ю
00
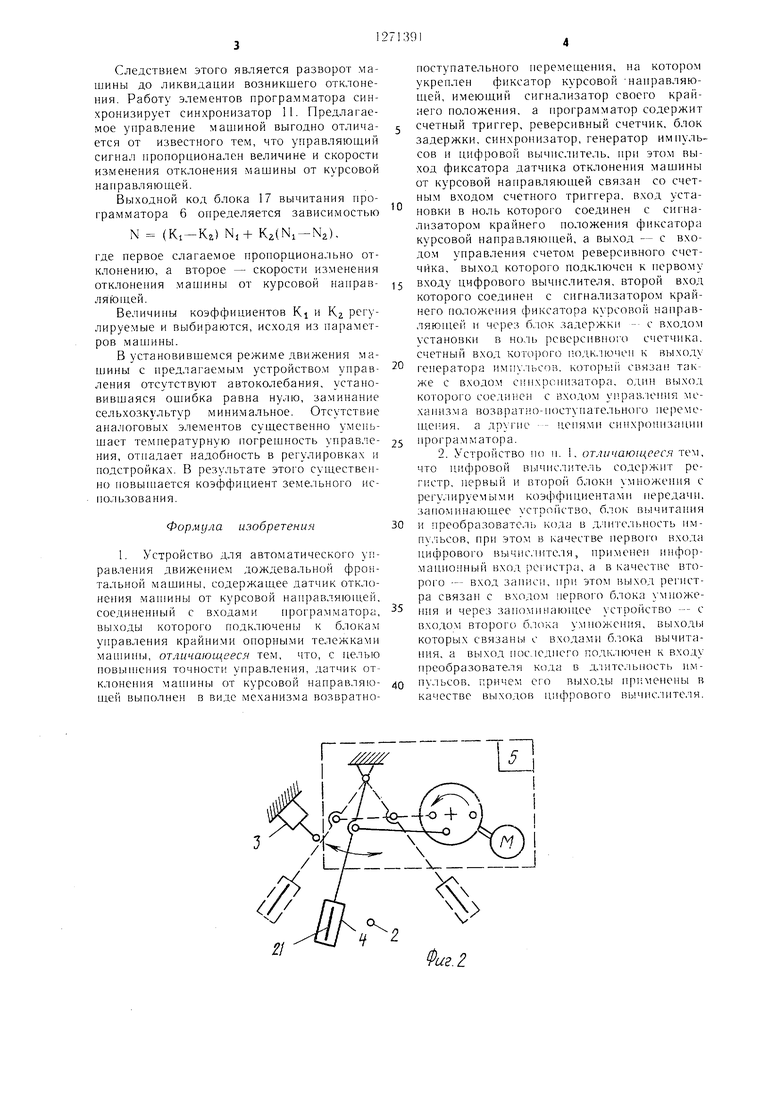
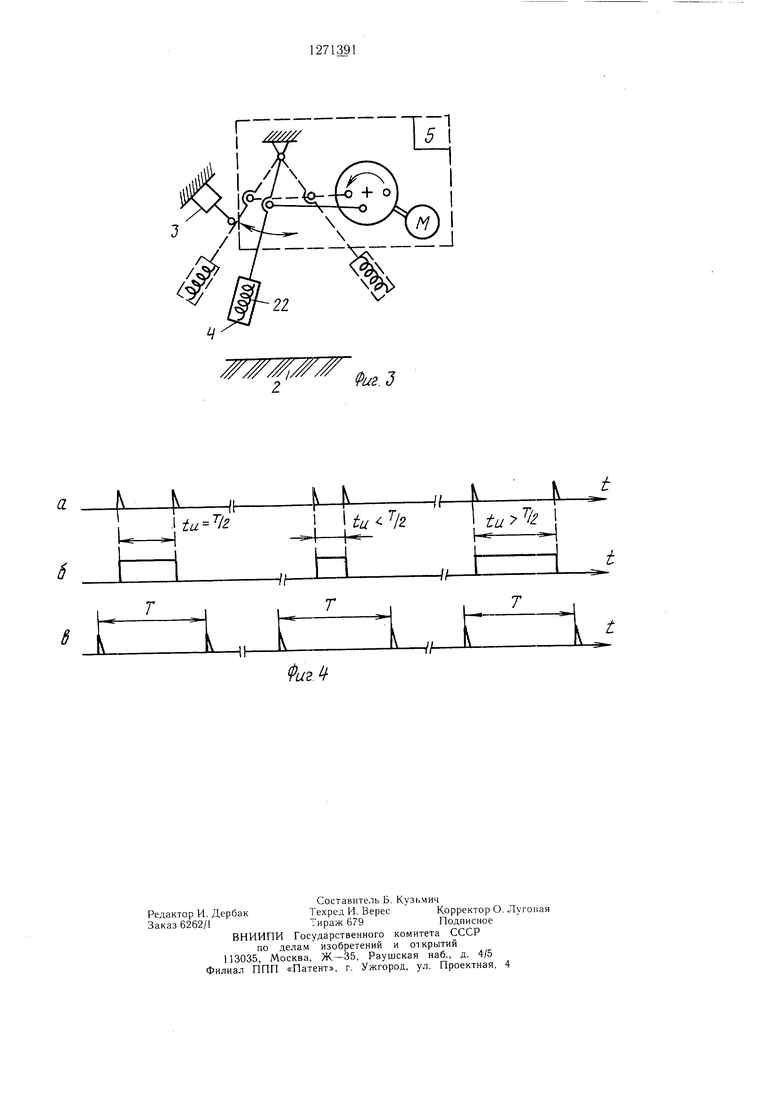
со Изобретение относится к сельскому козяйству и может быть использовано при автоматическом управлении дождевальной П1ирокозахватной машиной. Цель изобретения - увеличение коэффициента земельного использования за счет новьннения точности управления. На фиг. 1 показана структурная схема устройства; на фиг. 2 -- датчик контроля отклонения манжны от курсовой направляющей в виде лазерного луча; на фиг. 3 - то же, в виде электрического провода; на (f)iir. 4 временна диаграмма работы устройства (импульсы, формируемые фнксагором, сигнализатором датчика и счетным триггером программатора). Устройство для автоматиче кого унравления движеьи1ем дождевальной фронтальной ман.1ипы содержит датчик 1 отклонения ман.1ипы от курсовой нанравляющей 2, сосТОЯИ1.ИЙ из сигнализатора 3 крайнего положения фиксатора 4 курсовой направляющей, coBepniaroniero возвратпо-поступательное движение в плоскости, перпендикулярной направлению двнжепия , посредством возвратпо-ноступательного механизма 5, программатор 6, включаюп1ий в себя счетный триггер 7, реверсивный счетчик 8, генератор 9 импульсов, блок 10 задержки, син.чропизатор 11 и цифровой вычислите.пь 12, Цифровой вычислитель состоит из регистра 13, блока 14 умножения с регулируеМ1 1м коэффициентом передачи Ki, блока 15 умножения с регулируе.мым коэффициентом передачи Kj. запоминаюн его устройства 16, блока 17 вычитания, преобразователя 18 кода в длительпость импульсов. Сигпалы е вычислителя 12 поступают иа блоки 19 и 20 управления соответственно левой и нразой крайними тележками. Курсовой направляющей 2 может быть лазерный луч, электрический провод с протекающим неременным электрическим током и т.д. Фиксатор 4 представляет собой рейку 21 из одного узкого длипного фотоэлемента али н(;скольких фотодиодов, фоторсзисторов, фототранзисторов с обпдим выходом. Рейка соверпшет возвратно-иоступательпое движение в плоскости, перпендикулярной направлению движению мапшны, и пересекает лазерный луч 2. Кроме того, фиксатор 4 может представлять собой катущку 22 ин;;уктнвыости, совер1нающую возвратно-поступательпое движ:ение над проводом 2 В качестве сигнализатора 3 может быть нрименен .пюбой конечный выключатель с самовозвратом, например электромеханический микропереключатель, (зотоэлемепт с источником света, между которыми движется гптанга возвратпо-пост.упател)ного мехапизма 5. Устройство работает следующим образом. Фиксатор 4 датчика 1 контроля отклонения мащины совершает периодические возвратно-поступательпые движения отпосительпо курсовой направляющей 2 посредством механизма 5 в плоскости, перпендикулярной направлению движепия мащиньг В результате этого на выхОлТе фиксатора 4 (})ормируются имнульеы с интервалом , поступающие на счетный вход триггера 7. На выходе сигна;щзатора 3 крайне1о положения фиксатора 4 форми)уются импульсы с иериодом Т. На выходе тр-irrepa 7 формируются импульсы длительностью и. При отсутствии отклонения .мапшпы от куреовой па1фавляюн1ей на триггере 7 формируются импульеы длите,.1ьностью Гн Т/2 При отклонении мапипы от курсовой нанравляющей в одну сторону , а при отклонении в другую сторону Т/2 t,T. Импульсы сигпа;п- затора 3 периодически обпуляют триггер 7, счетчик В и регистр 13, причем обнуление счетчика 8 происходит носле обнуления триггера 7 и pei-иетра 13 за счет блока 10 задержки. Счетчик 8 ведет нарастающий счет имн.ульсов генератора 9 при наличии импульса на выходе триггера 7 и обратный (епадаю1ций| счет при отсутствии импульса на выходе т)игтера 7. В качестве реверсивного сче1чика 8 ис|ю,тьзу1от любые известные микросхемы. За период времени Т выходной код счетчика 8 тождественен разности 2in и Т: NI .--T. Нрогра.мматор 6 вырабатывает сигнал для блоков 19 и 20 управ;1ения крайними тележками следуюп и.м образом. Г5ыходной код счетчика 8 но окончании каждого такта длительностью Т записывается в регистре 13, умножается па заданный коэффициепт передачи К1 блоко.м 19 умножения и поступает па одип вход блока 17 вычитания. На другой вход б,1ока 17 вычитания поступает код Nj, образ.ющийея из кода регистра 13 задержкой на г)дип такт запоминающим уетройство.м 16 и умножением на заданный коэффициент блоком 15 умножения. На выходе блока 17 вычитания формируется цифровой ко ч N / KiN , который преобразуется преобразователем 18 кода в импульс с()ответствуюп1ей .алитель1К1СТИ, поступаюп пи в зависимости от знака кода в блоки 19 или 20 управления крайними тележками. Б качестве нреобразователя 18 иснользуют известную микросхе.му. Блок управления крайней тележки, в который поступил и.мпульс преобразоватсля 18, осуществляет коррекцию скорости движ;ения соответетвующс й тележки у.мепьniei-ne.M времепи включения ее на ве.;1ичину. нропорциона;1ьну1о длительности имnv..
Следствием этого является разворот машины до ликвидации возникшего отклонения. Работу элементов программатора синхронизирует синхронизатор 11. Предлагаемое управление машиной выгодно отличается от известного тем, что управляющий сигнал пропорционален величине и скорости изменения отклонения машины от курсовой направляющей.
Выходной код блока 17 вычитания программатора 6 определяется зависимостью
N (Ki-Kz NJ+ Ki(Ni-N2),
где первое слагаемое пропорционально отклонению, а второе - скорости изменения отклоне1шя машины от курсовой направляю1цей.
Величины коэффициентов KI и К2 регулируемые и выбираются, исходя из параметров машины.
В установившемся режиме движения с предлагаемым устройство.м управления отсутствуют автоколебания, установившаяся ошибка равна нулю, заминание сельхозкультур минимальное. Отсутствие аналоговых элементов существенно уменьшает те.мпературную погрешность управления, отнадает надобность в регулировках и подстройках. В результате этого существенно повышается коэффициент земельного использования.
Формула изобретения
1. Устройство для автоматического управления движе1шем дождевальной фронтальной машины, содержащее датчик отклонения машины от курсовой нанравляющей, соединенный с входами |рограмматора, Б1з1ходы которого подключены к блокам управления крайними опорными тележками ман1И1П 1, отличающееся тем, что, с целью повьнпения точности управления, датчик отклонения ман1ины от курсовой нанравляющей выполнен в виде механизма возвратнопоступательного перемещения, па котором укреплен фиксатор курсовой направляющей, имеющий сигнализатор своего крайнего положения, а программатор содержит счетный триггер, реверсивный счетчик, блок задержки, синхронизатор, генератор имну,1ьсов и цифровой вычислитель, нри этом выход фиксатора датчика отклонения мащины от курсовой направляющей связан со счетным входом счетного триггера, вход установки в ноль которого соединен с сигнализатором крайнего положения фиксатора курсовой направляющей, а выход - с входом управления счетом реверсивного счетчика, выход которого подключен к первому входу цифрового вычислителя, второй вход которого соединен с сигнализатором крайнего положения фиксатора курсовой нанравляюп1ей и через б.лок задержки - с входом установки в но.ль реверсивпо1о счетчика, счетный вход кото)ого под.к.цочен к выходу генератора импульсов, которьп связан также с входом синхронизатора, один выход когорого соединен с входом управ.1ения меха IHISM а возврат1 0-постунательно1о не рем еще1 ия, а другие - цепями синхронпзацип программатора.
2. Устройство по II. 1, отличающееся тем, что нлфровой вычис.читель содержит регистр, первый и второй блокп умножения с регулируемыми коэффип.иентами передачи, заномипающее устройство, б, вычитания и преобразователь кода в длительность импульсов, при этом в 1 ачестве первого входа цифрового вычис,1ителя, нримепеп информационный вход pel истра, а в качестве втоpoio - вход записи, при. этом выход регистра связап с входом первого блока умножения и через запомпнак)П1ее устройство -- с входом второго блока умпожения, вьгходы которых связаны с входами блока вычитания, а выход последнего подк,почен к входу преобразователя кода в д,1нте.чы1ость импульсов, причем его вы.чоды iipiiMeneinji в качестве выходов цифрового вы.чис.щте.пя.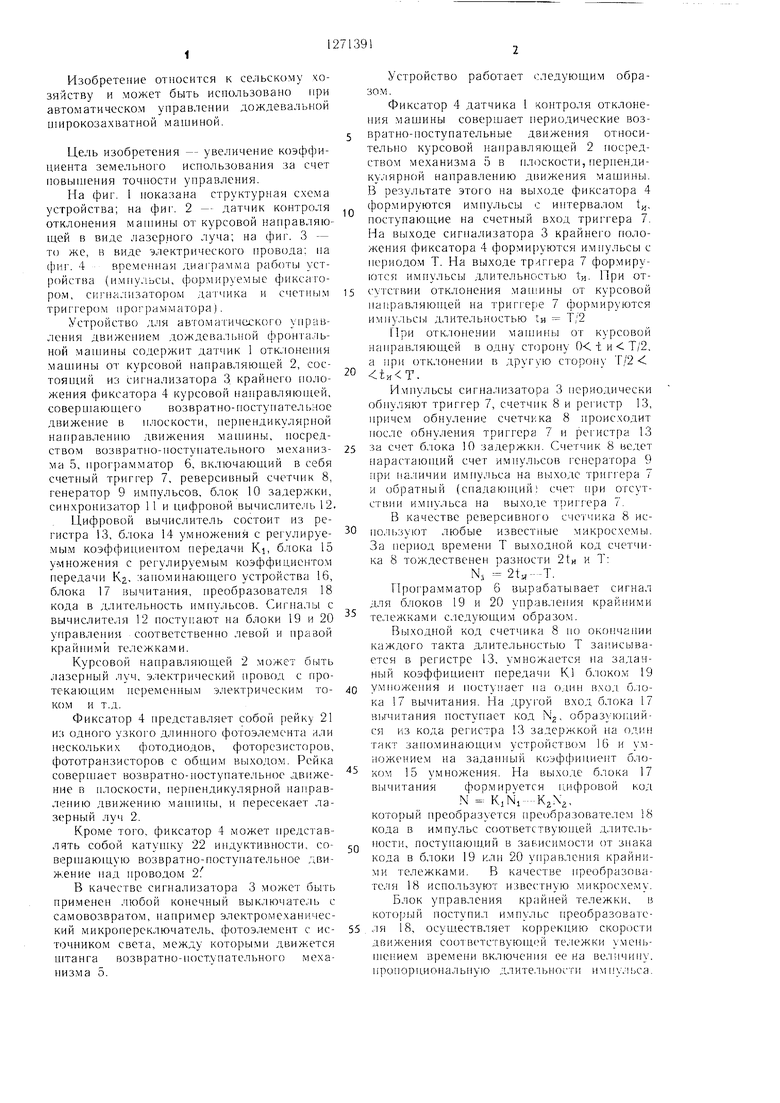
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для потележечного взвешивания вагонов в движении | 1982 |
|
SU1027530A1 |
| Устройство для автоматизированной градуировки датчика силы | 1988 |
|
SU1606889A1 |
| Устройство для измерения мощности цилиндров двигателя внутреннего сгорания | 1990 |
|
SU1789898A1 |
| СИГНАЛИЗАТОР ПРЕДАВАРИЙНЫХ ДЕФОРМАЦИЙ ЛОПАТОК ТУРБОМАШИН | 2000 |
|
RU2177145C1 |
| Устройство для сварки давлением | 1987 |
|
SU1459864A1 |
| Устройство для регулирования массовых расходов смешиваемых продуктов | 1988 |
|
SU1695273A1 |
| Устройство для симметрирования токов трехфазных сетей | 1988 |
|
SU1686600A1 |
| Устройство для распознавания прямого края объекта | 1988 |
|
SU1587552A1 |
| Устройство для распознавания прямого края объекта | 1980 |
|
SU947882A1 |
| Устройство для контроля и регистрации параметров процесса высева | 1988 |
|
SU1737476A1 |
изобретение относится к сельскому хозяйству, а именно к автоматизации поливных и мелиоративных работ. Цель изобретения - повышение точности управления. Устройство содержит датчик 1 отклонения машины от курсовой направляющей, программатор 6 и блоки 19 и 20 управления фланговыми тележками. Фиксатор 4 датчика 1 совершает возвратно-поступательные движения в плоскости, перпендикулярной направлению движения маншны. На выходе фиксатора 4 формируются импульсы с интервалом. Эти импульсы поступают на триггер 7. При отклонении мапшны от курсовой направляюп1.ей изменяется интервал следования импульсов. Счетчик 8 ведет счет имиульсов генератора 9 и триггера 7. В зависимости от соотношения количества импульсов вырабатывается управляющий сигнал на блоки 19 и 20 унравления. Управляющий сигS нал пропорционален величине н скорости (Л изменения отклонения машины от курсовой направляющей. з. п. ф-лы, 4 ил.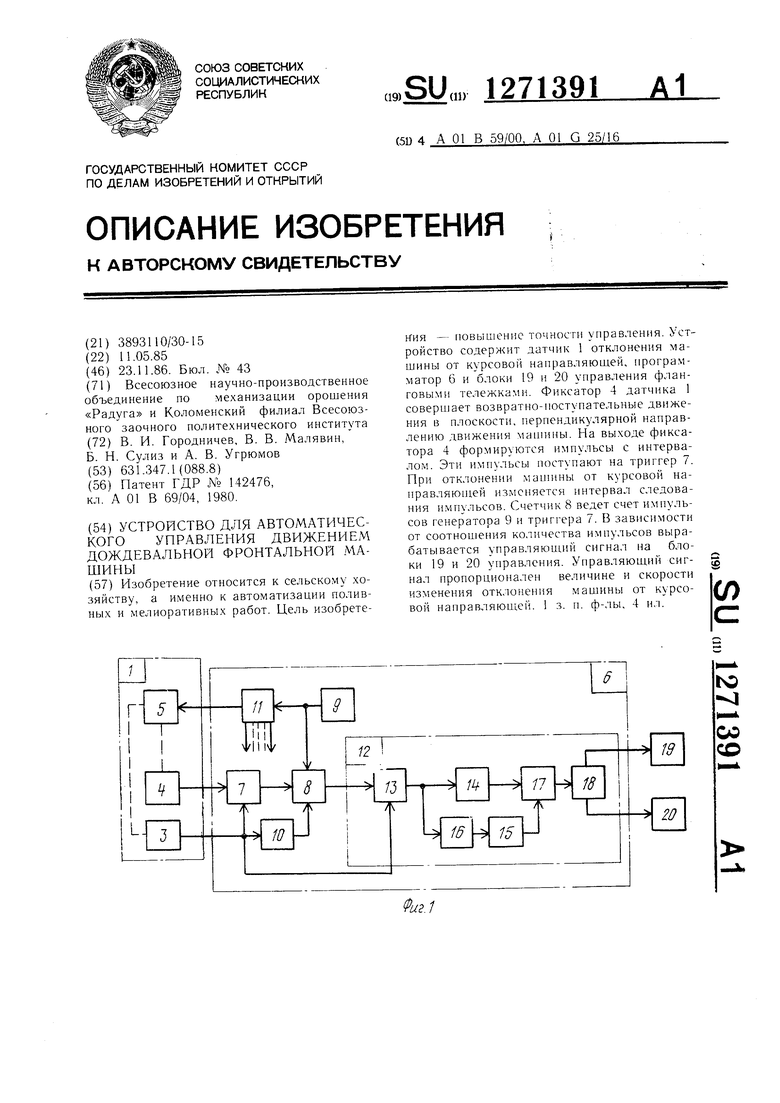
Г
ж . ,
2Риг. J
Г
Т
LJ
6
Фиг
2
| Способ ускоренного определения склонности к коррозионному растрескиванию алюминиевых сплавов | 1961 |
|
SU142476A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
