Изобретение относится к машиностроению и может найти применение в манинуляторах и промышленных роботах.
Цель изобретения - расширение функциональных возможностей манипулятора за счет обхода препятствий.
На чертеже схематически изображен предлагаемый манипулятор.
Манипулятор содержит кривоп1ип 1 и шатун 2, основное коромысло 3 и стойку 4, длины которых соответственно равны и связашз шарнирами, а также упор 5.
Основное коромысло 3 жестко связано с направляющей 6. Шток 7 установлен с возможностью перемеш.ения вдоль направляющей 6. На стойке 4 установлено дополнигельное коромысло 8, выполненное в виде лфугого элемента и связанное с одним конI.OM штока 7, а на другом конце потока 7 ;т;1змепден схват 9.
Механизм манипулятора работает следуюплим образом.
При вращении криво1нипа 1 движение передается через шатун 2 на основное коромысло 3. Упор 5 ограничивает колебательное движение основного коромысла 3, обеспечивая кинематически точную остановку последнего. При повороте основного коромысла 3, а следовательно, и направляющей 6 изм ляется положение оси штока 7, который при этом, взаимодействуя с дополнительным коромыслом 8, перемещается вдоль направляющей 6. Таким образом, шток 7 со схватом 9 совершает сложное движение.
При ограничении движение штока 7, например, случайным препятствием упругость дополнительного коромысла 8 позволяет после обхода препятствия продолжить перемещение штока по заданному закону движения.
Формула изобретения
Манипулятор, содержащий стойку, кривошип, шарнирно связанный со стойкой, шатун и упор, периодически взаимодействующий с основным коромыслом, отличающийся тем, что, с целью расширения функциональных возможностей за счет обхода препятствий, он снабжен дополнительным коромыслом и направляющей, жестко связанной
с основным коромыслом, штоком, имеющим возможность перемещения вдоль направляющей, причем на одном конце штока размещен схват, а на противоположном - дополнительное коромысло, шарнирно связанное со стойкой и выполненное в виде упругого элемента.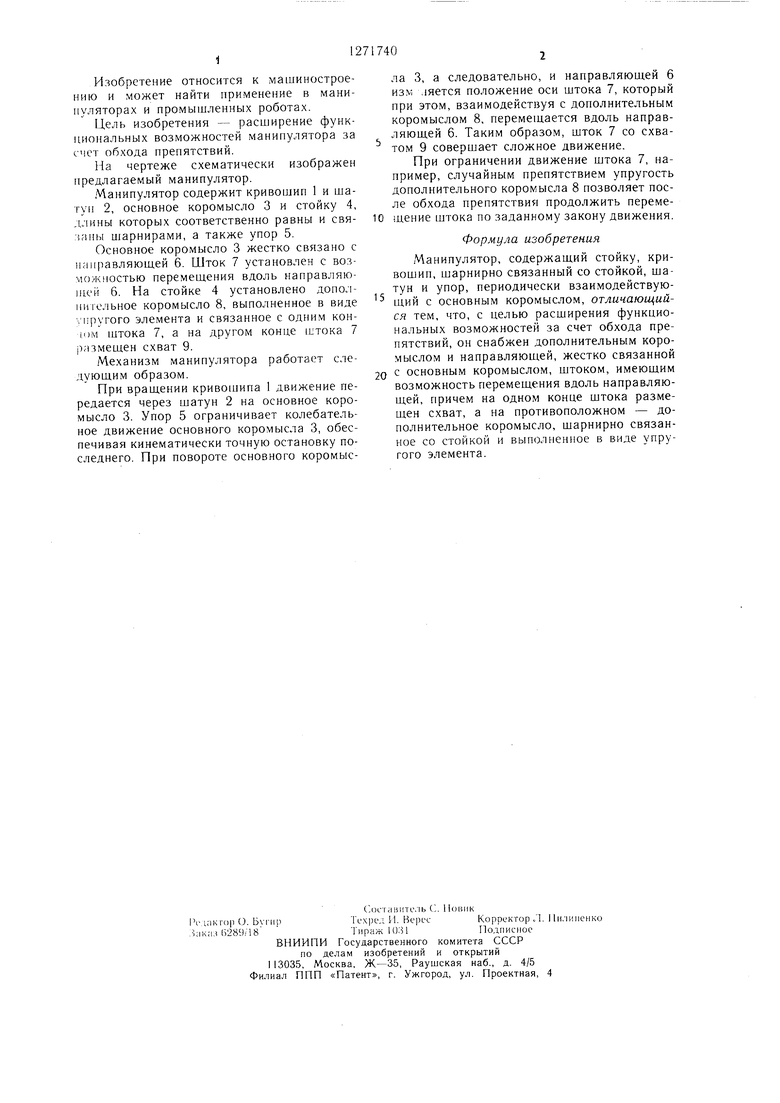
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнирно-рычажный механизм с двумя выстоями | 1989 |
|
SU1629647A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356726C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| Манипулятор | 1986 |
|
SU1435363A1 |
| ДВУХУРОВНЕВЫЙ МАНИПУЛЯТОР С ЗАМКНУТОЙ КИНЕМАТИЧЕСКОЙ ЦЕПЬЮ | 2013 |
|
RU2532751C2 |
| Манипулятор | 1985 |
|
SU1281400A1 |
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| Автооператор | 1991 |
|
SU1799726A1 |
| Шарнирно-рычажный механизм переменной структуры | 2017 |
|
RU2655567C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333827C1 |
Изобретение относится к машиностроению и может найти применение в манипуляторах и промышленных роботах. Цель изобретения - расширение функциональных возможностей манипулятора за счет обхода препятствий. При вращении кривошипа 1 движение передается через шатун 2 на дополнительное коромысло 3. Упор 5 ограничивает колебательное движение основного коромысла 3, обеспечивая кинематически точную остановку последнего. При повороте основного коромысла 3, а следовательно, и направляюш,ей 6 изменяется положение оси штока 7, который при этом, взаимодействуя с дополнительным коромыслом 8, перемешается вдоль направляюш,ей 6. Таким образом, шток 7 со схватом 9 совершает сложное движение. При ограничении движения штока 7, например, случайным препятствием упругость дополнительного коромысла 8 позволяет после обхода препятствия продолжить перемещение штока по заданному закону движения. 1 ил. i (Л ьо 4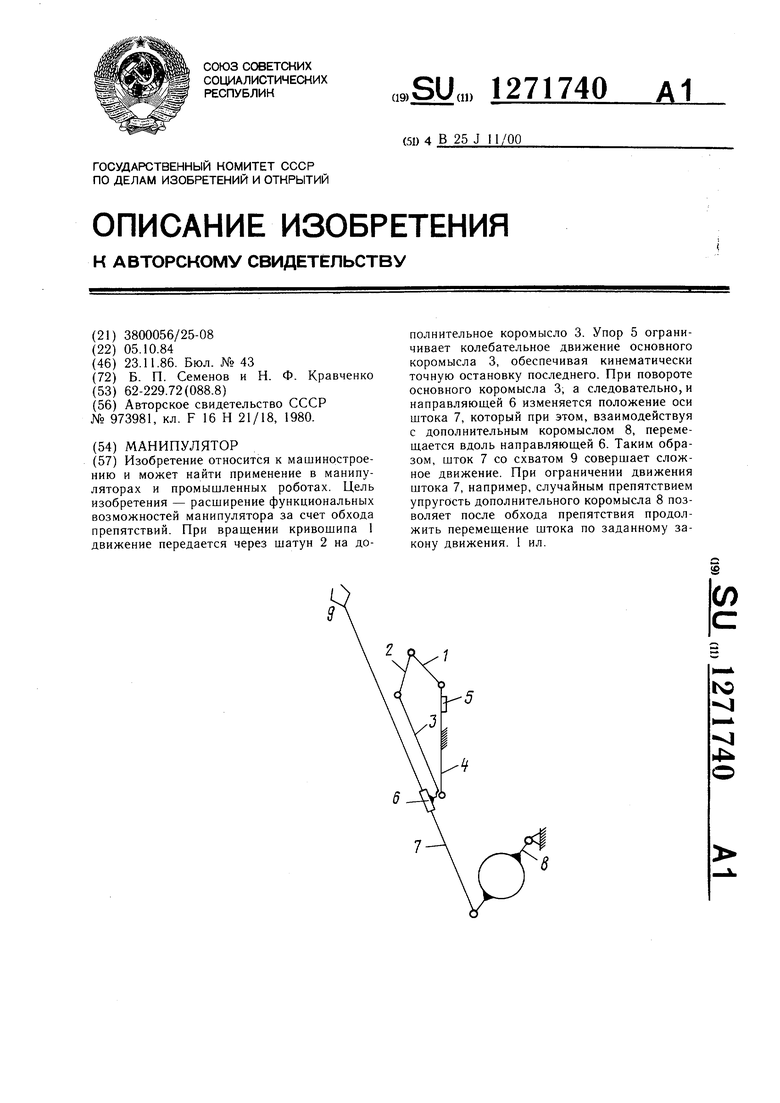
| Шарнирный механизм | 1980 |
|
SU973981A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
