(54) ПРОГРАММНОЕ ЗДДАЮЩЕЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Устройство для программного управления | 1984 |
|
SU1255993A1 |
| Устройство для программного управления | 1985 |
|
SU1280571A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| Устройство для числового программного управления станками | 1985 |
|
SU1291928A1 |
| Система для программного управления | 1984 |
|
SU1246053A1 |
| Устройство для программного управления | 1986 |
|
SU1397878A1 |
| Линейный интерполятор | 1976 |
|
SU651318A1 |
| Устройство для программного управления станком | 1979 |
|
SU862119A1 |
| Устройство для задания программы | 1986 |
|
SU1312529A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в многокоординатных системах числового программного управления.
Известно устройство для задания контурной скорости, состоядее из последовательно соединенных управляемого генератора, интерполятора, к выходам координат X и У которого присоединены соответственно преобразователь частота-напряжение и квадратор, причем выходы квадраторов присоединены к входу суммирующего усилителя, выход которого подключен к первому входу вычитающего усилителя, второй вход которого присоединен к задатчику, а выход - к управляювчему входу управлякадего генератора 13.
.. Недостатками этого устройства являются его низкая точность и нестабильность в работе из-за аналоговых элементов, сложность, высокая инерционность и узкая область применения, ограниченная системой ЧПУ с числом коорлинат 2-3.
Известно задающее устройство, состоящее из блока задания скорости, выход которого присоединен к входу интерполятора, выходы которого под- ,
ключены к входам частотомеров, выполненных на первом-четвертом делителях частоты, выходы которых через элементы задержки и элементы И присоединены к входам триггеров, выходы которых подключены к управляющим входам блока задания скорости 2.
Недостатками этого устройства являются большой объем электронного
10 оборудования и сложность технической реализации, а также ограниченность области применения системами ЧПУ с числом координат 2-3. .
Наиболее близким техническим ре15шением к изобретению является задающе устройство., состоящее из последовательно соединенных фотосчитывателя перфоленты, блока ввода, блока задающего генератора со схемой ав20томатического разгона и торможения, блока задания времени отработки кадра , блока счетчика распределителя импульсов, который совместно с блоками координат реализует интерполятор на
25 двоично-десятичном умножителе и центральное устройство управления СЗ.
Недостатком известного устройства является низкая точность, определяемая самим принципом действия интер-
30 поляторов на умножителях, который характеризуется высокой неравномерностью следования импульсов и низким быстродействием, котсчрое определяется как наличием сглаживающих делителей , так и свойством двоично-десятич Ного умножителя уменьшать в десять раз выходную частоту по сравнению с тактовой в случае, если в старшем разряде ;большего из координатных прев ращений имеется единица.i Целью изобретения является .повыше ние точности устройства. Поставленная цель достигается тем что в программное задаюЕоее устройство, содержащее блок управления,, первый выход которого подключен к входа разрешения записи блока задания .эталонной частоты, блока формирования частоты отработки кадра программы и п-координатного линейного интерполя тора, запускающий вход которого coe-v динен с вторым выходом блока управления и с запускающикм входами блока задания эталонной частоты и считывающего блока, подключенного выходом i входу блока распределения информации выходы которого подключены к информа ционным входам блока задания эталон. ной частоты, блока формирования частоты отработки кадра програмкы и .к . п-1 информсщионным входам п-координа НОГО линейного интерполятора, п-1 вУ ходов которого соединены с выходами устройства, а выход сигнала окончани интерполяции - с управляющим входом блока управления, подключенного запу кающим входом к отключающему входу считывающего блока и к одному из вых дов блока распределения информации. Причем выход блока задания эталонной частоты соединен с тактовым входом блока формирования частоты отработки кадра программы, введены первый триг гер, последовательно соединенныегенератор высокой частоты и первый ключ и последовательно соединенные буферный регистр, блок вторых ключей дешифратор, шифратор и рабочий регистр, подключенный выходом к п-му информационному входу п-координатног линейного интерполятора, п-й выход : которого соединен с нулевым входом первого триггера, подключенного единичным входом и выходом соответственно к выходу блока формирования частоты отработки кадра программы и к управляющему входу первого ключа, подсоединенного выходом к тактовому входу п-координатного линейного интерполятора, вход буферного регистра соединен с одним из выходов блока распределения информации, а управляюпвий вход блока вторых ключей - с первым выходом блока управления. Блок управления содержит двухразрядщый регистр сдвига, выходы которо го соединеныС первым и вторым выходами блока, управляющий вход - с выходом генератора импульсов сдвига а установочный вход - с выходом пер вого злемента ИЛИ, подключенного входами к. злементу запуска и к выходам третьего и четвертого ключей,первый вход третьего ключа соединен с запускающим входом блока, с первым входом второго элемента ИЛИ и через , первый -элемент задержки - с нулевцм входом второго триггера, единичный выход которого связан с вторым входом третьего ключа, а единичный вход с элементом предварительной установки и с нулевым входом третьего триггера, единичный выход которого соединен с первым входом четвертого ключа, а единичный вход - с выходом второго . элемента ИЛИ, второй вход которого через второй элемент задержки связан iC управляющим входом блока и с вторым входом четвертого ключа. ; Сущность изобретения заключается в той, что определяется величина, обратная времени отработки кадра следуж)щим образом. Пусть надо отработать некоторые ; перемещения по координатам 4Х, ДУ, AZ, ДА,ДВ, ДС, /4W с контурной скоростью V. Тогда по формуле, определяемой компановкой конкретного станка, для которого осуществляется программирование, определяется модуль пространственного вектора L. в случае декартовой системы координат,это корень квадратный из суммы квад ратов элементарных приращений (в случав использования угловых координат формула несколько усложняется). Затем определяют время отрабйтки кадра, как беличнну , а затем частбту отработки к1адра, как величину , или, г V ЧТО ТО же самое, . . Пусть объем счетчика-распределителя, задействованного в этом кадре, равен 100.000.на него необходимо подать частоту fjy,alOOOOO, или .000 F. В реальных системах используется эта последняя формула, так как ее легко реализовать с помощью обычного двоично-десятичного умножителя. Однако использование интерполятора на двоично-десятичных умножителях при современных требованиях (выходная частота 200 кГц) с учетом коэффициента снижения частоты Is 10 за счет принципа действия интерполят.ора и в 1-16 раз - за счет использования сглаживающих делителей, требует элементов с тактсэвой частотой 200 кГцх х10х16 32 МГц7| что практически неосуществимо. Использование интерполяторов, построенных на принципе оценочной функции, позволяет без снижения точности отказаться от сглаживающих делителей и, следовательно, войти в диапазон тактовых частот 2 МГц,
что допустимо, учитывая быстродействие интегральных элементов (например, серии Kl55-ia Мгц). Но интерполяторы, построенные по принципу оценочной функции,. не.имеют счетчика-распределителя и не содержат внутренней коне- 5 танты. Следовательно, прямое использование формулы «К.Г невозможно (K-const в предыдущем примере 100.000).
Поэтому для объединения преиму- 10 tqecTBa интерполятора, по строе н н.ого .
по методу оценочной функции, и метода задания контурной скорости, что позволяет в 20-16 раз поднять быстродействие многокоординатных сис-15 тем ЧПУ, их точность и расширить область применения и, кроме того, соответствует ГОСТ 20999-75 (функция G 93), в устройства используется интерполятор, основанный на принципе 20 оценочной функции с обратной связью, в ведущую координату которого заносят выбранное программистом число из ряда 10 или 2 {в зависимости от принятой системы счисления) , глни 5aльнo 25 превышающее большее из координатных приращений; заданных в конкретном кадре. Действительно, пусть прирам ние по косч линате Х-ЛХ превосходит все остапьные в данном кадре и равно 95741. шбираем константу .000. Рассчитываем частоту отработки кадра пррхраммы по уже известной формуле %гр 00.000 F и подаем эту частоту ,) на тактовый вход интерполятора с обратной связью. Учитывая равенство частот на тактовом входе и выходе ведущей координаты (основное свойство интерполятора с обратной связью), получим, что за время дл
t на тактовый вход интерполятора
проходат 100.000 импульсов, и, следовательно, кадр программы отработан
за емя требовалось полу-45
чить. Поскольку число К выбирается болы11е наибольшего из приращений, то на один И1 в1ульс по ведущей координате или по любой другой вырабатывается . на более одного импульса и, следова- 50 тельно, дополнительной неравномерное-, ти за счет действия обратной связи не. происходит.
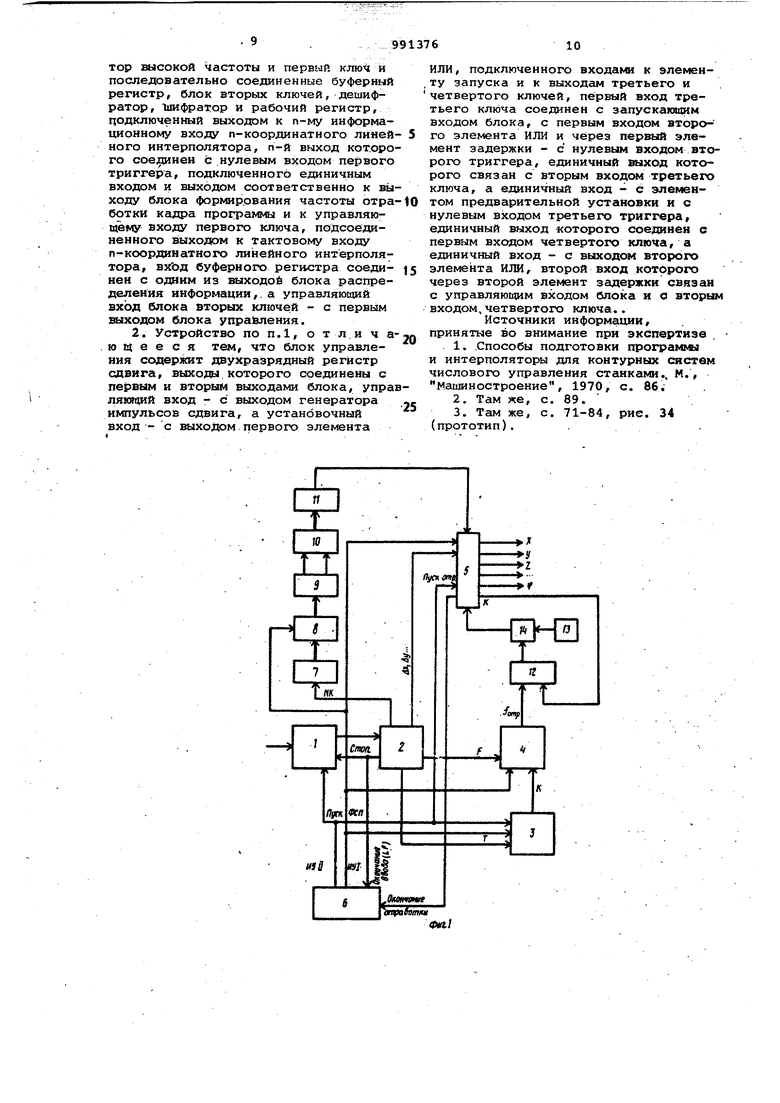
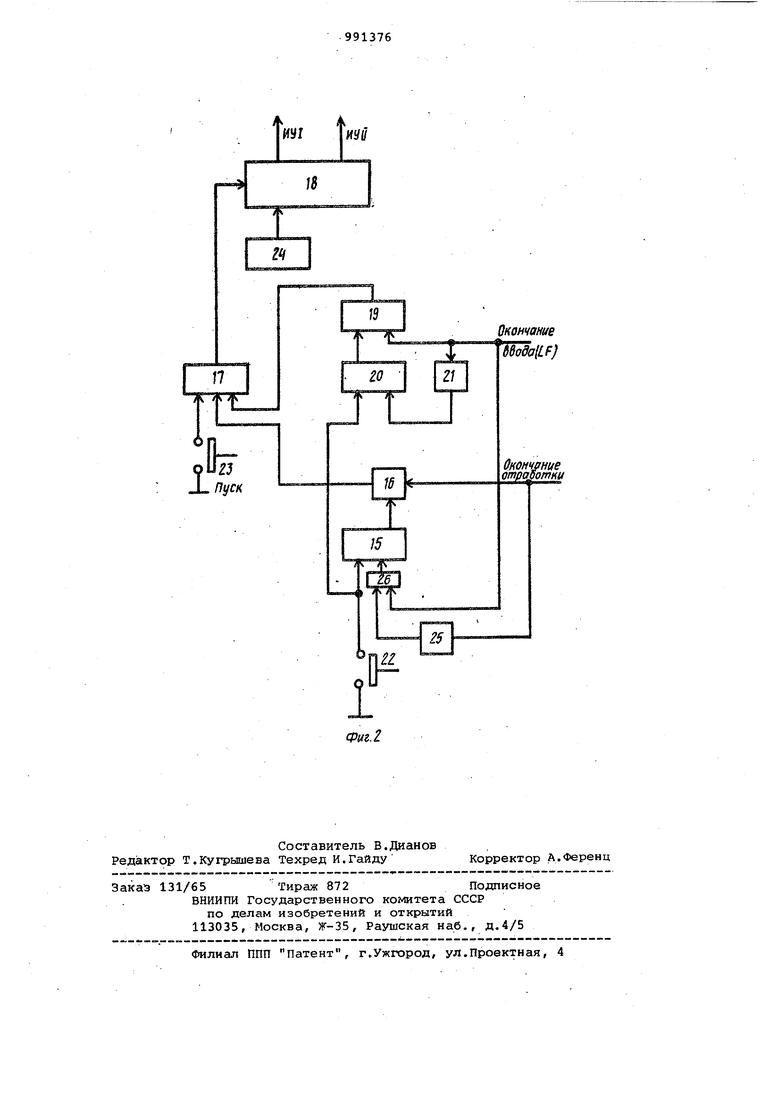
На фиг.1 представлена функциональ- с ная схема устройства на фиг.2 - схема блока управления.
Устройство содержит считывающий блок 1, блок 2 распределения информации (HanpHN p, дешифратор), блок 3 задания эталонной частоты, блок 4 фор- ° мирования частоты отработки кадра программы, п-координатный линейный
интерполятор 5, блок 6 управления, буферный регистр 7, блок 8 вторых
ключей, дешифратор 9 шифратор 10, 65
абочий регистр 11, первый триггер 12, генератор 13 высокой частоты и первый ключ 14.
Блок 6 содержит третий триггер 15, четвертый ключ 16, первый элемент ЛИ 17/ двухраэрядный регистр 18 сдвига, третий ключ 19, второй триггер 20, первый элемент 21 -задержки, элементы 22 и 23 соответственно предварительной установки и запуска, генератор 24 импульсов сдвига, второй элемент 25 задержки и второй элемент ИЛИ 26.
Устройство работает следующим образом.
Программа отработки детали вводится с помощью блока 1 и поступает на вход блока 2, который представляет собой дешифратор буквенно цифровых комбинаций, включая комбинацию LF конец кадра, который распределяет введенную информацию в соответствии с адресами следующим образом. Величина F, равная -, поступает в блок 4,
код торможения Т (если он задан) в блок 3, имеющий схему раз х он а : и торможения, величины приращенийАХ, AY , Д2, ..., Л Ч в интерполятор 5, номер коэф циента К, чтобы кодировать |«1огоразрядш:1е коэффициенты, в регистр 7. По окончаний ввода кадра блок 2 расшифровывает сигнал (конец кадра) и шдрабашвает сигнал LF, который останавливает блок 1 и запускает блок 6. Если был введен перк1й кадр программы, то блок 6 немедленно вырабатывает сигнал ИУ1,. который, поступая в блоки 3 и 4 и интерполятор 5, переписялвает введенную информацию из регистров промежуточной памяти в рабочую (не показаны), а поступая на блок 8, подключает код номера коэффициента NK к входам дешифратора 9, на одном из выходов коТОРОГО, соответствуквдем введенно- му Hottepy, появляется сигнал, пос- .
тупающий на вход шифратора 10, вызывает появление на его выходах кодо-; вой комбинации, соответствующей заданному коэффициенту, которая и записллвается в регистр 11 (памяти ведущей координаты) . Например, при , . В регистр 7 заносится код 5, а в регистр 11 записывается код 100.000.
После этого блок б вырабатывает сигнал ИУИ, который, поступая на блоки 3 и интерполятор 5, включает тработку введенного в рабочую память кадра программы и одновременно включает блок 1, который совместно с блоком 2 начинает вводить информацию следующего кадра в регистры промежуточной памяти блоков 3 и 4, интерпоятора 5 ив регистр 7.
Задающая частота с выхода блока 3 поступает на вход блока 4, на выноде которого формируется частота f-K-F, т.е. для выбранного конкретного К 100.000, forp 100.000F. Импульсы этой частоты, поступая на единичный вход триггера 12, устанавливают его в 1, при этом открывается ключ 14 и импульсы высокой частоты генератора 13 поступают на тактовый вход интерполятора 5,.который начинает отрабатывать заданный кадр, причем импульсы высокой частоты поступают на его вход до тех пор пока на выходе ведущей координаты не появится импульс, опрокидывгцоаий в О триггер 12. Следующий импульс с выхода блока 4 вновь устанавливает триггер 12. в 1 и включает высокую частоту. Так продолжается от окончания отработки кадра, причемп поскольку частоты на выходе блока ч и на выходе ведущей координаты интерполятора 5 одинаковы, а отработка заканчивается тогда, когда с выхода веду11:1ей коор-. динаты уйдет К импульсов, то очевидно, что устройство реализует предложенный метод, так как К импульсов, отработанных на частоте КР, дают К 1 время отработки , что и требовалось. Сигнал Окончание кадра /вырабатывается интерполятором 5 и по ступает на вход блок.а 6, который вырабатывает сигналы ИУ1, ИУ1I, и цикл работы повторяется. выходны сигналы других координат интерполято ра 5 как обычно поступают на входы устройства связи с привадами станка {не показаны). Блок б работает следующим образом (фиг.2). Первоначально нажимается элемент кнопка 22 предварительной установки и устанавливается триггер 15 в .О, а триггер 20 в 1. После этого нажимается элемент (кнопка) 23 запус ка и сигнал Пуск через элемент ИЛИ 17 поступает на вход регистра 18 и записывает его в младший разряд 1 Эта единица сдвигается импульсами частоты генератора 24, в результате чего на выходах регистра 18 фбрмируются импульсы ИУ1 и ИУН. Третьим импульсом генератора 24 регистр 18 обнуляется. По окончании ввода кадра появляется сигнал Окончание ввода (LF), Если введенный кадр сбыл первым кадром програмки, то триггер 20 находится в состоянии 1, поэтому этот сигнал проходит через ключ 19 и через элемент ИЛИ 17 на вход ре гистра 18 и запускает выработку сигналов ИУ1, ИУ1I, а через элемент 21 сбрасывает в О триггер 20. Если же введенный кадр программы не первый, то триггер 20 находится в состоянии О и ключ 19 закрыт, поэтому сигнал LF лишь устанавливает в 1 триггер 15. Сигнал Окончание отработки, поступающий после oTpa6ot«и кадра интерполятором, проходит через ключ 16, открытый единичным выходом триггера 15, и элемент ИЛИ 17 на вход регистра 18 и формирует сигралы ИУ1 , ИУИ, а через элемент 25 Ьбраснвает в О триггер 15. Такая логика допускает включение отработки следующего кадра по окончании отработки предыдущего только -в том случае, если закончился ввод информации предыдущего кода. При вводе первого кадра пуск его отработки осуществляется непосредственно по окончании его ввода, Преимущества данного технического решения заключаются в том, что, обладая быстродействием и точностью интерполятора, работающего по принципу оценочной функции, предлагаемое устройство для реализации способа задакия скорости допускает кодирование по методу G93, что чрезвычайно важно в многокоординатных системах при числе координат.больше 3, особенно в ряде специальных станков, когда использовать даэугие способы задания скорости не представляется возможным. Формула изобретения 1. Программное задающее устройство, содержащее блок управления, первый выход которого подключен к входам разрешения записи блока задания эталонной частоты, блока формирования частоты отработки кадра програм-. мы ип-координатного линейного интерполятора, запусканвдий вход которого coeOTiHeW с вторым выходом блока управления и с запускающими входами блока задания эталонной частоты и считывающего блока, подключенного выходом к входу блока распределения информации , выходы которого подключены к информационным входам блока задания эталонной частоты, блока формирования частоты отработки кадра программы и к п-1 информационным входам п-координатного линейного интерполятора, п-1 вь1ходов которого соединены с выходами устройства, а выход сигнала окончания интерполяции - с управляющим входом блока управления, подключенного запускающим входом к отключающему входу считывакицего блока и к одному из, выходов распределения информации, причем выход блока зада ния эталонной частоты соединен с тактовым входом блока формирования частоты отработки кадра программы, отли чающее ся тем, что, с целью повышения точности устройства, в него введены первый триггер, последовательно соединенные генератор клсокой частоты и первый и последовательно соединенные буферный регистр, блок вторых ключей, дешифратор, Тиифратор и рабочий регистр, подключенный выходом к п-му информационному входу п-координатного лиией ного интерполятора, п-й выход которо го с нулевым входом nejjBoro триггера, подключенного единичным входом и выходом соответственно к вы ходу блока формирования частоты отра ботки кадра программы и к управляющему входу первого ключа, подсоединенного выходом к тактовому входу п-координатного линейного интерполятора, вход буферного регистра соединем с одним из выходов блока распределения информации,, а управляющий вход блока вторых ключей - с первым выходом блока управления. 2. Устройство по П.1, о т ч a ю щ е е с я тем, что блок управления содержит двухразрядный регистр сдвига, выходи,которого соединены с первым и вторым выходами блока, упра ляющий вход - с выходом генератора импульсов сдвига, а установочный вход - с выходом первого элемента ИЛИ, подключенного входами к элементу запуска и к выходам третьего и четвертого ключей, первый вход третьего ключа соединен с запускающим входом блока, с первым входом второго элемента ИЛИ и через первый элемент задержки - с нулевым входом второго триггера, единичный шлход которого связан с вторым входом третьего ключа, а единичный вход - с элементом предварительной установки и с нулевым входом третьего триггера, единичный выход которого соединен с первым входом четвертого ключа, а единичный вход - с выходом второго элемента ИЛИ, второй вход которого через второй элемент задержки связан с управляющим входом блока и о вторым входом,четвертого ключа.. Источники информации, принятые во внимание при экспертизе 1..Способы подготовки программы и интерполяторы для контурных систем числового управления станками.. М., Машиностроение, 1970, с. 86. 2.Там же, с. 89. 3.Там же, с. 71-84, рие. 34 (прототип).
I t
