ч 15
оо
СП СО 0
САд
. iPut. f
Изобретение относится к вспомогательному оборудованию штамповочного I производства, а именно, к манипуляторам, применяемым для подачи в рабочую зону штучных заготовок и удаления отштампованных деталей.
Цель изобретения - расширение функ циональных возможностей манипулятора |за счет обеспечения возможности расширения зоны, обслуживания пресса,
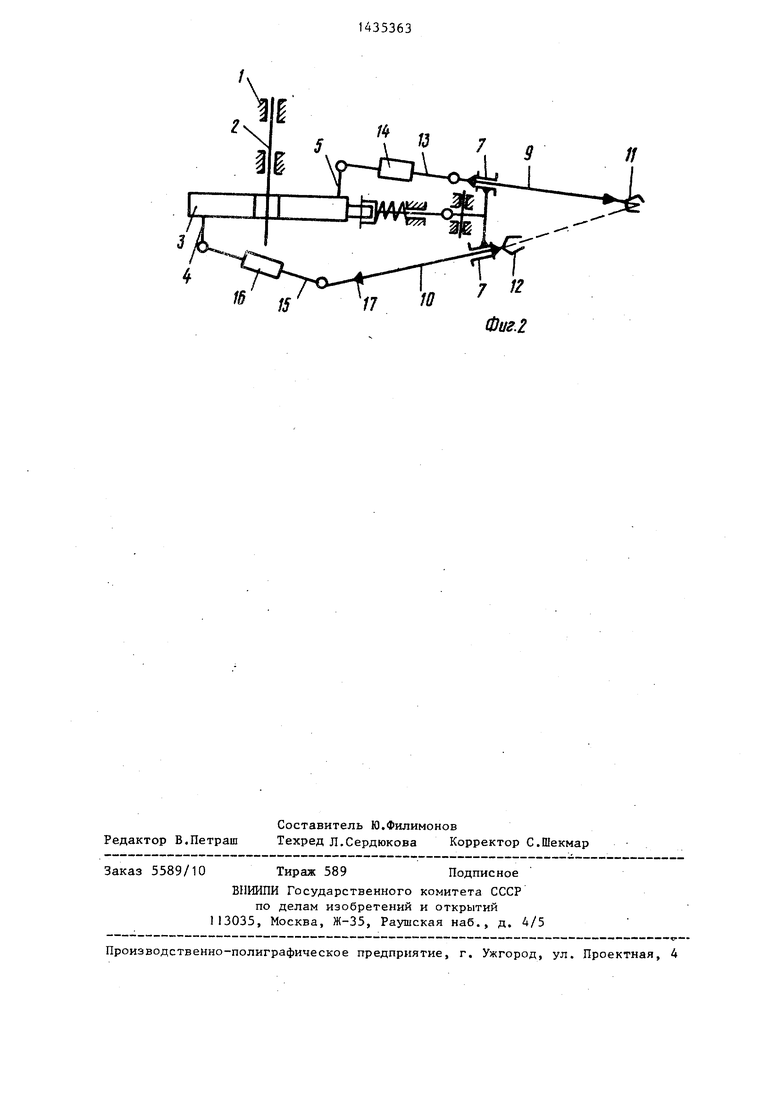
На фиг. 1 изображена схема манипулятора, изометрия; на. фиг, 2 - то же, вид в плане.
Манипулятор содержит корпус 1, в котором смонтирован приводной вал 2, на котором закреплен кулачок 3 и два диаметрально расположенных кривошипа 4 и 5 с регулируемым радиусом их расположения относительно оси вала 2. На корпусе 1 также установлен шарнир- но связанный с ним двуплечий рычаг 6, на одном плече которого размещены направляющие 7, а второе его плечо шар- нирно связано с толкателем 8, подпру жиненным относительно корпуса 1 и смонтированным с возможностью взаимодействия с кулачком 3, В направляющих 7 с возможностью поступательного перемещения смонтированы механические руки 9 и 10 со схватами 11 и 12. Рука 9 связана с кривопшпом 5 с помощью шатуна 13, выполненного составным и снабженным упругим элементом 14. Рука 10 связана с кривошипом 4 с помо- |щью шатуна 15 с упругим элементом 16., | Йеханические руки 9 и 10 снабжены Iрегулируемыми упорами 17. I Манипулятор установлен около об-- служивающего оборудования, например кривошипного пресса.
Манипулятор работает следующим образом.
При вращении приводного вала 2 кривошип 5 через шатун 13 перемещает механическую руку 9 в рабочую зону пресса. Одновременно с этим кривошип 4 через шатун 15 перемещает механическую руку 10 в направлении от пресса к магазину заготовки (не показан). При наезде регулируемых упоров 17 на направляющие 7 поступательное перемещение механических рук 9 и 10 прекращается. При дальнейшем вращении кулачка 3 поворачивается рычаг 6, схват 11 опускается и захватывает отштампованную деталь, а схват 12 опускается и захватывает заготовку из ма
0
5
0
5
0
5
0
5
газина. Наличие на шатунах упругих элементов 14 и 16 позволяет осуществлять указанные вертикальные перемещения схватов при неподвижных в радиальном направлении механических руках, что повышает надежность работы.
Дальнейшее вращение приводного ва ла обеспечивает подъем схвата 11, перемещение механической руки 9 с деталью в направлени от пресса до наезда второго расположенного на ней регулируемого упора 17 на направляющие 7, разжим схвата и сброс детали в тару. Одновременно с этим схват 12 с заготовкой поднимается, механическая рука 10 перемещается в направлении к прессу до наезда второго расположенного на ней регулируемого упора на направляющие 7. Далее схват 12 опускается и укладывает заготовку в рабочую зону пресса. После этого осуществляется подъем схватов 11 и 12 и перемещение механических рук в исходное положение. На этом цикл работы манипулятора заканчивается.
Формула изобретения
Манипулятор, содержащий корпус, направляющую, шарнирно связанную с корпусом, механическую руку со схватам, размещенную в указанной направляющей, и приводной вал с закрепленными на. нем кулачком, кинематически связанным с направляющей посредством толкателя, и кривошипом, связанным с механической рукой посредством шатуна с упругим элементом, отличающийся тем, что, с целью расширения функциональных возможностей за счет расширения зоны обслуживания, он снабжен шарнирно связанным с корпусом двуплечим рычагом, дополнительной направляющей, дополнительным кривошипом с индивидуальным шатуном, закрепленным на приводном валу диаметрально противоположно основному кривошипу, и дополнительной механической рукой, связанной с инди- , видуальным шатуном дополнительного кривошипа и размещенной в дополнительной направляющей, при этом основная и дополнительная направляющие смонтированы на одном из плеч двуплечего рычага, а толкатель расположен с возможностью взаимодействия с вторым плечом двуплечего рычага.
11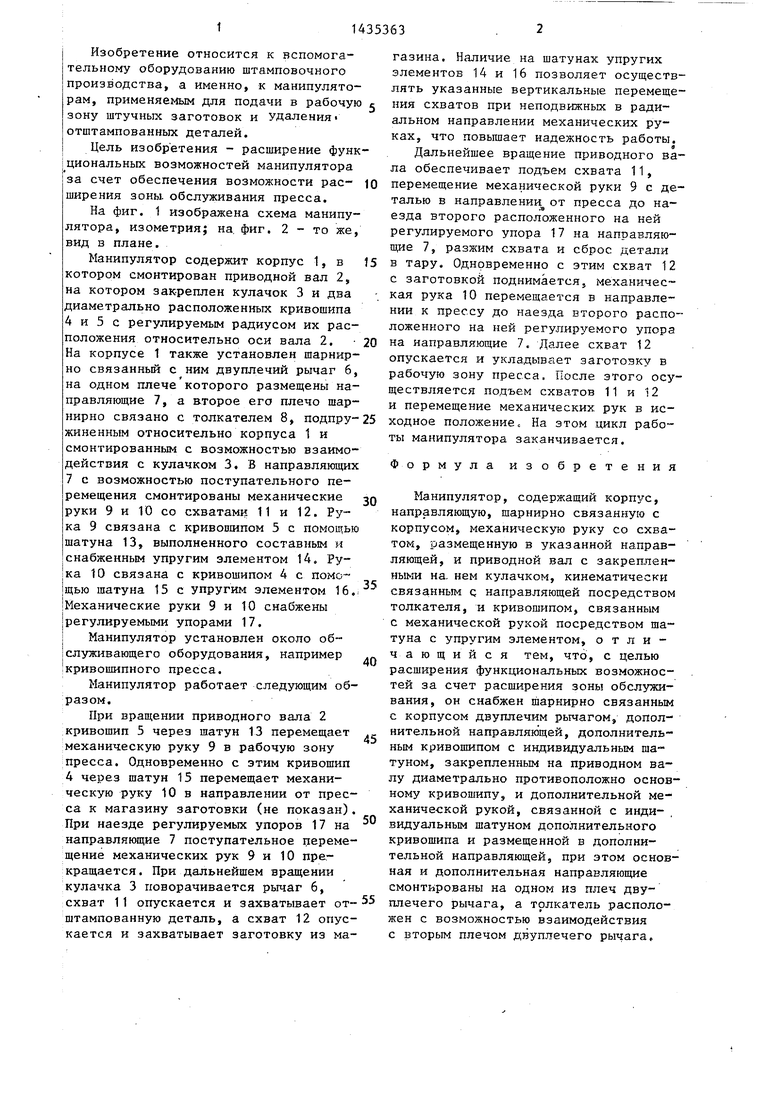
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1060465A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Устройство для подачи материала в рабочую зону пресса | 1987 |
|
SU1488075A1 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| Манипулятор | 1986 |
|
SU1328187A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Робот к листоштамповочному прессу | 1978 |
|
SU795935A1 |
| СПОСОБ РЕГУЛИРОВКИ НИЖНЕГО ВЫТАЛКИВАТЕЛЯ ПРЕССА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2087318C1 |
Изобретение относится к области машиностроения, в частности к автоматизации загрузки-разгрузки технологического оборудования, и может быть использовано для подачи, например, в рабочую зону пресса штучных заготовок и удаления отштампованных дета лей. Цель - расширение функциональных возможностей манипулятора за счет обеспечения возможности расширения зоны обслуживания. Манипулятор состоит из смонтированного в корпусе 1 приводного вала 2, на котором закреплены кулачок 3 и два кривошипа 4 и 5. На корпусе также установлен двуплечий рычаг 6, на одном плече которого размещены направляющие 7, а второе плечо связано с толкателем 8. В направляющих 7 с возможностью поступательного перемещения смонтированы механические руки 9 и 10 со схватами 11 и 12. Одна механическая рука осуществляет загрузку заготовок в оборудование, а другая производит удаление отштампованных деталей из пресса. Руки связаны с кривошипами с помощью шатунов 13 и 15, выполненных составными и снабженными упругими элементами 14 и 16. Механические руки снабжены регулируемыми упорами 17. 2 ил. «е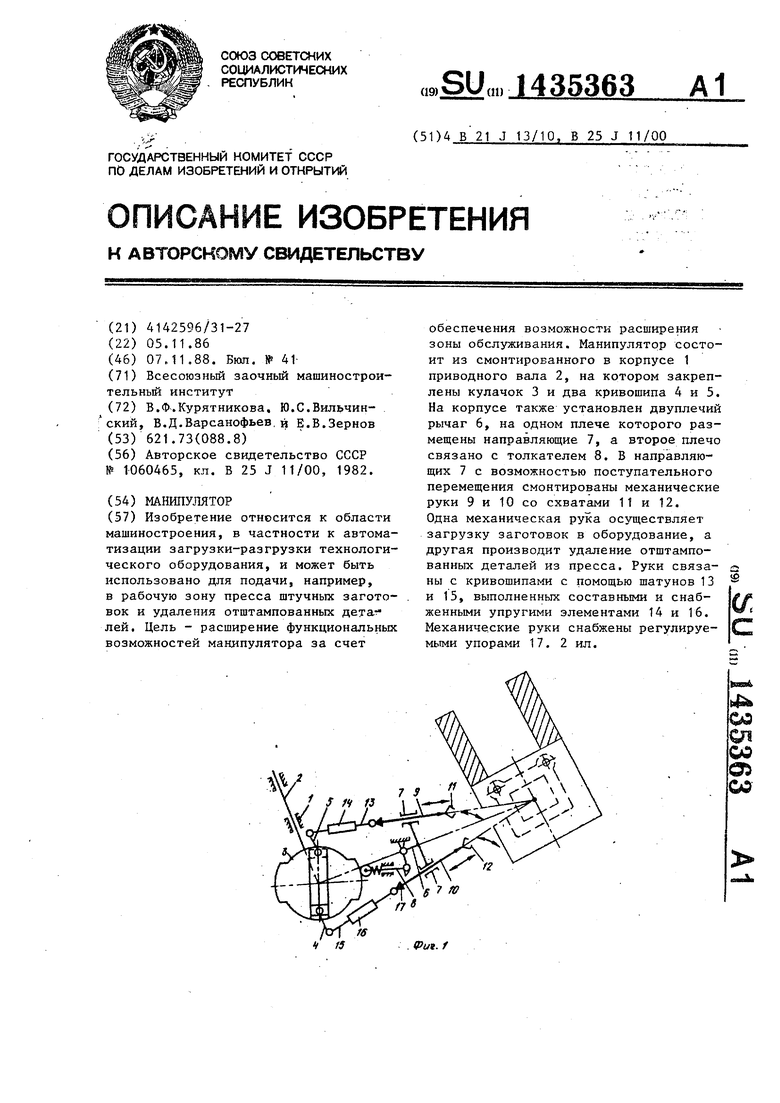
| Манипулятор | 1982 |
|
SU1060465A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
