Изобретение относится к подъемно-аранс портному оборудованию, в частности к захватам для штучных грузов.
Известен захват для штучных грузов, преимущественно блоков, содержащий раму, жестко закрепленный на ней вертикальный рычаг и шарнирно установленный на ней неуравновешенный захватный рычаг, одно плечо которого имеет приспособление для навески на крюк грузоподъемной щины, а второе выполнено с. упором для взаимодействия с боковой поверхностью груза 1.
Однако известный захват недостаточно удобен в эксплуатации, так как он не может зацепить блок, если не будет отодвинут от уступа или от рядом расположенных блоков.
Цель изобретения - повыи1ение удобства эксплуатации.
Поставленная цель достигается тем, что для захвата штучных груз ов, преимущественно блоков, содержащий раму, жестко закрепленный на ней вертикальный рычаг и щарнирно установленный на ней неуравновешенный захватный рычаг, одно плечо которого имеет приспособление для навески на крюк грузоподъемной машины, а второе выполнено с упором для взаимодействия с боковой поверхностью груза, снабжен зацепами, жестко закрепленными на раме и выполненными в виде крюков, и щарнирно прикрепленными вершинами углов к раме угловыми рычагами со смещенными центрами тяжести, верхние плечи которых выполнены в ви де крюков, причем приспособление для навески на крюк грузоподъемной машины выполнено в виде охватывающей верхнее плечо захватного рычага подвески с консольно закрепленными в нижней ее части осями для поочередного взаимодействия с зацепами и нижними плечами угловых рычагов, а верхнее плечо захватного рычага снабжено консольно закрепленными на его вершине осями для взаимодействия с крюками верхних плеч угловых рычагов и выполнено в виде крюка для взаимодействия с упомянутой подвеской.
Такое выполнение захвата позволяет захватывать блоки независимо от того, расположены ли рядом другие блоки или нет, что повыщает удобство его эксплуатации.
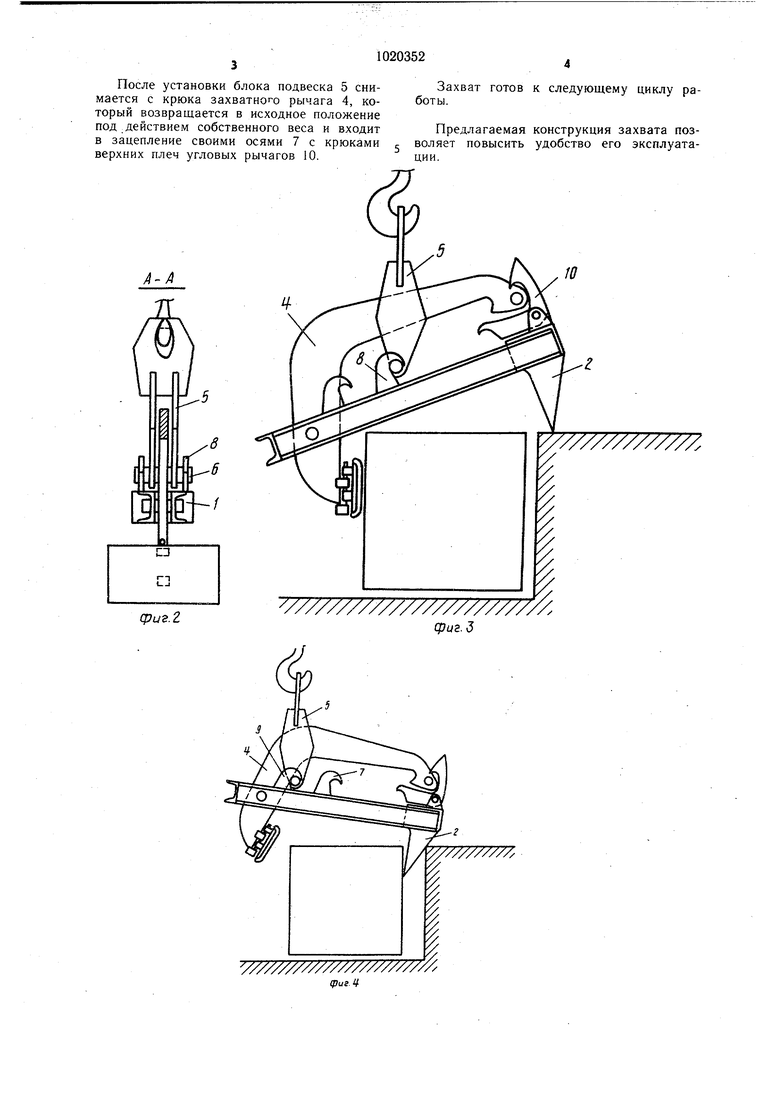
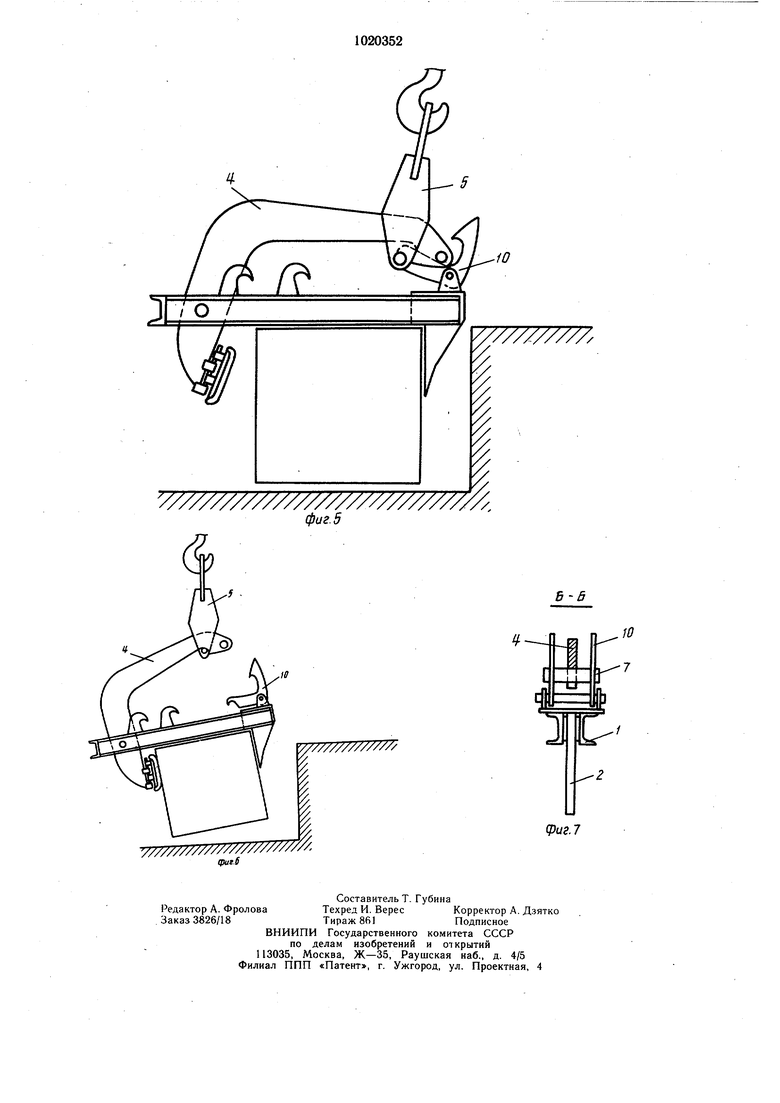
На фиг. 1 изображен захват в раскрытом положении, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 и 4 - захват в момент отодвигания блока от рядом расположенных блоков; на фиг; 5 - захват в момент установки его на блоки; на фиг. 6 - то же, в момент захвата блока; на фиг. 7 - разрез Б-Б на фиг. 1.
Захват для щтучных грузов содержит раму 1, жестко закрепленный на ней вертикальный рычаг 2, имеющий клинообразную форму, и шарнирно закрепленный на
ней посредством оси 3 неуравновещенный захватный рычаг 4, одно плечо которого выполнено с упором для взаимодействия с боковой поверхностью блока, а другое имеет приспособление для навески на крюк грузоподъемной машины, которое выполнено в виде охватывающей верхнее плечо захватного рычага 4 подвески 5, выполненной в виде обоймы с консольно закрепленными в нижней ее части осями 6. Верхнее плечо захваткого рычага 4 выполнено в виде крюка для взаимодействия с подвеской 5, и на его вершине консольно закреплены оси 7. На раме 1 захвата жестко закреплены зацепы 8 и 9, выполненные в виде крюков, и щарнирно прикреплены вершинами углов угловые рычаги Юсо смещенными центрами тяжести, верхние плечи которых выполнены в виде крюков.
Захват для щтучных грузов работает следующим образом.
Захват для щтучных грузов при зацеплении блока, установленный с небольшим зазором с рядом расположенными блоками, опускается нижним рычагом на уступ (или на соседний блок) до упора рамы о ребро 5 захватываемого блока (фиг. 3). Затем подвески 5 манипулированием стрелой грузоподъемной машины (крана) снимается с зацепов 8, расположенных по центру тяжести захвата, и вводится в зацепы 9.
Затем захват стаскивается краном в сто0 рону зазора между блоком и уступом до тех пор, пока конец вертикального рычага 2 не провалится в этот зазор.
После этого крановщик создает вертикальное перемещение крюковой подвеске 5 таким образом, чтобы вертикальный рьТчаг 5 2 клиновидными поверхностями отжал плиту от уступа (фиг. 4). После того, как вертикальный рычаг 2 полностью провалится в зазор между блоком и уступом, подвеска 5 снимается с зацепов 9.
Затем подвеска 5 подводится под нижние плечи угловых рычагов и, поднимаясь, поворачивает угловые рычаги 10, верхние плечи которых выполнены в виде крюков, освобождая удерживаемые этими крюками оси 7 захватных рычагов 4 и, таким образом, сами рычаги от фиксации их в раскрытом положении. Одновременно подвеска 5 входит в зацепление с верхним плечом захватного рычага 4, выполненным в виде крюка. При дальнейшем подъеме подвески происходит зацепление блока, который затем 0 переносится захватом в нужное место.
Исключение случайного зацепления захватного рычага 4 обеспечивается тем, что верхние плечи захватного рычага 4 с помощью осей 7 фиксируются крюками верх, них плечей угловых рычагов 10,, которые после захвата груза возвращаются в исходное положение за счет выполнения их со смещенными центрами тяжести.
После установки блока подвеска 5 снимается с крюка захватного рычага 4, который возвращается в исходное положение под действием собственного веса и входит в зацепление своими осями 7 с крюками верхних плеч угловых рычагов 10.
к следующему циклу раконструкция захвата позудобство его эксплуатафиг. 2
W
У/////////////7.
фуг. J
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват для штучных грузов | 1977 |
|
SU650946A1 |
| Захватное устройство для грузов с проушинами | 1990 |
|
SU1787925A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| Автоматический захват для штучных грузов | 1982 |
|
SU1062167A1 |
| Автоматический захват | 1981 |
|
SU1020350A1 |
| Грузозахватное устройство | 1990 |
|
SU1770252A1 |
| Захват для грузов с отбортовкой | 1990 |
|
SU1766820A1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| Грузозахватное устройство | 1985 |
|
SU1346561A1 |
| Захватное устройство | 1982 |
|
SU1054273A1 |
ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ, преимущественно блоков, содержащий раму, жестко закрепленный на ней вертикальный рычаг и шарнирно установленный на ней неуравновешенный захватный рычаг, одно плечо которого имеет приспособление для навески на крюк грузоподъемной машины, а другое выполнено с упором для взаимодействия с боковой поверхностью груза, отличающийся тем, что, с целью повышения удобства эксплуатации, он снабжен зацепами, жестко закрепленными на раме и выполненными в виде крюков, и шарнирно прикрепленными вершинами углов к раме угловыми рычагами со смещенными центрами тяжести, верхние плечи которых выполнены в виде крюков, причем приспособление для навески на крюк грузоподъемной машины выполнено в виде охватывающей верхнее плечо захватного рычага подвески с консольно закрепленными в нижней ее части осями для поочередного взаимодействия с зацепами и нижними плечами угловых рычагов, а верхнее плечо захватного рычага снабжено консольно закрепленными на его вершине осями для взаимодействия с крюками верхних плеч угловых рычагов и выi полнено в виде крюка для взаимодействия с упомянутой подвеской. О)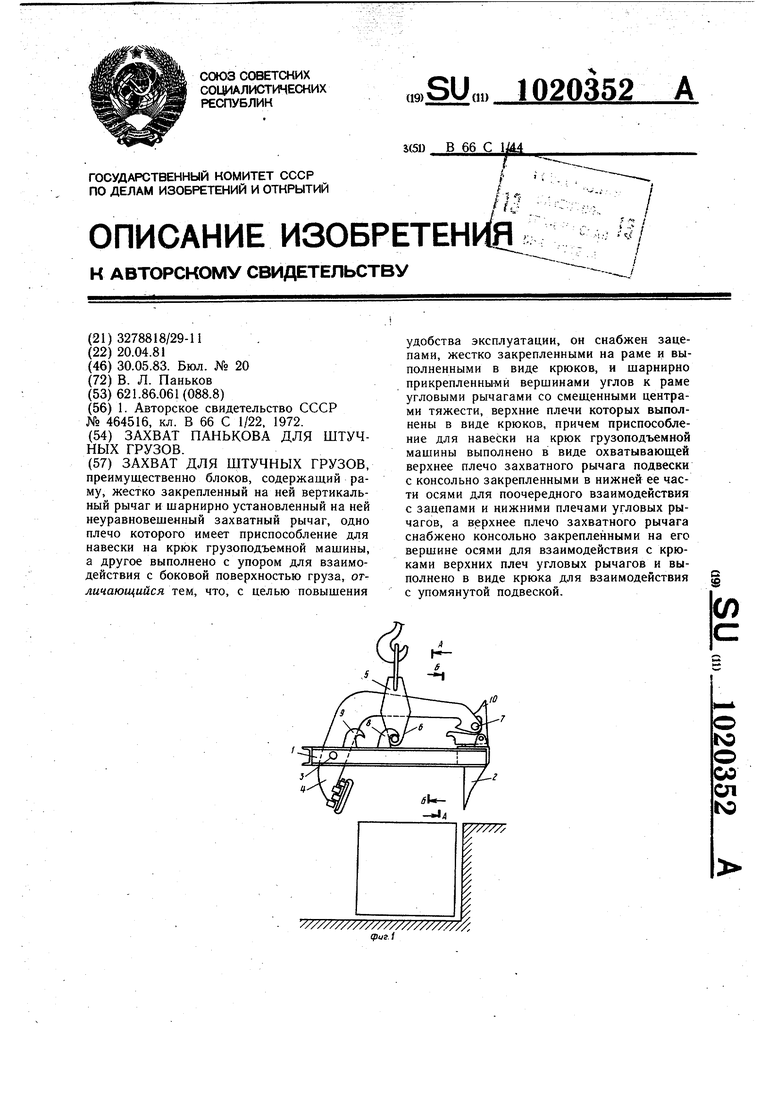
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захватное устройство для ящиков | 1972 |
|
SU464516A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
