tc
1C
со
Изобретение относится к числовому программному управлению и может найти применение в автоматических системах резьбонарезных, зубообрабатывающих и намоточных станков, а также роботов, обслуживающих конвейеры и поточные линии.
Цель изобретения - повышение точности и быстродействия интерполятора.
В отличие от традиционных параметрических интерполяторов предлагаемый позволяет управлять ведомыми координатами X, Y в функции ведущей координаты Z.
В отличие от известных функциональных интерполяторов предлагаемый интерполятор позволяет обеспечить любое соотношение между приращениями в кадре по ведущей и ведомыми координатами, в том числе , AY; ЛХ AY О, но AZ # О, обеспечить высокую равномерность следования импульсов. Кроме того, интерполятор, позволяет учесть фактическое положение ведущей координаты: изменять скорость движения ведомых координат, доводя ее до предельно допустимой, путем соответствующей настройки элемент запаздывания.
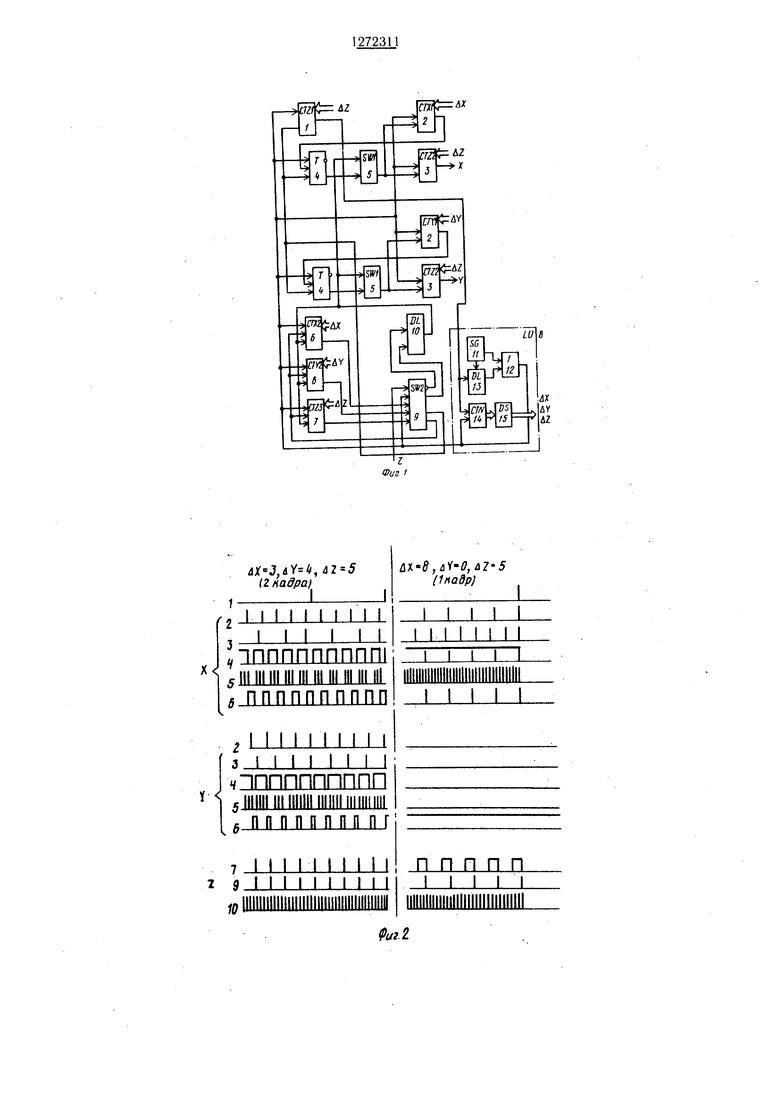
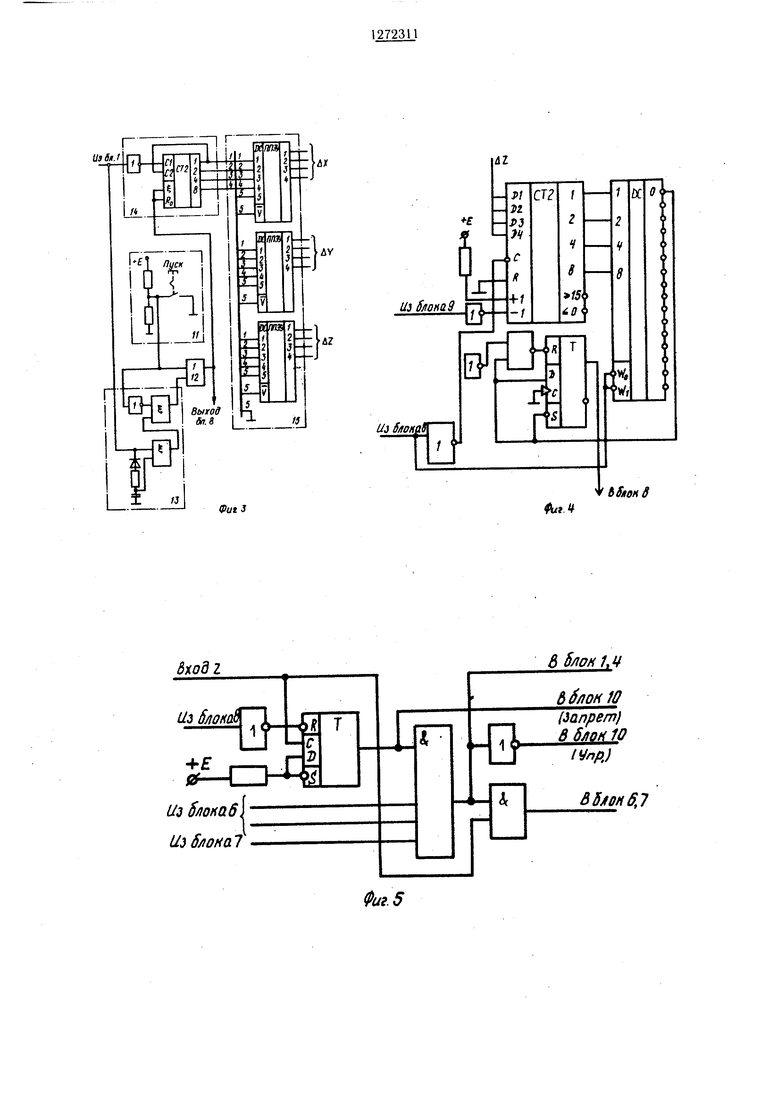
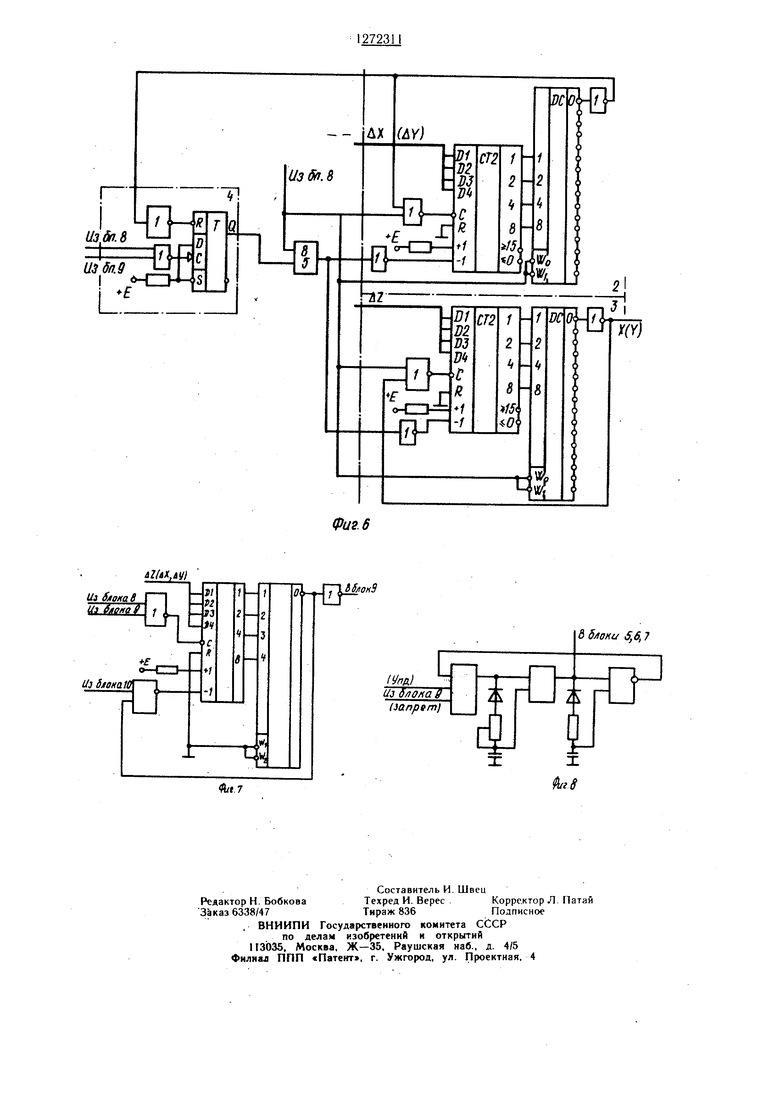
На фиг. I приведена схема интерполятора; на фиг. 2 - временные диаграммы; на фиг. 3 - принципиальная схема, блока управления; на фиг. 4 - схема первого счетчика ведущей координаты; на фиг. 5 - схема второго ключа; на фиг. б - схема триггера, первого ключа, второго счетчика ведущей координаты и счетчика ведомой координаты; на фиг. 7 - схема одного из введенных счетчиков; на фиг. 8 - элемент задержки.
Функциональный интерполятор (фиг. 1) содержит первый счетчик I ведущей координаты, первый счетчик 2 ведомой координаты, второй счетчик 3 ведущей координаты, триггеры 4, первые ключи 5, вторые счетчики 6 ведомых координат, третий счетчик 7 ведущей координаты, блок 8 управления, второй ключ 9 и элемент 10 задержки. В состав блока 8 управления входят пульт П управления, элемент ИЛИ 12, элемент 13 задержки, счетчик 14 кадров и блок 15 памяти.
Основные функции, выполняемые блоками устройства, определяются спецификой управляемого объекта - технологической установкой с ведущей координатой Z и ведомыми координатами X, Y, совершающими программные перемещения в пространстве. Задание на перемещение в кадре координат X, Y поступает с информационной шины блока 8 в счетчики. Скоростью движения ведущей координаты X, Y, Z управляет оператор с внешнего по отнощению к интерполятору пульта. Информация о фактическом положении координаты Z с кмпульсного датчика ее подается в виде последовательности импульсов на управляющий вход второго ключа 9.
Частота импульсов на выходе ключа 9 определяется циклом обнуления счетчиков 6 и 7 и величиной задержки 10 элемента. Число импульсов, поступающих с ведущей координаты,, контролируется счетчиком 1. Ведомые координаты X, Y управляются импульсными последовательностями с выходов вторых счетчиков 3 ведущей координаты в функции положения ведущей координаты. Интерполятор одновременно задает скорости, пропорциональные частоте унитарного кода и приращения АХ, AY, AZ по координатам. Программа управления в блоке 8 содержит информацию об этих приращениях в каждом кадре и кадры программы поочередно вводятся в счетчики. Импульсы обнуления счетчиков служат выходными сигналами, вызывающими обновление их информации. Соотношение AX:AY:AZ в каждом кадре может быть произвольным, исключая (конец программы).
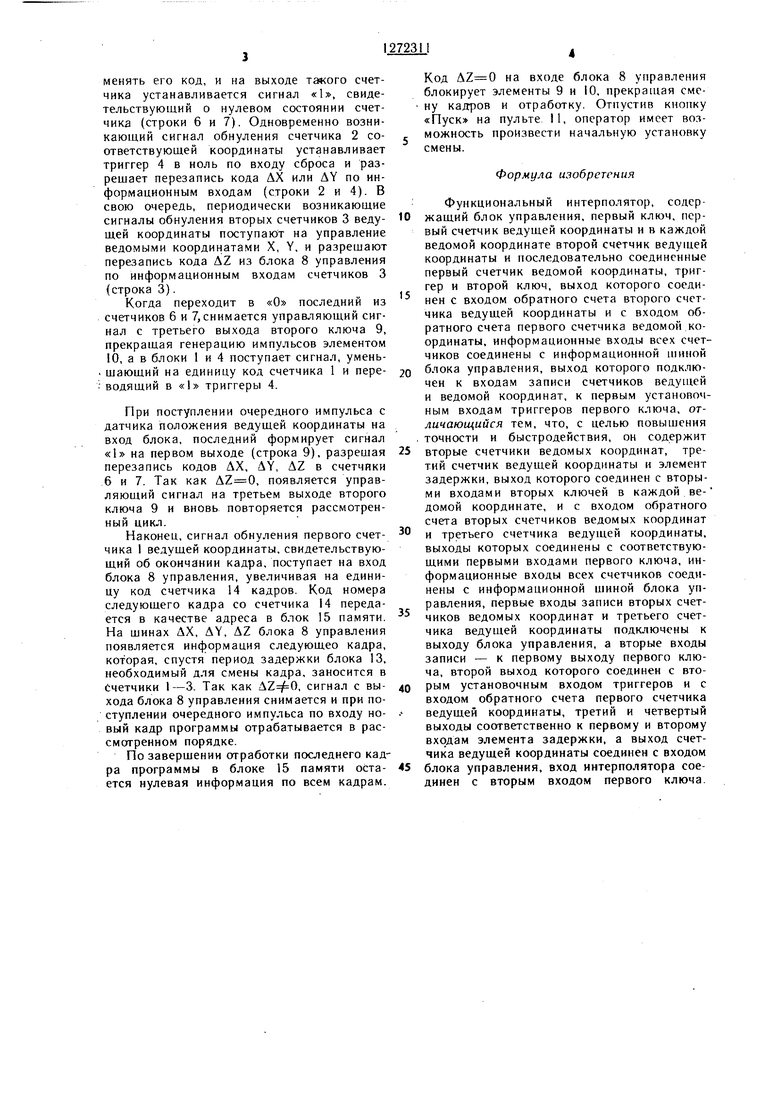
Рассмотрим работу устройства по временным диаграммам (фиг. 2) на примере отработки двух кадров, где AX:AY:AZ 3:4:5, и одного кадра, где AX:AY:AZ 8:0:5. В первых кадрах максимальное перемещение задано по Z - эта координата является ведущей, в последнем максимум имеет место по X по Y запрограммирована стоянка, но Z по-прежнему остается ведущей координатой.
В исходном состоянии контакт «Пуск пульта 11 в блоке 8 управления разомкнут и сигнал «1 с выхода блока 8 управления поступает на первые установочные ВХОДЫ триггеров 4, входы записи счетчиков 1-3, 6 и 7 и вход запрета элемента 40 задержки после инверсии во втором ключе 9. Поэтому с триггеров 4 поступает сигнал «1 на первые ключи 5, в счетчики 1-3, 6 и 7 занесены коды АХ, AY, AZ нулевого кадра из блока 15 памяти, а на выходе элемента 8 и первых двух выходах элемента 10 присутствуют сигналы «О.
При нажатии кнопки «Пуск снимается сигнал с выхода блока 8, а с приходом первого импульса с входа Z открывается элемент 10. Так как состояние хотя бы одного из счетчиков 6 или 7 не равно нулю, на инверсном выходе элемента И 9 присутствует сигнал «1, который спустя период задержки, превыщающий разброс в срабатывании счетчиков 6 и 7, приходит с выхода элемента 10 задержки (строка 10, фиг. 2) на входы обратного счета счетчиков 6 и 7 и через первые ключи 5 - на входы обратного счета счетчиков 2 и 3 (строки 5). Если счетчики 6 и 7 находятся не в состоянии «О, код их уменьшается на единицу, и вновь возникает импульс на выходе элемента 10 задержки. Уменьшается и содержимое счетчиков 2 и 3.
Всякий раз, когда счетчик 6 или 7 обнуляется, импульсы, поступающие из блока 10 на вход обратного счета, прекращают изменять его код, и на выходе такого счетчика устанавливается сигнал «1, свидетельствующий о нулевом состоянии счетчика (строки 6 и 7). Одновременно возникающий сигнал обнуления счетчика 2 соответствующей координаты устанавливает триггер 4 в ноль по входу сброса и разрешает перезапись кода ДХ или ДУ по информационным входам (строки 2 и 4). В свою очередь, периодически возникающие сигналы обнуления вторых счетчиков 3 ведущей координаты поступают на управление ведомыми координатами X, Y, и разрещают перезапись кода Д2 из блока 8 управления по информационным входам счетчиков 3 (строка 3).
Когда переходит в «О последний из счетчиков 6 и 7,снимается управляющий сигнал с третьего выхода второго ключа 9, прекращая генерацию импульсов элементом 10, а в блоки I и 4 поступает сигнал, умень. щающий на единицу код счетчика 1 и пере водящий в «1 триггеры 4.
При поступлении очередного импульса с датчика положения ведущей координаты на вход блока, последний формирует сигнал «1 на первом выходе (строка 9), разрещая перезапись кодов ДХ, ДУ, AZ в счетчики 6 и 7. Так как , появляется управляющий сигнал на третьем выходе второго ключа 9 и вновь повторяется рассмотренный цикл.
Наконец, сигнал обнуления первого счетчика I ведущей координаты, свидетельствующий об окончании кадра, поступает на вход блока 8 управления, увеличивая на единицу код счетчика 14 кадров. Код номера следующего кадра со счетчика 14 передается в качестве адреса в блок 15 памяти. На щинах ДХ, ДУ, Д7 блока 8 управления появляется информация следующео кадра, которая, спустя период задержки блока 13, необходимый для смены кадра, заносится в счетчики 1-3. Так как , сигнал с выхода блока 8 управления снимается и при поступлении очередного импульса по входу новый кадр программы отрабатывается в рассмотренном порядке.
По заверщении отработки последнего кадра программы в блоке 15 памяти остается нулевая информация по всем кадрам.
Код на входе блока 8 управления блокирует элементы 9 и 10, прекращая сме ну кадров и отработку. Отпустив кнопку «Пуск на пульте II, оператор имеет возможность произвести начальную установку смены.
Формула изобретения
Функциональный интерполятор, содержащий блок управ тения, первый ключ, первый счетчик ведущей координаты и в каждой ведомой координате второй счетчик ведущей координаты и последовательно соединенные первый счетчик ведомой координаты, триггер и второй ключ, выход которого соединен с входом обратного счета второго счетчика ведущей координаты и с входом обратного счета первого счетчика ведомой координаты, информационные входы всех счетчиков соединены с информационной шиной блока управления, выход которого подключен к входам записи счетчиков ведущей и ведомой координат, к первым установочным входам триггеров первого ключа, отличающийся тем, что, с целью повышения точности и быстродействия, он содержит вторые счетчики ведомых координат, третий счетчик ведущей координаты и элемент задержки, выход которого соединен с вторыми входами вторых ключей в каждой ведомой координате, и с входом обратного счета вторых счетчиков ведомых координат и третьего счетчика ведущей координаты, выходы которых соединены с соответствующими первыми входами первого ключа, информационные входы всех счетчиков соединены с информационной щиной блока управления, первые входы записи вторых счетчиков ведомых координат и третьего счетчика ведущей координаты подключены к выходу блока управления, а вторые входы записи - к первому выходу первого ключа, второй выход которого соединен с вторым установочным входом триггеров и с входом обратного счета первого счетчика ведущей координаты, третий и четвертый выходы соответственно к первому и второму входам элемента задержки, а выход счетчика ведущей координаты соединен с входом блока управления, вход интерполятора соединен с вторым входом первого ключа.
,Z (2 )
u)i.-8,,u2-5 11надр}
1-
гП
Tl&4d
uf
&l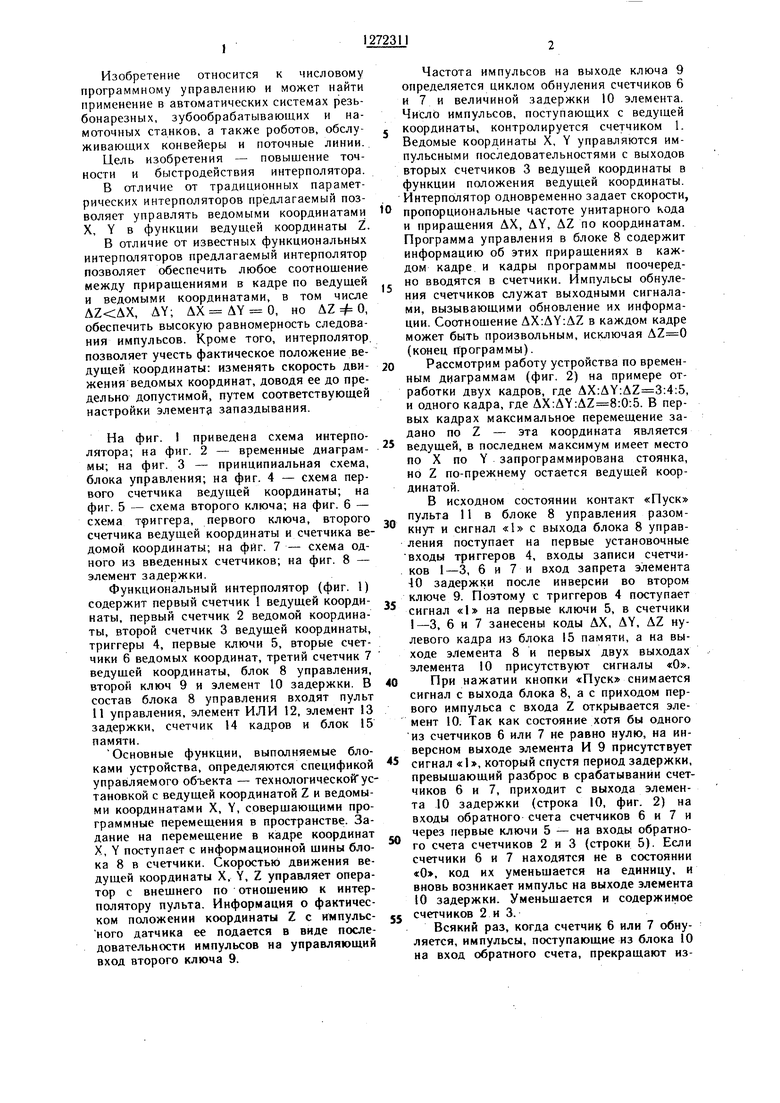
| название | год | авторы | номер документа |
|---|---|---|---|
| Функциональный интерполятор | 1984 |
|
SU1168900A1 |
| Функциональный интерполятор | 1986 |
|
SU1383301A1 |
| Программное задающее устройство | 1981 |
|
SU991376A1 |
| Функциональный интерполятор | 1985 |
|
SU1305639A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| СПОСОБ НАВЕДЕНИЯ ГРУППЫ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И СИСТЕМА ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2451317C1 |
| Устройство для автоматического управления (его варианты) | 1984 |
|
SU1249481A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1631518A1 |
Tfi
и
-
из S/iOHuS
6п. 8 | -1-13
Фиг 3
ил S/foni
Ыйон д
tt Sxodz из блока 6 Uy блона 7
Фиг. 5 Вблшпм ВблонбЛ
Lf3 Sn. 8
Т
из..8
U3Sn.9
L
,луу
fl/e.7
MioxS
| СПОСОБ КЛОНАЛЬНОГО МИКРОРАЗМНОЖЕНИЯ СИРЕНИ IN VITRO | 2010 |
|
RU2457669C2 |
| .кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Функциональный интерполятор | 1984 |
|
SU1168900A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
