ю
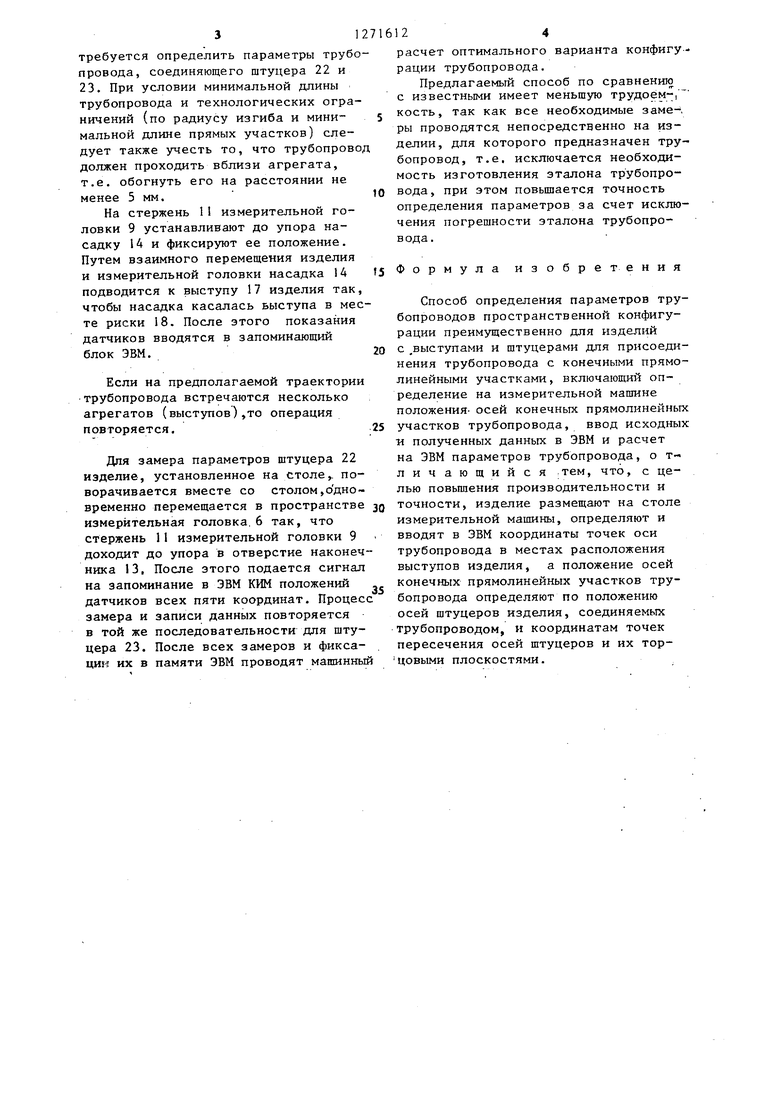
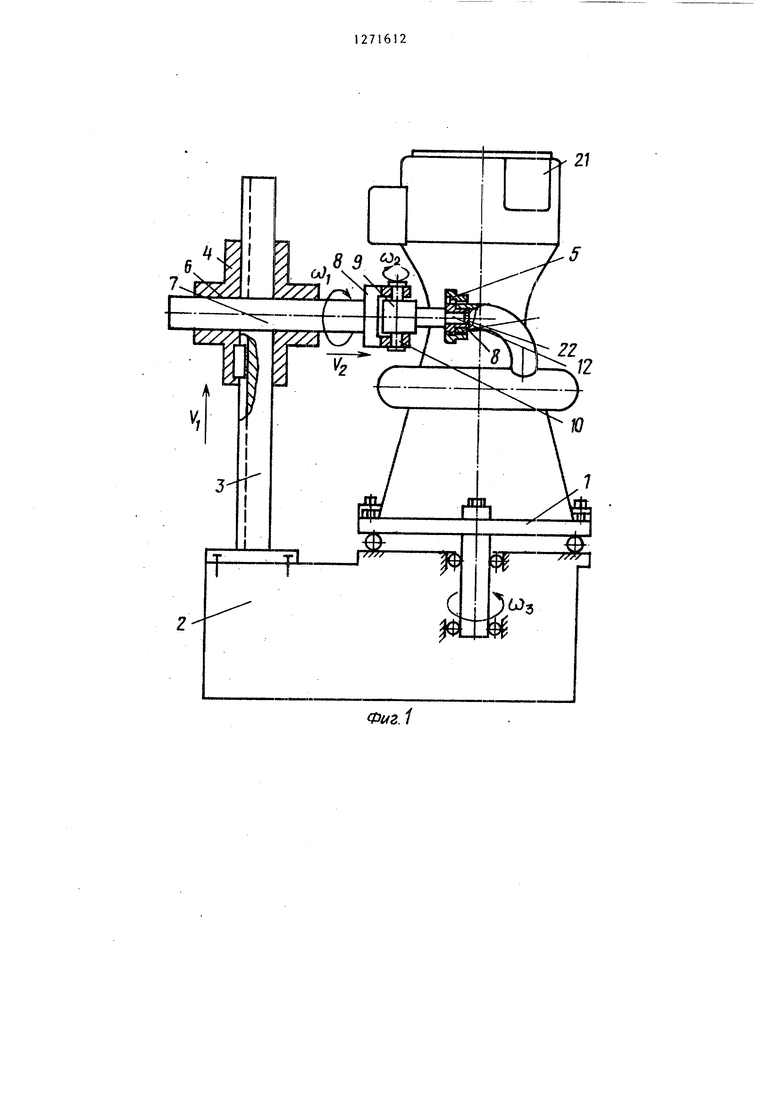
55 Э Изобретение.относится к обработке металлов давлением и может быть использовано при изготовленШ1 трубопро водов пространственной конфигурации в авиационной, машиностроительной и других отраслях промьшшенности. Цель изобретения - повьппение произэодительности путем уменьшения его трудоемкости и повьшение точности определения параметров трубопрово доз. , На фиг. 1 представлена схема уста новки изделия на координатно-измерительной машине; на фиг. 2 - схема расположения трубопровода на изделии на фиг. 3 - схема установки оснастки при измерении .координат штуцера; на фиг. 4 - оснастка головки измерительной машины, Способ осуществляется следующим образом. . Устанавливают на столе координатно-измерительной машины изделие, на котором должны быть установлены трубопроводы. Изделие имеет все входящие в его состав агрегаты со штуцера ми для присоединения трубопроводов. Визуально определяют на изделии наиболее выступающие участки, которые должны огибаться трубопроводами определяют на измерительной машине с последующим вводом в 3BMi коорклнаты то«ек оси трубопролода в местах выступов изделия. Затем определяют на измерительной машине положение осей штуцеров изделия, соединяемых трубопроводом, которые соответствуют поло хениш осей конечных прямолинейных участков трубопровода и координат точек пересечения осей штуцеров с ;их торцовыми плоскостями. Полученные результаты измерений вместе с исходными данными (допустимьй радиус гиба, диаметр трубы и др. вводят в ЭВМ и рассчитывают парамет,ры трубопровода. Дпя осуществления способа используется координатно-измерительиая машина (КИМ) с поворотным столом 1 и с пятью степенями свободы. Стол КИМ кинематически связан с датчиком угла поворота стола (например, круговьм йндуктосином или потенциометром), сиг налы которого передаются в запоминающий лок - регистрирующее вычислитель ного устройства КИМ (обычно представляющим собой ЭВМ) . Стол не имеет механического привода и поворачивается 1 22 вручную.На основании 2 КИМ установлена вертикальная стойка 3, на которой установлена с возможностью вертикального перемещения каретка 4, предохраняемая от поворота вокруг стойки 3 шпонкой 5. Каретка 4 связана кинематически с датчиком перемещения (не показан) , например линейным йндуктосином или потенциометром, который выдает электрический сигнал, пропорциональный величине перемещения каретки от исходного положения, например . крайнего нижнего,, которое принимается за нуль. Каретка 4 имеет горизонтальное отверстие 6, в котором установлена с возможностью горизонтального перемещения и поворота вокруг своей оси штанга 7 с вилкой 8. При этом штанга 7 кинематически связана с датчиком продольного перемещения и датчиком поворота (не показаны). В отверстиях вилки 8 установлена с возможностью поворота головка 9, имеющая ступенчатый стержень 11, меньшая ступень которого выполнена по ходовой посадке. Ось 10 поворота головки 9 перпендикулярна оси стержня 11 ,а расстояние от оси до торца постоянно. Измерительная головка 9 кинематически связана со своим датчиком угла поворота (не показан). Кроме того, КИМ укомплектовывается оснасткой, содержащей наконечники I3 и насадки 14, диаметр классных отверстий которых равен диаметру меньшей ступени стержня 11 измерительной головки 9. Расстояние между торцами 15 и 16 наконечников 13 постоянное. Наружный диаметр насадки 14 равен удвоенному значению требуемого ( диаметр трубы +5 мм) 1эасстояния оси проектируемого трубопровода от выступа 17 изделия. На наружном диаметре насадки выполнена риска 18 на расстоянии от торца 19, равном глубине внутренней проточки. Насадка снабжена фиксатором 20.. Пример. В память ЭВМ вводятся постоянные величины: расстояние от оси 10 до торца 12 измерительной головки 9, расстояние между торцами 15 И 16 наконечников 13, диаметртрубы, минимальньш радиус изгиба трубы, минимальньй прямолинейный гчасток трубопровода и др. Изделие 21 закрепляется на поворотном столе 1 координатно-измерительной машины. Например, 31 требуется определить параметры трубо провода, соединяющего штуцера 22 и 23. При условии минимальной длины трубопровода и технологических ограничений (по радиусу изгиба и минимальной длине прямых участков) следует также учесть то, что трубопрово должен проходить вблизи агрегата, т.е. обогнуть его на расстоянии не менее 5 мм. На стержень 11 измерительной головки 9 устанавливают до упора насадку I4 и фиксируют ее положение. Путем взаимного перемещения изделия и измерительной головки насадка 14 подводится к выступу 17 изделия так, чтобы насадка касалась выступа в мес те риски 18. После этого показания датчиков вводятся в запоминающий блок ЭВМ. Если на предполагаемой траектории трубопровода встречаются несколько агрегатов (выступов),то операция повторяется. Дпя замера параметров штуцера 22 изделие, установленное на столе,, поворачивается вместе со столом,одновременно перемещается в пространстве измерительная головка. 6 так, что стержень 11 измерительной головки 9 доходит до упора в отверстие наконеч ника 13, После этого подается сигнал на запоминание в ЭВМ КИМ положений датчиков всех пяти координат. Процес замера и записи данных повторяется в той же последовательности для штуцера 23. После всех замеров и фиксации их в памяти ЭВМ проводят машинны 124 расчет оптимального варианта конфигурации трубопровода. Предлагаемый способ по сравнению с известными имеет меньшую трудоем-, кость, так как все необходимые заме-, ры проводятся непосредственно на изделии, для которого предназначен трубопровод, т.е. исключается необходимость изготовления эталона трубопровода, при этом повьшзается точность определения параметров за счет исключения погрешности эталона трубопровода. Формула изобретения Способ определения параметров трубопроводов пространственной конфигурации преимущественно для изделий с .выступами и штуцерами для присоединения трубопровода с конечными прямолинейными участками, включающий определение на измерительной машине положения- осей конечных прямолинейных участков трубопровода, ввод исходных ц полученных данных в ЭВМ и расчет на ЭВМ параметров трубопровода, о т личающийся тем, что, с целью повьШ1ения производительности и точности, изделие размещают на столе измерительной машины, определяют и вводят в ЭВМ координаты точек оси трубопровода в местах расположения выступов изделия, а положение осей конечных прямолинейных участков трубопровода определяют по положению осей штуцеров изделия, соединяемых трубопроводом, и координатам точек пересечения осей штуцеров и их торцовыми плоскостями.
г-2
Ф.1
ZJ
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Координатная измерительная машина | 1990 |
|
SU1795264A1 |
| Способ гибки труб по эталону на станках с программным управлением | 1985 |
|
SU1287966A1 |
| Устройство для базирования гнутых труб к координатно - измерительной машине с ЭВМ для измерения взаимного расположения концевых прямолинейных участков труб, их присоединительных поверхностей и разметки их концов | 1990 |
|
SU1783279A1 |
| Способ гибки труб по эталону на станках с программным управлением | 1986 |
|
SU1391765A1 |
| Способ определения погрешностей трехкоординатной измерительной машины | 1990 |
|
SU1767341A1 |
| СПОСОБ ГИБКИ ТРУБ ПО ЭТАЛОНУ НА СТАНКАХ С ПРОГРАММНЫМ УПРАВЛЕНИЕМ | 1979 |
|
SU825231A1 |
| КООРДИНАТНО-ИЗМЕРИТЕЛЬНАЯ МАШИНА (КИМ) | 2005 |
|
RU2307321C2 |
| Способ измерения формы поверхности детали | 1990 |
|
SU1753237A1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПОВЕРХНОСТЕЙ СЛОЖНОПРОФИЛИРОВАННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2243503C2 |
| КООРДИНАТНО-ИЗМЕРИТЕЛЬНАЯ МАШИНА | 1990 |
|
RU2068984C1 |

Изобретение относится к обработке металлов давлением и может быть использовано в авиационной, машиноI строительной и других отраслях про мьппленности. Изобретение позволяет повысить производительность н точность определения параметров трубопроводов. Изделие устанавливают на столе и поворачивают вместе с ним. Одновременно перемещается в пространстве измерительная головка и с датчиков перемещений пяти координат подается сигнал на запоминание в ЭВМ. После замеров всех сигналов и фикса.ции их в памяти ЭВМ производят машин; ный расчет оптимального варианта конфигурации трубопровода. Способ позволяет уменьщить трудоемкость, :так как отпадает необходимость изго§ товления эталона трубопровода, поскольку все замеры проводятся на из(Л делии. 4 ил. с:
11
Фиг.З
| СПОСОБ ГИБКИ ТРУБ ПО ЭТАЛОНУ НА СТАНКАХ С ПРОГРАММНЫМ УПРАВЛЕНИЕМ | 1979 |
|
SU825231A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
