(Л
С

| название | год | авторы | номер документа |
|---|---|---|---|
| ПОВЕРОЧНЫЙ КОМПЛЕКС КООРДИНАТНЫХ ПРИБОРОВ И ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2012 |
|
RU2494346C1 |
| МНОГОКООРДИНАТНАЯ МЕТРОЛОГИЧЕСКАЯ ПЛАТФОРМА | 2007 |
|
RU2365953C1 |
| Трехкоординатная измерительная головка | 1990 |
|
SU1796865A1 |
| СПОСОБ ГИБКИ ТРУБ ПО ЭТАЛОНУ НА СТАНКАХ С ПРОГРАММНЫМ УПРАВЛЕНИЕМ | 1979 |
|
SU825231A1 |
| КООРДИНАТНО-ИЗМЕРИТЕЛЬНАЯ МАШИНА (КИМ) | 2005 |
|
RU2307321C2 |
| Способ калибровки мобильных 3D-координатных средств измерений и устройство для его реализации | 2018 |
|
RU2710900C1 |
| Способ определения погрешностей измерения перемещений подвижных органов координатно-измерительной машины | 1987 |
|
SU1420339A1 |
| Координатная измерительная машина | 1990 |
|
SU1795264A1 |
| Способ определения погрешностей сборки редуктора | 1985 |
|
SU1464035A1 |
| СПОСОБ КОНТРОЛЯ ОПТИЧЕСКОГО ВЗАИМОДЕЙСТВИЯ С ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2188389C2 |
Изобретение относится к приборостроению, в частности к технике контроля трех- координатных измерительных машин, и может быть использовано для организации их поверки при эксплуатации. Цель изобретения - повышение информативности определения погрешностей. Для этого необходимо количество взаимно перпендикулярных наконечников измерительной головки измеряют на каждой стороне ориентированного вдоль координатных осей полом параллелепипеде точки, расположенные вблизи углом, и взаимно перпен- дикулярные поверхности, вычисляют координаты точек пересечения всех взаимно перпедикулярных сторон, сравнивают полученные результаты с предыдущими и по результатам измерения и вычисления определяют раздельно метрологические и технологические погрешности. 1 ил.
Изобретение относится к контрольно- измерительной технике, а именно к способам проверки трехкоординатных измерительных машин (КИМ),
Наиболее близким к предлагаемому способу является способ определения погрешностей КИМ. заключающийся в том. что на рабочем столе машины вдоль координатных осей ориентируют параллелепипед, измеряют при помощи пяти взаимно-перпендикулярных наконечников измерительной головки отдельные его точки, при этом определяют раздельно метрологические и технологические погрешности.
Недостатком этого способа является высокая трудоемкость измерения и определение лишь незначительной части метрологических (три осевых погрешности) и технологических (три угла поворота) погрешностей.
Целью изобретения является повышение достоверности определения погрешностей, а именно обеспечение возможности дополнительно определять по крайней мере четыре метрологических (три плоскостных и одну пространственную) и 15 технологических (шесть углов поворота, шесть отклонений от прямолинейности и три отклонения от перпендикулярности) погрешностей
Указанная цель достигается тем, что располагают измерительные точки на каждой стороне параллелепипеда вблизи его углов по четыре на каждой стороне, сканируют наконечниками не менее трех взаимно перпендикулярных поверхностей параллелепипеда и измеряют каждым из пяти перпендикулярных наконечников координаты точек, доступные для соответствующего наконечника, затем определяют уравнения каждой стороны параллелепипеда и координаты точек их пересечения, а погрешности
Ч
О
VI
CJ
Јь
определяют на основе полученных результатов измерения.
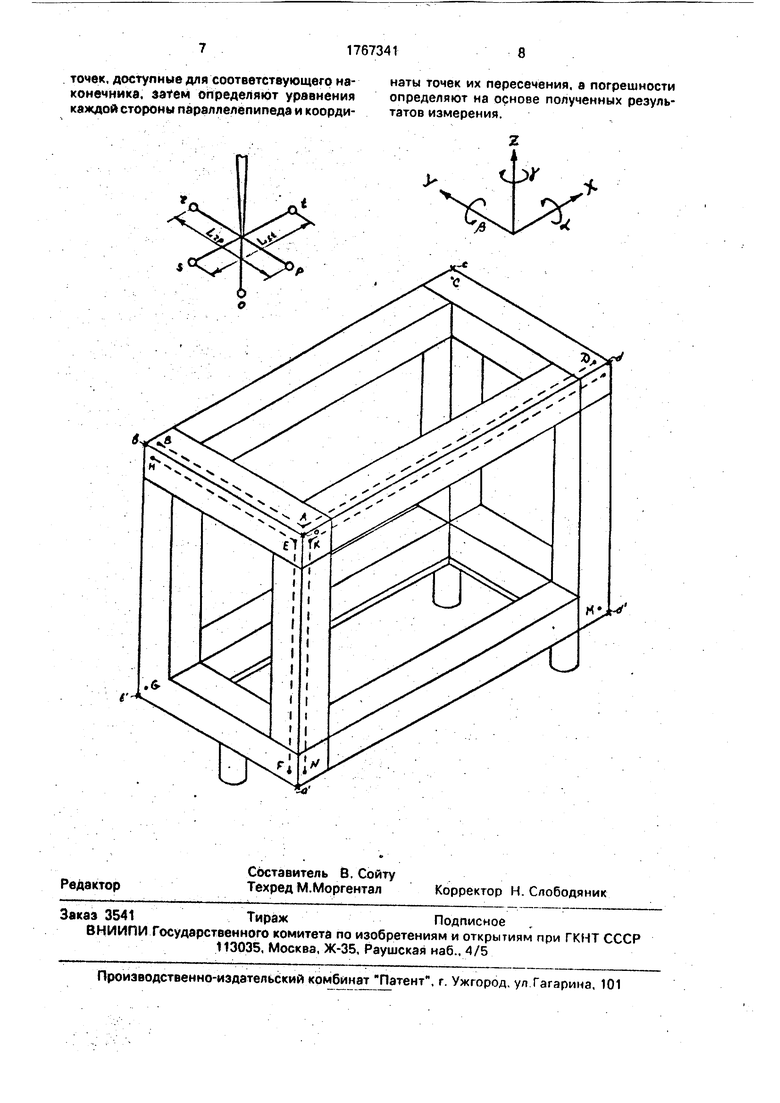
На чертеже приведена принципиальная схема параллелепипеда и измерительной головки.
Способ осуществляется следующим образом.
В измерительном пространстве КИМ (на ее рабочем столе) устанавливают параллелепипед. Габаритные размеры параллелепипеда зависят от пределов измерения КИМ размеров наконечников измерительной головки. Для уменьшения массы параллелепипеда желательно выполнять его полым как показано на фигуре. Ориентируют параллелепипед (приблизительно) вдоль координатных осей. Закрепляют на КИМ измерительную голопку с пятью (о, р, г, s, t) взаимно перпендикулярными наконечниками, ориентированными (приблизительно) вдоль координатных осей.
Сканирование поверхностей параллелепипеда и измерение на нем отдельных точек, выполняют в произвольной (наиболее удобной и производительной для опора- тора) последовательности,
Сканирование поверхности необходимо для определения отклонений от прямолинейности и перпендикулярности траекторий перемещения измерительных кареток КИМ, а измерение отдельных точек - для определения всех углов поворота измерительных кареток GO время их поступательного движения и всех метрологических погрешностей.
Измеряют методом сканирования, например, следующие участки поверхностей параллелепипеда (пунктирными линиями):
наконечником о - ЕЙ и KL;
наконечником г - Ар и EF;
наконечником t - АВ и КМ.
Затей измеряют координаты следующих отдельных точек:
наконечником о - точки А, В, С, D, К, L,
L1, Е, Н, Е .Н ;
наконечником г - точки К, L, M, N, A, D, A .D1, Е. F. E .F ;
наконечником р-точки К1, L1, мЛ N , С, В, С1, B .G, H.G1, Н1;
наконечником t - точки Е, F, G, Н, А, В, А . В1. К. N. К1, N1;
наконечником s-точки Е1, Fl, G , H1, С, D, С1, D1. L, M, L1. M1.
(Точки А1, В , .... N1 (не изображены) являются сопряженными точками точек А. В, ..., N и расположены на противоположных сторонах параллелепипеда).
На основании полученных результатов измерения определяют (как среднеквадра- тические плоскости) все стороны параллелеК
I i t
пипеда, и затем координаты точек (а, Ь, .... d ) пересечения всех взаимно перпендикулярных его сторон.
Определяют раздольно по известным
зависимостям технологические (углы поворота, отклонения от прямолинейности и перпендикулярности) и метрологические (осевые, плоскостные и пространственные) погрешности.
0 В зависимости от конструктивного построения КИМ, а более конкретно, в зависимости от того по какой координатной оси или осям подвижным обьектом является из- , мерительная головка формулы вычисления
5 углов поворота могут быть различны, но принципиально ие отличаются друг ог друга.
Так, например, для КИМ с подвижным столом (каретка X) неподвижным порталом
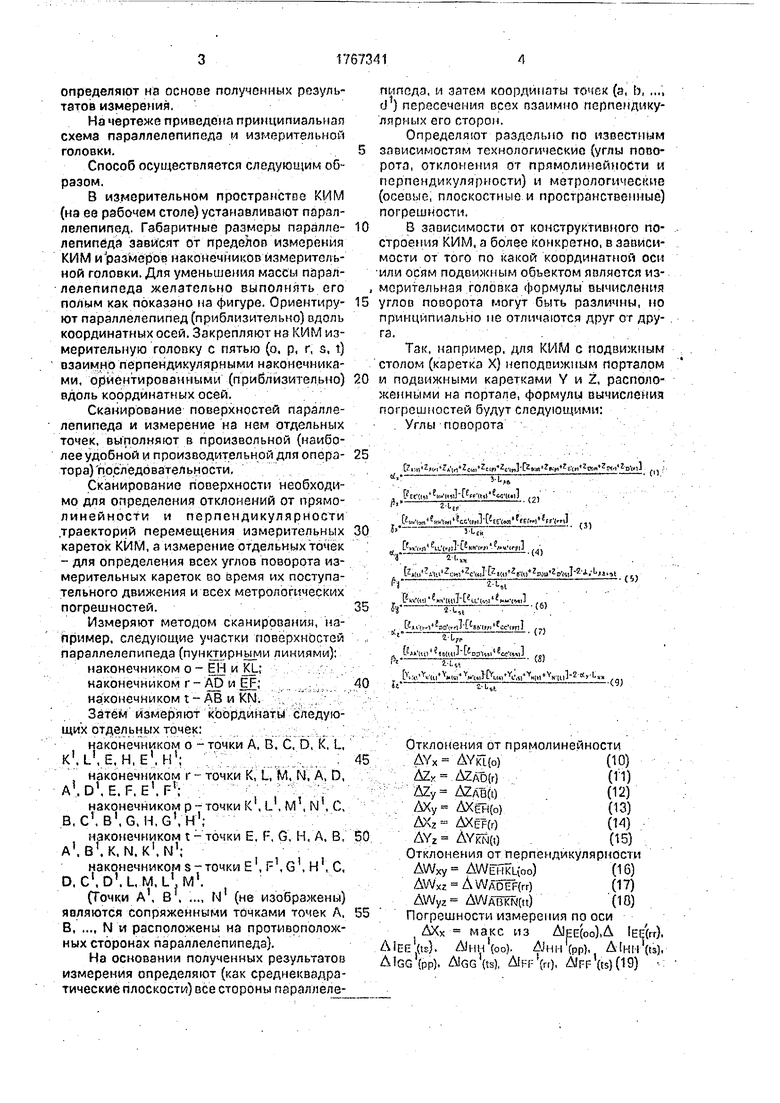
0 м подвижными каретками Y и Z, расположенными на портале, формулы вычисления погрешностей будут следующими: Углы поворота
io),,Zi:ai ZC|f,«Ze.|p)-fZ5at,(,t(,, Zr|0,Zr,20viJ ,..
«Ј,(
5
ro
Ee iui °n i iH iui °« U«iJ
(21
, Cta WeB4Wtec n№tE «n ttEM 4 rJ
(3
Ц.(ге)(лКН (гр1 л.цЧГрЫ 0U I. k4
bAtll -t4tl ЈLH 2C «J&t(«tft ftl4ZlJB fZ0 «J «ll M t
. Pk«4f «s (.L44-}4 MM (M|
Ц
, 14 -op rrfl J Шмг/)f cc fprl J
J.J. - ..
i bjr
л t°a 1 .
(«
(6)
(7)
Л it;l -a6tHlJ - sgissl CT(M1J -e.
гц:WI
. X (tl V.a УшНУц.,... ( « Ь.
«гTt
(9)
5
0
Отклонения от прямолинейности AYX ЛУкцо)(10)
AZx Дгщг)(ц)
Л2У Д2лоа)(12)
ДХУ ДХвн(о)(13)
ДХг- AXEF(r)(14)
AY2 (o(15)
Отклонения от перпендикулярности
AWxy AWEHKL{oo)(16)
ЛШ... Л )
(Ю)
iiVVbHKLvoo; AWX2 Л WЈ ОЩгг)
AWy2 AWABKN(tt)(10)
5 Погрешности измерения по оси
ДХх макс из AlFE(oo),A IEE CIT),
AlEE(te). AlunVoo). Лнн срр)-. AlHIlW AfGG (pp), AlGG (ts), AfFF (n). AlFP (ts)(19)
ЛУу макс из А1кк (оо). A IKK (u), А)кк (гр), А1 и (оо). Alu (ss),
Alu(rp), AlMM (ss). AlMM W A INN (It).
AlNfj1(rP)-,(20)
AZZ ° макс из (п), (is),
AlDDW AlnoW А)вВ(рр), AlBB (tl).
AlccW AlccW(21)
Погрешности измерения в плоскости
А1ь1-1
AXY
xy
макс из Alac, Albd,
AI.V, (22)
AXZxz макс ИЗ Alad , Alad , Albc .
А1ь1с(23)
AYZyz - макс из Alab , Ala ь, Aid с, Ald1c(24)
Погрешность измерения в пространстве
AXYZxyz макс из , Ala c, Albd1,
(25)
Пояснения к формулам (1) - (25)
«x, / xXz-углы поворота «,/3 ,.,,} .
подвижной измерительной каретки вокруг соответствующих координатных осей (см, фиг.) при перемещении ее вдоль координатных осей х, хz;
AYX, AZx AYZ - отклонения по
координате Y, Z, .... Y от прямолинейности движения каретки Х,Х, ..,, Z;
AWxy, AWxz, AWyz - отклонения от перпендикулярности движения кареток X и Y, X и Z, Y и Z;
Ахх, A Yy, AZZ - norpeiunocTn по координате X, Y, Z измерения по оси X, Y, Z;
AXYxy, AXZxz, AYZyz - суммарные погрешности по координатам X,Y, X,Z, Y,Z измерения в плоскости XY, XZ, YZ;
AXYZxyz - суммарная погрешность по координатам X,Y,Z измерения в пространстве XYZ;
ZA(O), YK(I), ... - значение по координате Z, Y,... точки Л, К,.... измеренной при помощи наконечников о, t,...;
IEE N, IHH(OO), ... - расстояние между
точками Е и Е , Н и Н которые измерены
при помощи наконечников t и s, о и о,...;
IAB. Ut- номинальное расстояние между точками Л и В, s и t, рапное const;
ЛУкЦо), AZA15(r), - отклонение по координате Y, Z, ... от прямолинейности движения соответствующей каретки на участке KL, ADизмеренное наконечником о, г,...;
AWEHia(oo),... - отклонение от перпендикулярности движения соответствующих кареток на участках ЕЙ и КЦ измеренных при помощи наконечников оно соответственно;
Alac. АЬ С. ... -отклонения расстояния между двумя вычислительными точками а и с, о1 и с
Формулы (1) - (25) являются наиболее обобщенными. На практике в зависимости от метрологических требований, предъявляемых к КИМ, можно пользоваться более уп- рощепными формулами. Однако точность и достоверность получения результатов при этом снижается.
Так, например, «х(см. (1)) можно вычисяять по формулам
«X
CZA(O) -l-zc(o)(o) -bzp(o)
LAD
или
tfx
2A(Q + Zcfp) 1-IZB Cp) +Zp(r)
LAB
и другим.
Кроме того, если метрологические требования, предъявляемые к КИМ, невысокие
и поверитель в связи с этим использует упрощенные формулы, то случае некоторые точки можно измерять не всеми доступными наконечниками. Производительность контроля при этом возрастает.
Таким образом предлагаемый способ позволяет определить раздельно как минимум 25 основных погрешностей КИМ.
В отличие от прототипа, при помощи которого можно определить только б основ-
ных погрешностей, предлагаемый способ значительно повышает информативность определения погрешностей КИМ, что позволяет получить более достоверную информа- цию о состояний КИМ и принять
своевременные меры по корректировке необходимых параметров.
Формула изобретения Способ определения погрешностей трехкоординатной измерительной машины,
заключающийся н том, что на рабочем столе машины вдоль координатных осей ориентируют параллелепипед, измеряют при помощи пяти взаимно перпендикулярных наконечников измерительной головки отделы.ые его точки, при этом определяют раздельно метрологические и технологические погрешности, отличающийся тем, что, с целью повышения достоверности, располагают измерительные точки на кэж-
дой стороне параллелепипеда вблизи его углов по четыре на каждой стороне, сканируют наконечниками не менее трех взаимно перпендикулярных поверхностей параллелепипеда и измеряют каждым из пяти перпендикулярных наконечников координаты
точек, доступные для соответствующего наконечника, загем определяют уравнения каждой стороны параллелепипеда и координаты точек их пересечения, а погрешности определяют на основе полученных результатов измерения.
| Способ определения погрешностей измерения перемещений подвижных органов координатно-измерительной машины | 1987 |
|
SU1420339A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
