1
Изобретение относится к балансировочной технике и может быть использовано для индикации дисбаланса вращающихся роторов.
Известен способ индикации дисбаланса, при котором вектор дисбаланса измеряют в прямоугольной системе координат и запоминают по проекциям 1. Известно и устройство для его осуществления.
При этом способе измеренные модуль и угол дисбаланса отсчитываются по соответствующим стрелочным приборам, а место коррекции дисбаланса находят по градусной шкале, связанной с ротором, при этом замеренный угол дисбаланса устанавливают по шкале против указателя, выражающего -в пространстве направление оси измерительной системы координат.
Недостатками такого способа являются наличие операции отсчета угла дисбаланса и установки ротора на этот угол, а также отсутствие свободы выбора точек коррекции на роторе. При этом способе информация о дисбалансе выдается в одной (измерительной) системе координат, которую при коррекции необходимо совмещать с механической системой координат на роторе.
Наиболее близким к предлагаемому способу по технической сущности является способ индикации дисбаланса ротора, заключающийся в том, что измеряют вектор дисбаланса, электрически запоминают его в измерительной прямоугольной системе координат и электрически переносят его в отсчетную систему координат, в которой положение вектора задается угловым положением ротора, а значения составляющих дисбаланса для двух точек коррекции, лежащих на осях коррекции ротора, считывают по проекциям вектора в отсчетной системе координат 2.
Способ осуществляют с помощью устройства, содержащего блоки измерения и запоминания дисбаланса по проекциям в -прямоугольной системе координат, генератор сигнала песущей частоты, два амплитудных модулятора,
синусно-косинусный вращающийся трансформатор, механически связанный с ротором и подключенный двумя входами к выходам модуляторов, два синхронных детектора, подключенных к выходам трансформатора, и два
индикатора дисбаланса.
Недостатком известного способа измерения дисбаланса и устройства для его осуществления является невозможность использования их для вращающихся деталей произвольной конфигурации, когда коррекция должна осуществляться в любой косоугольной системе координат.
С целью автоматического пересчета дисбаланса из измерительной системы координат в
косоугольную систему координат на роторе
перенесенный вектор дисбаланса электрически проектируют на две О .:и отсчетной системы координат, каждая из которых образует прямой угол с соответствующей осью коррекции, а точки коррекции на роторе находят по указателям осей коррекции после разворота вектора до получения рабочих знаков проекций.
Для осуществления этого способа известное устройство снабжено двумя резистивными сумматорами, которые включены между выходами детекторов и входами индикаторов дисбаланса и образуют оси отсчетной системы координат, а соотношение величин резисторов в сумматорах и полярность подключения к ним индикаторов дисбаланса выбраны из условия перпендикулярности каждой из осей отсчетной системы координат соответствующей оси коррекции. Устройство снабжено также амплитудным детектором, подключаемым при измерении к соответствующим синхронному детектору и индикатору дисбаланса.
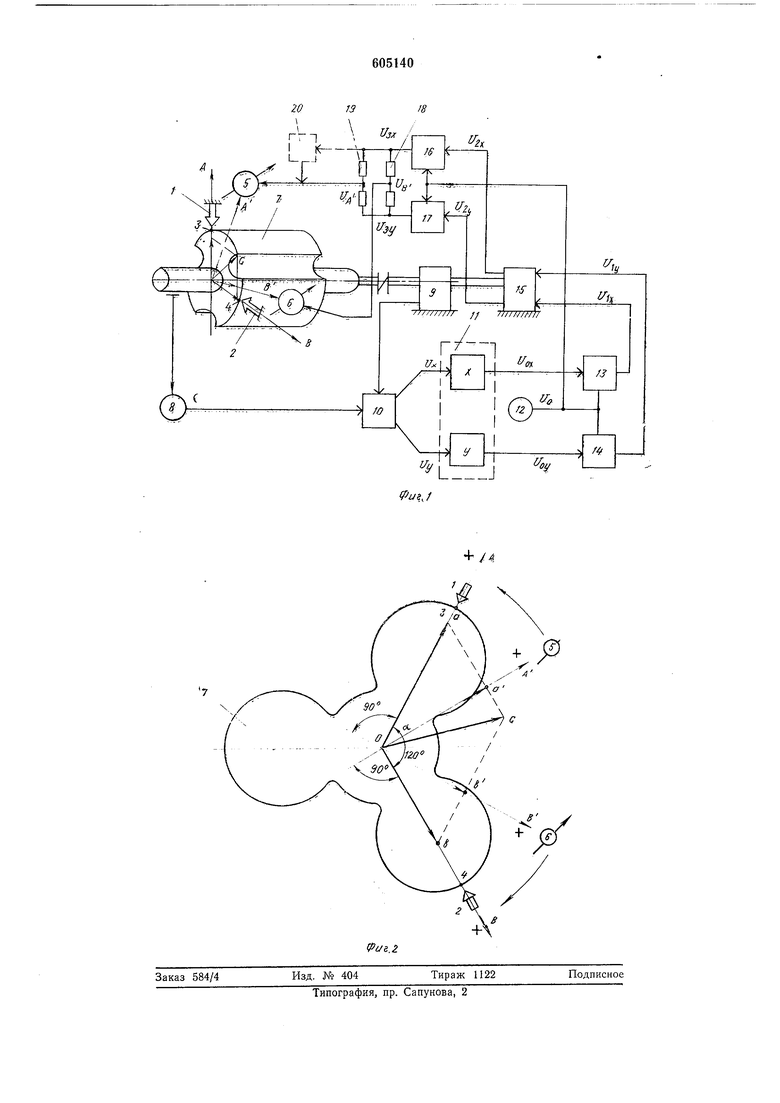
На фиг. 1 изображено устройство для осуществления способа; на фиг. 2 - векторная диаграмма для общего случая разложения вектора на оси коррекции.
Устройство для измерения дисбаланса содержит указатели 1 и 2 направления осей коррекции в пространстве, по которым на роторе определяются точки 3 и 4 коррекции дисбаланса, индикаторы 5 и 6 дисбаланса, балансируемый ротор 7 с установленным на его опору датчиком 8 сигнала дисбаланса, который вместе с измерительным генератором 9, подключенным к входу блока 10 измерения в прямоугольной системе, образует измерительную систему координат, заканчивающуюся блоком 11 запоминания дисбаланса по проекциям.
Отсчетная система координат образована генератором 12 сигнала несущей частоты, подключенным к амплитудным модуляторам 13 и 14, выходы которых соединены с роторными обмотками синусно-косинусного вращающегося трансформатора 15 (СКВТ). К статорным обмоткам СКВТ нодключены синхронные детекторы 16 и 17. Индикаторы 5 и 6 дисбаланса подключены к детекторам через резистивные сумматоры 18 и 19. На время измерения между синхронным детектором 16 или 17 и индикатором 5 или 6 дисбаланса подключается амплитудный детектор 20.
Устройство работает следующим образом.
Запомненный в измерительной системе вектор дисбаланса по проекциям X, Y в виде напряжений Uox, Uoy постоянного тока подается на амплитудные модуляторы 13 и 14, в которых этими напряжениями модулируется по амплитуде сигнал Uo несущей частоты, с частотой, превыщающей частоту вращения. Модуляторы могут быть выполнены по ключевой схеме, например в виде электронных прерывателей, пропускающих сигнал Uox и Uoy на время действия полупериода напряжения Uo. Эти напряжения подводятся к первичным, например роторным, Обмоткам СКВТ, а выходные напряжения U2x и U2y снимаются с вторичных (статорных) обмоток. Напряжения Uix п Uiy, снимаемые с модуляторов, образуют суммарное поле ротора, отображающее запомненный вектор G дисбаланса. Вектор дисбаланса, трансформируясь во вторичные (статорные) обмотки СКВТ, выделяется в виде нанряжений U2x и Ugy. Эти напряжения являются, по существу, проекциями вектора на оси прямоугольной системы координат, поскольку коэффициенты трансформации во вторичные обмотки являются соответственно синусоидальной и косинусоидальной функциями углового положения ротора СКВТ. За счет механической связи носледнего с балансируемым ротором 7 вектор G вращается в этой системе при повороте балансируемого ротора относительно указателей 1 и 2 направления о-сей коррекции. Носле синхронного с несущей детектнрования в синхронных детекторах 16 и 17 выделяются проекции вектора в виде напряжений Usx, Usy .постоянного тока. Разворот осей отсчетной системы координат на требуемый угол осуществляется посредством резистивных сумматоров 18 и 19, выполненных, например, в виде резистивных делителей напряжения, которые включены между выходами синхронных детекторов 16 и 17. На выходах резистивных делителей выделяются проекции вектора дисбаланса в косоугольной
системе координат в виде напрялсений UA- И UB постоянного тока.
В плоскостях коррекции ротора на станке имеются указатели 1 и 2 направления осей коррекции в пространстве, развернутые на
угол, заданный конфигурацией ротора. Например, для трехлопастного вентилятора указатели развернуты под углом 120°. Оси отсчетной системы координат подбором плеч резисторов и подбором полярности подключения к ним
индикаторов дисбаланса развернуты так, что каждая из них образует прямой угол с направлением соответствующего указателя 1 и 2 оси коррекции. Очевидно, что это выполнимо при. расположении указателей осей коррекции в любом квадранте системы и под любым углом, поскольку выбор квадранта осуществляться еще и разворотом исходных осей отсчетной системы, т. е. разворотом статора
СКВТ. Таким образом, настройка системы на требуемые оси коррекции может бьгть осуществлена и в случаях, когда положение указателей точек коррекции конструктивно задано в пространстве, например, сверлильными головцами.
С двух индикаторов 5 и 6 дисбаланса, подключенных к сумматорам, считываются составляющие дисбаланса, пропорциональные рабочим проекциям вектора на оси коррекции
ротора. При этом показания дисбаланса на индикаторе 5 относятся к точке 3 коррекции против указателя 1, а на индикаторе 6 относятся к точке 4 коррекции против указателя 2. Отсчет показаний индикаторов производят
после разворота ротора 7 совместно с вектором G до момента попадания вектора в зону указателей 1 и 2, что фиксируют по рабочим знакам проекций, наиример по отсутствию «зашкаливания прибора.
Для настройки станка на балансируемый ротор необходима индикация модуля вектора в процессе измерения. В предлагаемом устройстве это может быть осуществлено посредством подключения на время измерения одного из индикаторов, например индикатора 5, к синхронному детектору 16 через амплитудный детектор 20 с учетом согласования масштабов измерения.
Как видно из диаграммы, при расположении вектора OG внутри произвольного угла а его прямоугольные проекции Оа и Ob на отсчетные полуоси и ОВЮА, где ОА и ОВ - оси коррекции на роторе, развернуты под углом а (например, ) и соответственно пропорциональны косоугольным проекциям Оа и Ob на оси коррекции ОА и ОБ, что и позволяет раскладывать вектор в выбранной косоугольной системе координат АОВ. Отрезки Оа и Ob через коэффициенты пропорциональности являются проекциями вектора на заданные оси коррекции ротора 7; Расположения вектора OG внутри угла а добиваются посредством разворота ротора 7 (совместно с вектором) относительно неподвижных в пространстве отсчетных осей и указателей направления осей коррекции. Это расположение может быть зафиксировано по показаниям индикаторов 5 и 6. При этом рабочими знаками проекций считают те, которые соответствуют выбранным методам коррекции дисбаланса: например, если коррекция неуравновешенности требует удаления материала, то при установке ротора 7 иа угол добиваются положительных значений обоих иидикаторов, а при добавлении материала - отрицательных и т. д. Следует отметить, что для произвольного положения ротора показания индикаторов дисбаланса всегда соответствуют точкам коррекции на роторе, расположенным против указателей осей коррекции, с учетом знака коррекции для каждой точки.
Формула изобретения
1. Способ индикации дисбаланса ротора, заключающийся в том, что измеряют вектор дисоаланса, электрически запоминают его в измерительной прямоугольной .системе координат и электрически переносят его в отсчетную систему координат, в которой положение вектора задается угловым положением ротора, а значения составляющих дисбаланса для двух точек коррекции, лежащих на осях коррекции ротора, считывают по проекциям вектора в отсчетной системе координат, отличающийся тем, что, с целью автоматического пересчета дисбаланса из измерительной системы координат в косоугольную систему координат на роторе, перенесенный вектор дисбаланса электрически проектируют на две оси
отсчетной системы координат, каждая из которых образует прямой угол с соответствующей осью коррекции, а точки коррекции на роторе находят по указателям осей коррекции после поворота его до получения рабочих знаков проекций.
2.Устройство для осуществления способа по п. 1, содержащее блоки измерения и запоминания дисбаланса по проекциям в прямоугольной системе координат, генератор сигнала несущей частоты, два амплитудных модулятора, синусно-косинусный вращающийся трансформатор, механически связанный с ротором и подключенный двумя входами к выходам модуляторов, два синхронных детектора, подключенных к выходам трансформатора, и два индикатора дисбаланса, отличающееся тем, что оно снабжено двумя резистивными сумматорами, которые включены между выходами детекторов и входами индикаторов
дисбаланса и образуют оси отсчетной системы координат, а соотношение величин резисторов в сумматорах и полярность подключения к ним индикаторов дисбаланса выбраны из условия перпендикулярности каждой из осей отсчетной системы координат соответствующей оси коррекции.
3.Устройство по п. 2, отличающееся тем, что оно снабжено амплитудным детектором, подключаемым при измерении к соответствующим синхронному детектору и индикатору дисбаланса.
Источники информации, иринятые во внимание при экспертизе 1. Патент ФРГ № 118475, кл. 42k 33, 1963, 2. Авторское свидетельство СССР №605139, кл. G 01М 1/22, 1976.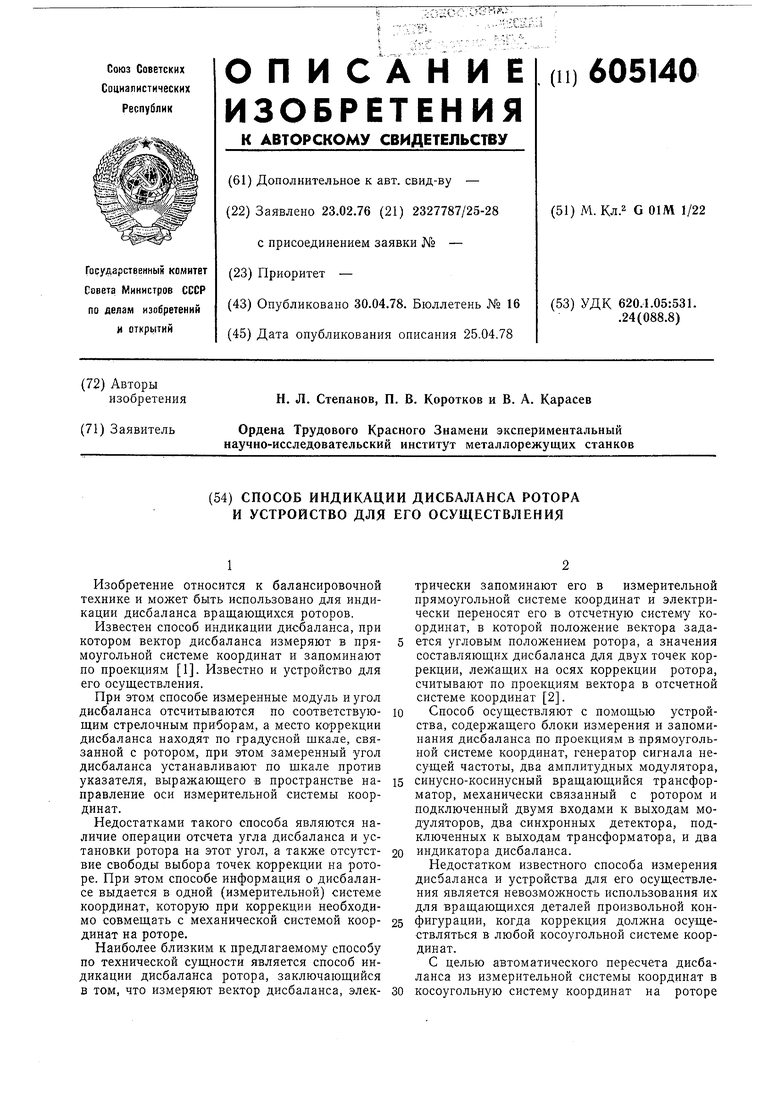
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения дисбаланса ротора и устройство для его осуществления | 1976 |
|
SU605139A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1270595A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1167463A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1095042A2 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1420418A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1259118A1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |