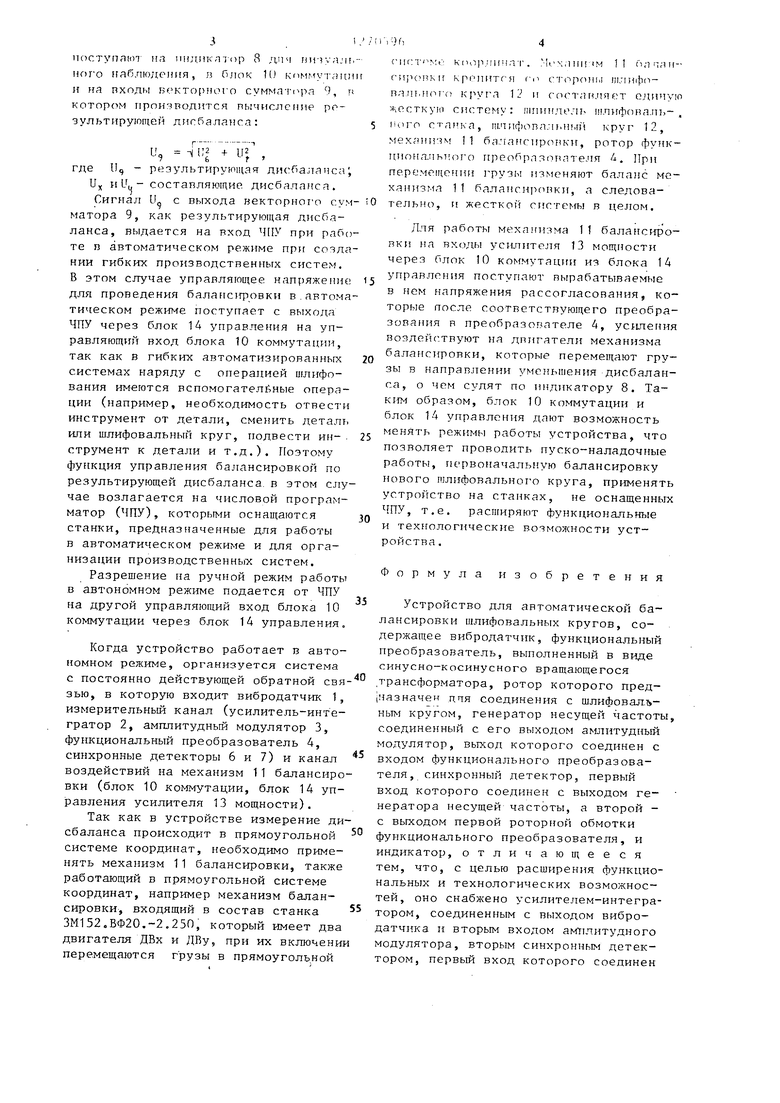
I 7 Изобретение oTFioriiTOi к ба;тл11с;нровочной технике н может пглгользонатт.ся для автоматической м ручной балансировки абразивного инструмента на шлифовальном станке. Цель изобретения - расширение функциональных и технологических возможностей за счет проведения наряду с измерением дисбаланса автоматической и ручной балансировки абра-зипного инструмента как иеред выполнением, так и в процессе операции шлифования а также использования устройства на станках с числовым программным управ лением. На фиг.1 изображена блок-схема устройства; на фиг.2 - сигналы на выходах блоков, входящих в состав устройства. Устройство для автомат гческой балансировки шлифовальных кругов содержит последовательно соединенные внбродатчш 1, усилитель-интегратор 2 и соединенный вторым входом амплитудны модулятор 3, функциональный преобразователь 4, выполненный в виде синус но-косикусмого вращающегося трансфор матора, статорная обмотка которого соединена с выходом амплитудного модулятора 3, генератор 5 несущей частоты, первый и второйсинхронные детекторы 6 и 7, первые входы которых соединены между собой, с выходом генератора 5 несущей частоты и входом амплитудного модулятора 3, а вторые соответственно с первой и второй роторными обмотками функционального преобразователя 4, индикатор 8, векторный сумматор 9 и блок 10 коммутации,, первые входы которых соединены с вьпсодом первого синхронного детектора 6, а вторые - с выходом второго синхронного детектора 7j механизм 11 балансировки, установленный на шлифовальном круге 12J связанном с ротором функционального преобразовател 4, уси.питель 13 моодюсти, соединенны с выходами блока 10 кo tмyтaции и вхо дами механизма 11 б-алансировки, и блок 14 управления, первый и второй выходы которого соединены соответственно с первым и вторым управляющими входами блока 10 коммутации, третий и четвертый - с третьим и четвертым входами последнего, а входы и выход векторного сумматора 9 предназна1чены для соединения с ЧПУ. ь2 .пан1иропаияы1 шлифонпл ьиы при нращегтии с углоппи частоой .л сопергаает синусоидал1.иые колеания, BocrtpiiHtrMaeMi.ie вибродатчиком, Пронорциональный дисбалансу сигнал , с его в.гхода поступает на вход силителя-интегратора 2, который расиряет динамический диапазон входных сигналов канала изменения (происходит значительный подъем ЛЧХ измерительного тракта на низких частотах с одновременным подавлением ее высокочас--тотной части), Сигнал U на выходе усилителя-интегратора 2 равен t и U sinnt dt |(-cos9t)4 о где Т - период колебаний Ur,, - амплитудное значение виброскорости;il - угловая частотаJ t - время. В амплитудном модуляторе 3 в результате амплитудной модуляции несущего сигнала частоты со сигналом U возникает модулрфованный сигнал j, который поступает на первичнудо обмотку функционального преобразователя 4. Поскольку коэффициент трансформации вращающегося трансформатора является синусной (косинусной) функцией угла поворота балансируемого ишифовального круга 12, вращающегося с угловой скоростью 52, в трансформаторе осуществляется умножение (вторичная амплитудная модуляция) сигнала U на синусно-косинусный параметрический сигнал с частотой вращения я ротора вращающегося трансформатора, В результате умножения в синусно-косинусном вращающемся трансформаторе на выходах вторичных обмоток выделяются сигналы: и(1) U cosn; и (II) U,sinn, которые сдвинуты относительно друг друга по фазе на 90. При этом амплитуды несущих сигналов пропорциональны величине сигнала дисбаланса и синусу (косинусу) его угла, т.е. являются полезными сигналами, несущими информацию о величине дисбаланса шлифовального круга. В синхронных детекторах 6 и 7 осуществляется детектирование сигналов и (I) и 11 (II) и подавление сигнала несущей частоты. Пропорциональные X и Y состав ляющим дисбаланса сигналы U и U с выходов синхронных детекторов 6 и 7 J1 поступлю на индикатор 8 дпч пичуа.К. HfUo наблюдения, в блок 10 кпммут-аци и на входы векторного cyNf faTopn 9, т котором проияводится пычислсние розультируюп сй дисбаланса: и, , где и,, - результирующая дисбаланса, и, иLL - состапляющие дисбаланса. Сигнал и с выхода векторного сумматора 9, как результирующая дисбаланса, выдается на вход при работе п автоматическом режиме при создании гибких производственных систем. В этом случае управляющее напряжение для проведения балар1С1фовки в . автоматическом режиме поступает с выхода ЧПУ через блок 14 управления на управляющий вход блока 10 коммутации, так как в гибких автоматизированных системах наряду с операцией шлифования имеются вспомогательные операции (например, необходимость отвести инструмент от детали, сменить детал11 или шлифовальный круг, подвести ий- . струмент к детали и т.д.). Поэтому функция управления балансировкой по результирующей дисбаланса, в этом случае возлагается на числовой программатор (ЧПУ), которыми оснащаются станки, предназначенные для работы в автоматическом режиме и для организации производственных систем. Разрешение на ручной режим работы в автономном режиме подается от ЧПУ на другой управляющий вход блока 10 коммутации через блок 14 управления. Когда устройство работает в автономном режиме, организуется система с постоянно действующей обратной связью, в которую входит вибродатчик 1, измерительный канал (усилитель-интегратор 2, амплитудный модулятор 3, функциональный преобразователь 4, синхронные детекторы 6 и 7) и канал воздействий на механизм 11 балансиро вки (блок 10 коммутации, блок 14 управления усилителя 13 мощности). Так как в устройстве измерение дисбаланса происходит в прямоугольной системе координат, необходимо применять механизм 11 балансировки, также работающий в прямоугольной системе координат, например механизм балансировки, входящий в состав станка ЗМ152.ВФ20.-2,250, который имеет два двигателя ДВх и ДВу, при их включении перемещаются грузы в прямоуголь.ной cll( K(m)i,iifH.Tr. Кхпипчм 11 оатянrHJU I Klt КрГПИТГЯ ГП СЧ трОН1.1 in.IMltlCiплльного круга 12 и гостаг(. единую жесткую систему: тпинле.н- шлифова.гть-. иого crainva, игляфоппльш.гй круг 12, механизм 1 6a.:iaFrcHpoFiKii, ротор функционапьиого преобразонателя 4. При перемещении грузы изменяют баланс мехаклзмя 11 балансировки, а следова7ельно, и жестко системы в целом. Для работы механизма 1 1 балаЕгсиро- вки на уснпителя 13 мощности через блок 10 коммутации из блока 14 управления поступают вырабатываемые в нем напряжения рассогласования, которые после соответствующего преобразования в преобразователе 4, усгшения воздействуют tm двигатели механизма балансировки, которые перемещают грузы в направлении уменьшения дисбаланса, о чем судят по индикатору 8. ТаК1ГМ образом, блок 10 коммутации и блок 14 управления дают возможность менять режимы работы устройства, что позволяет проводить пуско-наладочные работы, первоначальную балансировку нового галифовального круга, применять устройство на станках, не оснащенных ЧПУ, т.е. расширяют функциональные и технологические возможности уст- pofjcTBa. Формула изобретения Устройство для автоматической балансировки шлифовальных кругов, содержащее вибродатчик, функциональный преобразователь, выполненный в виде синусно-косинусного вращающегося .трансформатора, ротор которого пред(Г1азначен дня соединения с шлифовал.ным кругом, генератор несущей частоты, соединенный с его выходом амлитудный модулятор, выход которого соединен с входом функционального преобразователя, синхронный детектор, первый вход которого соединен с выходом генератора несущей частоты, а второй - с выходом первой роторной обмотки функционального преобразователя, и индикатор, отличающееся тем, что, с целью расширения функциональных и технологических возможностей, оно снабн ено усилителем-интегратором, соединенным с выходом вибродатчика и вторым входом амплитудного модулятора, вторым синхронным детектором, первый вход которого соединен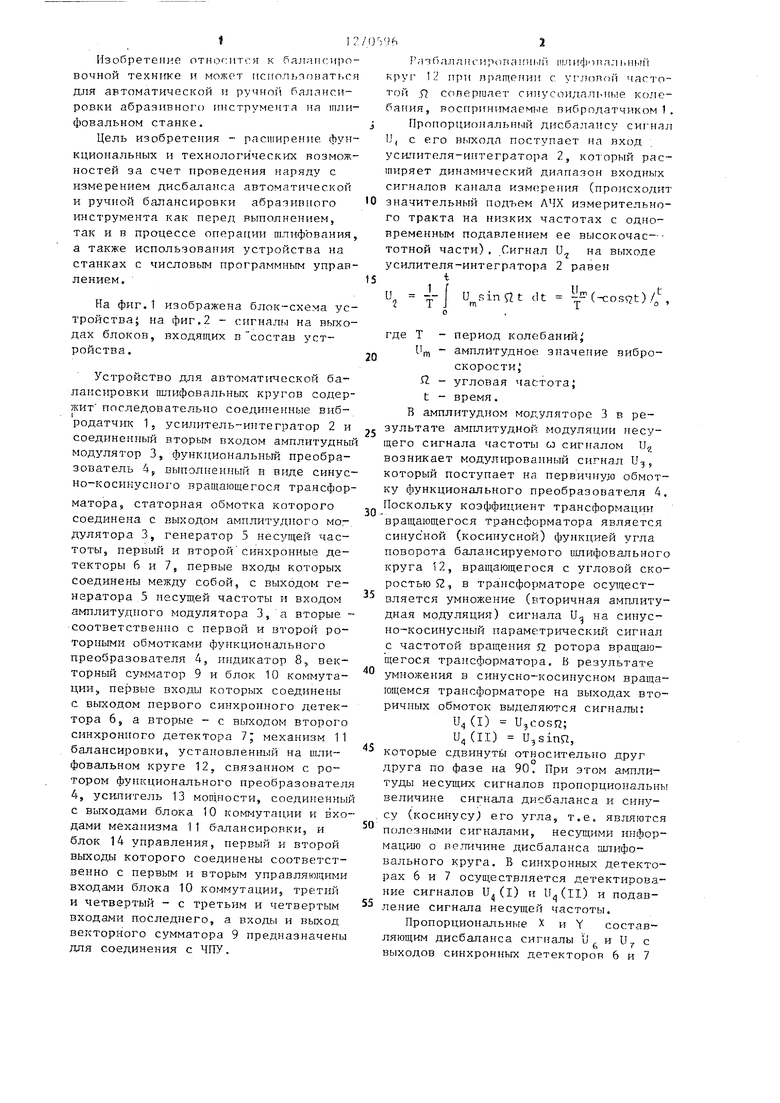
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения дисбаланса | 1975 |
|
SU567981A1 |
| Измерительное устройство к балансировочному станку | 1986 |
|
SU1326927A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1270595A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Измерительное устройство к балансировочному станку | 1989 |
|
SU1649328A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| Способ индикации дисбаланса ротора и устройство для осуществления способа | 1976 |
|
SU605140A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1490518A1 |
Изобретение относится к балансировочной технике. Целью изобретения является расширение функциональных .//. возможностей за счет проведения балансрфовки наряду с Измерением дисбаланса перед выполнением и в процессе операции шлифования. Сигнал дисбаланса разделяется на составляющие с помощью функционального преобразователя 4 и двух синхронных детекторов 6 и 7, выходы которых через блок 10 коммутаций и усилитель 13 мощности соединены с механизмом 11 балансировки, установленным на шлифовальном круге 12 и осуществляющим балансировку путем перемещения двух грузов в прямоугольной системе координат. Управление блоком 10 коммутации осуществляет блок 14 управления, входы которого предназначены для соединения с числовым программным устройством пшифовалЬного станка. 2 ил. к ел О5 ЧПУ fpaz.1 -
| Куинджи А.А., Колосов Ю.А., Народицкая Ю.И | |||
| Автоматическое уравновешивание роторов быстроходных машин, М.: Машиностроение, 1974, с | |||
| Счетная таблица | 1919 |
|
SU104A1 |
| Устройство для измерения дисбаланса | 1975 |
|
SU567981A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
