещения рамы 2 относительно )аш)1 7 с 1т юд§скопичёские трубы 5.
Зах11а1 ва ьШется траверсой 6, нодвешиваемой к крюку крана прИ; П(ЭМ(|Ы ||| | лощйр|5 подвески 7 со вспомогательным тидразличеоким толкателель .1уцравляющим взаимным положением траверсы и подвески. .Траверса 6 связана с захватом системой рачагов 9 и гидравлическими толкателями W, при помощи которых захват может быть приведен в транспортное положение (фиг. 4). Для автоматического подд-ержания горизонтальиого положения траверсы при транспортном положении захвата с грузом, независимо от размеров и положения центра тяжести груза, путем управления взаимным положением подвески 7 и траверсы 6 применен размещенный «а траверсе ртутный уровнемервыключатель {на чертеже не показан). При наклонном положении уровнемера включается электропривод насосной установки, питающей гидравлический толкатель 5. Электронасооная установка размещена к кожухе и на траверсе 6. Подвод напряжения осуществлен кабелем. Положение зажимных рам / и 2 регулируется по ширине путем перемещения крайних гидравлических толкателей 3 и телескопических труб 5 по направляющим щвеллерам 12 обвязки рамы /.
Описываемый захват обеспечивает поворот пакета грузов после зяжатия на 90° и дальнейщее безопасное перемещение его в этом положении.
Возможно также кноггочно-дистанционное управление захватом.
П р е д м е т и з о б р е т е и и я
1. Захват для щтучных грузов П-образной формы, вьшолненный в виде двух зажимных рам, раздвижных при помощи гидравлических толкателей, питаемых от насосной установки, отличающийся тем, что, с целью использования его с грузоподъемным краном с сохранением при этом горизонтального положения захватываемого груза независимо от его размеров и положения центра тяж-ести, он выполнен с охватывающей его и соединенной с ним рычажной си1стемой траверсой, подвещсиной к крюку крана с помощью наклонной подвески, а также со вспомогательным гидравлическим толкатетем, управляющим взаимным положением траверсы и яодвески.
2.Форма выполнения захвата по п. 1, отличающаяся тем, что для автоматизации управления взаимным положением подвески и траверсы применен размещенный на траверсе ртутный уровиемер-выключатель, при наклонном положении которого включается электропривод насосной установки, питающей . вспомогательный гидравлический толкатель, чем обеспечивается равновесие захвата независимо от размеров Груза и положения центра тяжести.
3.Форма выполнения захвата по пп. 1 и 2, отличающаяся тем, что, с целью обеспечения безопасной работы при -перемещении груза краном, зажимные рамы выполнены поворотными в вертикальной плоскости на 90° с помощью гидравлических толкателей и системы рычагов.
Фиг 3
Фиг fi
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выравнивания торцов бревен | 1959 |
|
SU128793A1 |
| Захват двухканатного типа для штучных грузов | 1960 |
|
SU136871A1 |
| Балансирная траверса | 1981 |
|
SU977360A1 |
| Захват Панькова для штучных грузов | 1981 |
|
SU1020352A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1996 |
|
RU2106246C1 |
| Установка для погружения строительных элементов | 1979 |
|
SU896182A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ ОТЛИВОК ПО ГАЗИФИЦИРУЕМЫМ МОДЕЛЯМ | 1986 |
|
SU1438090A1 |
| Захватное устройство для подъема и загрузки контейнеров | 1949 |
|
SU86604A1 |
| Многофункциональная малогабаритная машина повышенной проходимости "Машина Карасева" | 2024 |
|
RU2839666C1 |
| СПРЕДЕР НАКЛОННЫЙ ДЛЯ КОНТЕЙНЕРОВ | 2017 |
|
RU2667206C1 |