Предлагаемое изобретение относится к устройствам, которые применяются для выполнения вспомогательных операций при обслуживании машин, станков, прессов и устройств различного назначения. Манипуляторы, имитирующие определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис.а).
Основным недостатком устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами - автоматами в линиях высокой производительности.
Известно также устройство типа «рука» для передачи изделий, выполненное в виде комбинированного механизма, содержащего передаточный механизм в виде кривошипно-коромыслового механизма с выходным звеном, исполнительный механизм с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий и шарнирно связаны с выходным звеном передаточного механизма, и привод (патент РФ №2193963, опубл. в БИПМ, 2002. - №34 - прототип). Данное устройство является средством того же назначения, что и предлагаемое изобретение.
Основным недостатком прототипа является криволинейность траектории движения выходных звеньев исполнительного механизма с губками для захвата изделий. Это нередко снижает эффективность применения таких устройств для выполнения операций между машинами в технологических линиях, поскольку приводит к необходимости уменьшения скорости движения выходных звеньев при выполнении рабочих ходов, т.е. при переносе изделий от машины к машине. В результате уменьшается частота повторения рабочих циклов и производительность.
Задачей настоящего изобретения является расширение технологических возможностей использования манипулятора и повышение производительности.
Решение поставленной задачи достигается тем, что в манипуляторе, содержащем передаточный механизм с выходным звеном, исполнительный механизм с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий и шарнирно связаны с выходным звеном передаточного механизма, привод и стойку, передаточный механизм выполнен в виде многозвенного шарнирно-рычажного механизма, который включает базовый кривошипно-коромысловый механизм и кинематически связанное с коромыслом базового механизма выходное звено, последнее выполнено в виде толкателя, при этом упомянутая кинематическая связь содержит ползун, шарнирно связанный с коромыслом и сопряженный с направляющей рамкой, жестко закрепленной на выходном звене, а ведущим звеном исполнительного механизма является выходное звено передаточного механизма.
Шарнирная связь ползуна с коромыслом содержит палец, жестко закрепленный на ползуне, а направляющая рамка для ползуна жестко закреплена на свободном конце выходного звена перпендикулярно продольной оси выходного звена.
Выходное звено передаточного механизма смонтировано в неподвижных направляющих, жестко связанных со стойкой.
Передаточный механизм удовлетворяет структурной формуле кинематической цепи
W=3·n-2p5-p4=3·5-2·7=1,
где W - степень подвижности механизма, W=1;
n - число подвижных звеньев, n=5;
p5 - число низших кинематических пар, р5=7;
р4 - число высших кинематических пар, р4=0.
Связь передаточного и исполнительного механизмов удовлетворяет структурной формуле кинематической цепи
W=3·n-2p5-p4=3·6-2·8-1=1,
где W=1; n=6; p5=8; р4=1.
В предложенном манипуляторе передаточный механизм выполнен в виде многозвенного шарнирно-рычажного механизма с выходным звеном, совершающим движение по прямолинейной траектории, при этом кинематическая связь выходного звена с коромыслом базового механизма позволяет обеспечивать (в зависимости от длины плеча коромысла) практически любой ход выходного звена. Это расширяет технологические возможности использования манипулятора в линиях с различной компоновкой оборудования. Выходное звено передаточного механизма является ведущим звеном исполнительного механизма. Этим обеспечивается поступательное движение выходных звеньев исполнительного механизма в интервалах их прямого (с изделием) и обратного (без изделия) ходов. Поступательное движение выходного звена генерирует поворотное движение выходных звеньев исполнительного механизма путем взаимодействия последних с фигурными пазами в теле неподвижного кулачка, при этом соответствующие текущие положения выходных звеньев формируют разжатое или сжатое положения губок.
Использование пальца для шарнирной связи ползуна с одним из плеч коромысла базового механизма и жесткое крепление пальца на ползуне является наиболее простым и технологичным решением.
Компоновка выходного звена (ползуна) передаточного механизма в неподвижных направляющих представляет собой наиболее простую и надежную кинематическую связь звеньев.
Передаточный механизм в системе предлагаемого манипулятора отличается от передаточного механизма в системе прототипа числом звеньев и кинематических пар, при этом работоспособность предложенной структуры кинематической цепи подтверждается формулой Чебышева.
Система кинематической связи в составе передаточного и исполнительного механизмов манипулятора также удовлетворяет условию работоспособности.
Заявляемый манипулятор отличается от прототипа сочетанием конструктивных элементов и характером связи между ними, обеспечивающими расширение технологических возможностей для использования манипулятора и повышение производительности.
Предлагаемый манипулятор для передачи изделий поясняется чертежом, на котором представлена его кинематическая схема.
Манипулятор для передачи изделий содержит передаточный механизм 1, исполнительный механизм 2 с губками 3 для захвата изделии и привод, последний на чертеже не показан.
Механизм 1 выполнен в виде многозвенного шарнирно-рычажного механизма, который включает базовый кривошипно-коромысловый механизм 4 в составе кривошипа 5, шатуна 6, двуплечего коромысла 7 (плечи А и Б), выходное звено 8, выполненное в виде толкателя и кинематически связанное с плечом Б коромысла. Кинематическая связь выходного звена с плечом Б коромысла содержит ползун 9, шарнирно связанный с упомянутым плечом посредством пальца 10 и сопряженный с направляющей рамкой 11, последняя расположена перпендикулярно продольной оси выходного звена и жестко закреплена на конце звена. Толкатель 8 смонтирован в направляющих 12, жестко связанных со стойкой.
Исполнительный механизм 2 выполнен в виде рычажно-кулачкового механизма, он включает ведущее звено, которым является толкатель 8 передаточного механизма, выходные звенья 13 и 14 с губками 3 для захвата изделий и неподвижный кулачок - копир 15 с фигурными пазами 16 и 17 для сопряжения с выходными звеньями. На свободном конце толкателя 8 жестко закреплен палец 18 для шарнирной связи с выходными звеньями. На свободных концах выходных звеньев смонтированы ролики 19 и 20 для сопряжения с фигурными пазами 16 и 17 копира 15. Поворотное движение выходных звеньев на пальце 18 осуществляется по закону, определяемому рабочими профилями фигурных пазов 16 и 17.
Губки 3 выполнены по форме передаваемых изделий и закреплены на выходных звеньях жестко, но разъемно. Границы прямого и обратного ходов выходных звеньев соответствуют позициям «схват изделия» и «выдача изделия». Ролики выходных звеньев взаимодействуют с фигурными пазами копира 15 как при рабочем, так и при холостом ходах.
Манипулятор для передачи изделий работает следующим образом.
При работе привода вращение кривошипа 5 передаточного механизма 1 преобразуется посредством системы промежуточных звеньев в сложное движение выходных звеньев 13 и 14 с губками 3 для захвата изделий. Выходные звенья совершают поступательное движение вместе с толкателем 8 и возвратно-поворотное движение относительно толкателя с выстоями определенной продолжительности.
На границах прямого и обратного ходов выходные звенья занимают положение, при котором губки оказываются разжатыми. В позиции «схват изделия» в разжатые губки подается объект манипулирования. В момент начала рабочего хода ролики 19 и 20, взаимодействуя с фигурными пазами 16 и 17 копира 15, обеспечивают такое положение выходных звеньев 13 и 14, при котором губки сжимаются. При рабочем ходе губки контактируют с изделием по большей части его периметра, надежно удерживая изделие, переносимое из одной позиции в другую.
В интервалах прямого и обратного ходов палец 18, несущий выходные звенья с губками, перемещается по прямолинейной траектории - траектории движения толкателя 8.
В позиции «выдача изделия» губки разжимаются, перестают удерживать изделие и последнее выводится из манипулятора. При обратном ходе (без изделия) губки также занимают сжатое положение, поскольку ролики выходных звеньев взаимодействуют с теми же фигурными пазами, что и при рабочем ходе.
Последующие рабочие циклы выполняются аналогичным образом.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333828C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2005 |
|
RU2284262C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2243882C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2005 |
|
RU2303519C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2344031C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265510C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
Манипулятор относится к устройствам, которые применяются при обслуживании машин, станков, прессов и другого оборудования. Он содержит передаточный механизм, исполнительный механизм с губками для захвата изделий и привод. Передаточный механизм выполнен в виде многозвенного шарнирно-рычажного механизма, который включает базовый кривошипно-коромысловый механизм и выходное звено - толкатель, кинематически связанный с коромыслом базового механизма. При этом кинематическая связь включает ползун, шарнирно связанный с коромыслом и сопряженный с направляющей рамкой, жестко закрепленной на толкателе. Исполнительный механизм содержит ведущее звено, которым является толкатель передаточного механизма, выходные звенья с губками для захвата изделий и неподвижный кулачок с фигурными пазами для взаимодействия с роликами выходных звеньев. Выходные звенья шарнирно связаны с толкателем посредством пальца, жестко закрепленного на свободном конце толкателя. Манипулятор отличается повышенной производительностью и большими технологическими возможностями его использования. 4 з.п. ф-лы, 1 ил.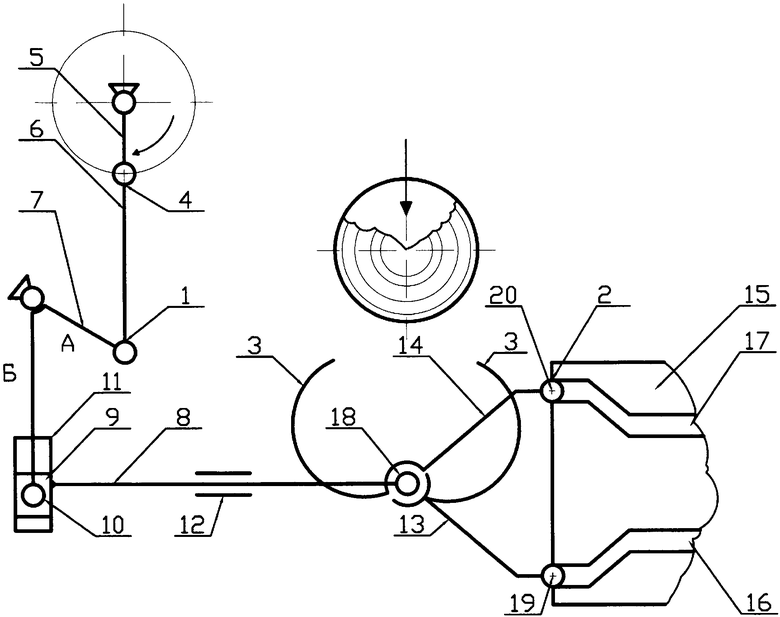
W=3·n-2p5-p4=3·5-2·7=1,
где W - степень подвижности механизма, W=1;
n - число подвижных звеньев, n=5;
р5 - число низших кинематических пар, р5=7;
р4 - число высших кинематических пар, р4=0.
W=3·n-2p5-p4=3·6-2·8-1=1,
где W=1; n=6; р5=8; р4=1.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2193963C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224638C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217297C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2247021C1 |

