тегратор 5, выходной интегратор 7, электропривод 9, опорный элемент 10, усилителт- 11. В введены ключевой элемент 14, компаратор 15, развязывающий вентиль 16, сумматор 17, вьтрямитель 18, блок 19 памяти с ключом 20 сброса и нуль-компаратор 21. Изобретение обеспечивает форми-. рование оптимального закона изменения сигнала заданной скорости и его первой и второй производных - заданных ускорения и рывка. Необходимая
I
Изобретение относится к электро-- технике, а именно к управлению электроприводами механизмов, пуск и замедление которых должны производиться плавно, с ограничением ускорения и рьтка (например, р1удничных подъемных установок, скоростных лифтов, маятниковых пассажирских канатных дорог),
Цель изобретения - повышение быс- тродействия путем обеспечения опти мального закона изменения выходного сигнала при небольших приращениях входного сигнала задающего устройства.
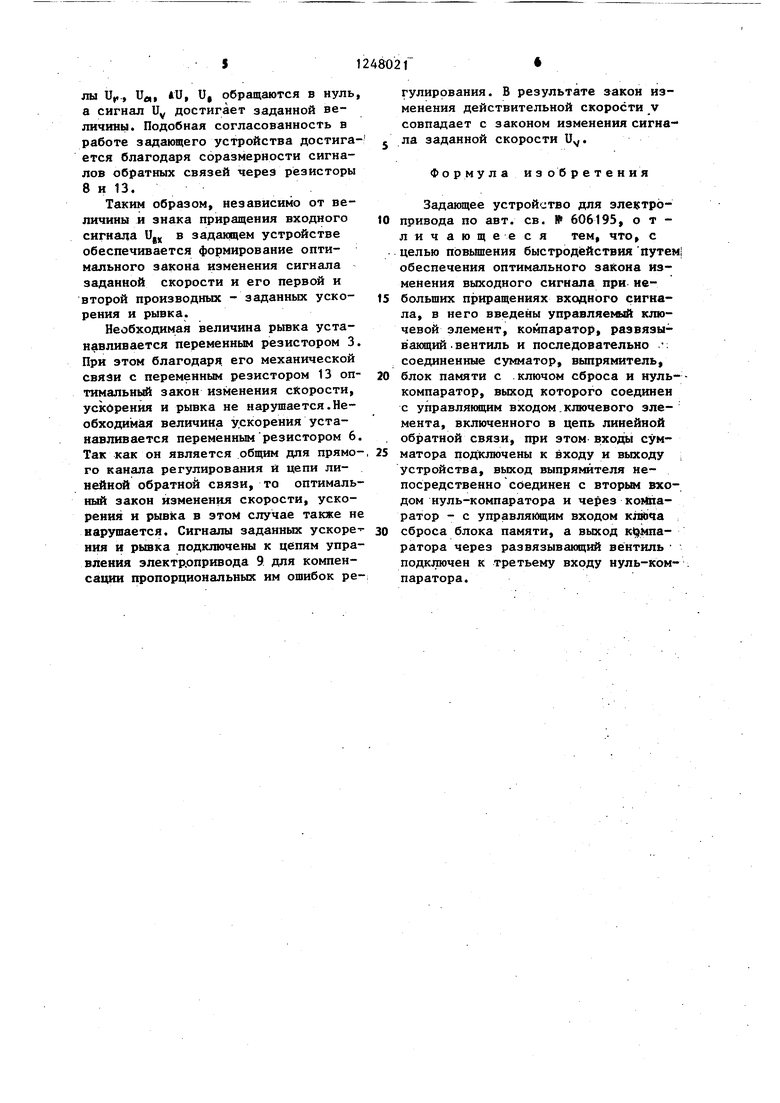
На фиг. 1 приведена схема задающего устройства; на фиг. 2 - характер изменения формируемых в задающем устройстве сигналов управления дпя случаев, когда сигнал заданного ус- корения не достигает максимальной величины (сплошные линии) и когда он ее достигает (штриховые линии).
Задакщее устройство для электропривода (фиг. 1) содержит последова- тельно соединенные усилитель 1 с резистором 2 на входе, переменным резистором 3 на выходе и опорным элементом 4 в цепи обратной связи, промежуточный интегратор 5, нагружен- ный переменным резистором 6, и вькод ной интегратор 7, выход которого подключен к входу усилителя 1 через резистор В и к цепям управления электропривода 9. Усилитель 1 и интегратор 5 охвачены нелинейной обратной связью через опорный элемент 10 и
величина рывка устанавливается резистором 3 благодаря его механической связи с резистором 13, оптимальный закон изменения скорости, ускорения и рывка не нарушается. Сигналы заданных ускорения и рывка подключены к цепям управления электропривода 9 для компенсации пропорциональ ных им ошибок регулирования. При этом закон изменения действительной скорости совпадает с законом изме- . нения сигнала заданной скорости. 2 ил.
линейной обратной связью, состоящей из инвертирующего усилителя 11 с .переменным резистором 12 на вькоде и резистора 13. Подвижные контакты переменных резисторов 3 и 12 механически соединены и также подключены к цепям управления электропривода 9.
Устройство содержит также управ- ляемьш ключевой элемент 14, компаратор 15, развязьшающий вентиль 16 и последовательно соединенные сумматор 17, выпрямитель 18, блок 19 памяти с ключом 20 сброса и нуль-компаратор 21, выход которого соединен с управляющим входом ключевого элемента 14, включенного в цепь линейной обратной связи, при этом входы сумматора 17 подключены к входу и выходу, устройства, выход выпрямителя 18 непосредственно соединен с вторым входом нуль-компаратора 21 и через компаратор 15 - с управляющим входом ключа 20 сброса блока 19 памяти, а выход компаратора 15 через развязывающий вентиль 16 подключен к третьему входу нуль-компаратора 21.
На фиг. 1-2 обозначены действительная скорость V механизма, сигналы управле-ния: входной U, устройства, заданного рывка U,, заданного ускорения Ua, заданной скорости U выходной Аи сумматора, выходной U выпрямителя, выходной Ц, узла памяти, выходной нуль-компаратора, выходной и компаратора и фиксированные моменты времени t,.. .,tg.
Устройство работает следующим образом.
В исходном состоянии (т.. е. в установившемся режиме работы задающего устройства) сигналы U, U,
AU, Ug, и„
о - я , сигнал и.,
JM Рэвны нулю, положителен, а сигнал Иц отрица- телен. Ключ 20 замыкается положительным и размыкается отрицательным сигналом и элемент
и размыкается положительным сигналом 11, . Поэтому в исходном состоянии они замкнуты. Если в момент времени tj, произошло ступенчатое измек, а управляемый ключевой 14 замыкается отрицател1 ным
нение сигнала U, то мгновенно по- по линейному закону сигналы U, aU являются сигналы и„, аи U«..-Uv, и и одновременно становятся равныГ
J. Так как компаратор 15 имеет вы20
30
и
сокую чувствительность к сигналу U, то даже при малой его величине полярность сигнала U меняется с положительной на отрицательную и ключ 20 раз№1кается. Поэтому на выходе блока 19 -памяти устанавливается постоянный сигнал и„, равный по величи-
не максимальному значению сигнала Ug и противоположный ему по знаку. Чувствительность нуль-компаратора 21 к сигналу Uj вдвое вьш1е, чем к сигналу и„. Поэтому полярность сигнала и„ меняется с отрицательной на положительную и ключевой элемент 14 размыкается. Под действием сигнала и,, сигнал Ua начинает возрастать во времени по линейному закону, а сиг- 35 нал Uy - по параболическому закону с возрастающей интенсивностью. В.результате начинают уменьшаться сиг.- налы aU и Uj. К моменту времени t. сигнал Uj уменьшается вдвое, сигнал Ujj, сохраняющийся постоянным, начинает преобладать на входе нуль-компаратора 21 и на его выходе вновь устанавливается отрицательньй сигнал. Поэтому ключевой элемент 14 замыка- 45 ется и на вход усилителя 1 через резистор 13 подается сигнал обратной связи, которьй арифметически суммируется с сигналом обратной связи через резистор 8. Сигналы обратных свя-50 зей через резисторы 8 и 13 соразмерены между собой и по отношению к входному сигналу через резистор 2 из условия получения оптимального переходного процеЬса. Поэтому, если 55 .ступенчатое изменение сигнала Ug Относительно невелико и к моменту ;времени t сигнал U-, не успевает дос-
ми нулю в момент времени t. Посколь ку соотношение сигналов Ug.H Uy на входах сумматора 17 и усилителя 1 принято одинаковым, то в момент времени t,j становится равным нулю сигнал Vf. В результате переходный процесс в устройстве прекращается и наступает установившийся режим. В процессе уменьшения сигнала U. при достаточно малой его величине в момент времени tit, вновь устанавливается положительный сигнал U, ключ 20 замыкается, и сигнал и„ сбрасывается на нуль.-Однако сигнал U по- прежнему остается отрицательным благодаря поступлению на вход нуль-компаратора 21 положительного сигнала и через развязывающий вентиль 16.
Если ступенчатое изменение сигнала и.., в момент времени t значиBJS
тельно и сигнал Ug успевает достичь максимального значения, то замыкание ключевого элемента 14 (момент времени t. ) не вызывает каких-либо изменений в работе задающего устройства и процессы в нем протекают так, как если бы этот ключ был постояннее замкнут. В этом случае в момент времени t, вступает в работу обратная связь через опорньй элемент 10 и сигнал Upюбращается в нуль, а в Момент времени tj благодаря возрастанию сигнала Uy сумма токов обратных связей через резисторы 8 и 13 превосходит по величине входной ток через резистор 2 и сигнал Uf. появляется вновь, но противоположной
полярности, в результате сигнал U начинает уменьшаться по линейному закону и в момент времени tg сигна
тичь определяемого опорньм элементом 10 максимального значения, то в момент замыкания ключа 14 суммарный сигнал обратных связей больше входного сигнала. В результате знак сигнала Uf, изменяется на противоположный и сигнал Up, начинает уменьшаться во времени по линейному закону, а сигнал Uy продолжает возрастать по параболическому закону, но с убывающей интенсивностью. Так как в процессе увеличения сигнала Ujj по линейному закону сигналы 4U и Uj уменьшаются наполовину, то в процессе уменьшения сигнала U также
по линейному закону сигналы U, aU и и одновременно становятся равны0
0
5
-
ми нулю в момент времени t. Поскольку соотношение сигналов Ug.H Uy на входах сумматора 17 и усилителя 1 принято одинаковым, то в момент времени t,j становится равным нулю сигнал Vf. В результате переходный про. цесс в устройстве прекращается и наступает установившийся режим. В процессе уменьшения сигнала U. при достаточно малой его величине в момент времени tit, вновь устанавливается положительный сигнал U, ключ 20 замыкается, и сигнал и„ сбрасывается на нуль.-Однако сигнал U по- прежнему остается отрицательным благодаря поступлению на вход нуль-компаратора 21 положительного сигнала и через развязывающий вентиль 16.
Если ступенчатое изменение сигнала и.., в момент времени t значиBJS
тельно и сигнал Ug успевает достичь максимального значения, то замыкание ключевого элемента 14 (момент времени t. ) не вызывает каких-либо изменений в работе задающего устройства и процессы в нем протекают так, как если бы этот ключ был постояннее замкнут. В этом случае в момент времени t, вступает в работу обратная связь через опорньй элемент 10 и сигнал Upюбращается в нуль, а в Момент времени tj благодаря возрастанию сигнала Uy сумма токов обратных связей через резисторы 8 и 13 превосходит по величине входной ток через резистор 2 и сигнал Uf. появляется вновь, но противоположной
полярности, в результате сигнал U начинает уменьшаться по линейному закону и в момент времени tg сигналы и., и,, и, и, обращаются в нуль, а сигнал Uy достигает заданной величины. Подобная согласованность в работе задающего устройства достигается благодаря соразмерности сигналов обратных связей через резисторы 8 к 13.
Таким образом, независимо от величины и знака приращения входного сигнала Ug в заданием устройстве обеспечивается формирование оптимального закона изменения сигнала заданной скорости и его первой и второй производных - заданных ускорения и рывка.
Необходимая величина рывка устанавливается переменным резистором 3. При этом благодаря, его механической связи с переменным резистором 13 оптимальный закон изменения скорости, ускорения и рывка не нарушается.Необходимая величина ускорения устанавливается переменным резистором 6. Так как он является общим для прямого канала регулирования и цепи линейной обратной связи, то оптимальный закон изменения скорости, ускорения и рывка в этом случае также не нарушается. Сигналы заданных ускоре- ния и рывка подключены к цепям управления электр.опривода 9 для компенсации пропорциональных им ошибок регулирования. В результате закон изменения действительной скорости v совпадает с законом изменения сигна- J ла заданной скорости U.
Формула изобретения
Задающее устройство для эле1 :тр60 привода по авт. св. 606195, отличающееся тем, что, с целью пЬвьш1ения быстродействия путем обеспечения оптимального закона изменения выходного сигнала при не5 больших приращениях входного сигнала, в него введены управляемый ключевой элемент, компаратор, развязы- в аняций . вентиль и последовательно : соединенные сумматор, выпрямитель,
0 блок памяти с .ключом сброса и нуль-- компаратор, выход которого соединен с управляющим входом.ключевого элемента, включенного в цепь линейной . обратной связи, при этом входы сум5 матора подключены к входу и выходу устройства, выход выпрямителя непосредственно соединен с вторым входом нуль-компаратора и через коМпа- ратор - с управлякйцим входом клйча
0 сброса блока памяти, а выход ратора через развязывающий вентиль подключен к третьему входу нуль-компаратора.
Ur
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для точного останова электропривода | 1985 |
|
SU1272447A1 |
| Задающее устройство системы тиристорного управления электроприводом постоянного тока | 1987 |
|
SU1417143A2 |
| Задающее устройство для электропривода | 1975 |
|
SU606195A1 |
| Устройство для управления подъемной машиной | 1985 |
|
SU1331784A1 |
| Устройство формирования программы работы электропривода шахтной подъемной установки | 1987 |
|
SU1578077A1 |
| Электропривод шахтной подъемной машины | 1984 |
|
SU1277332A1 |
| Устройство задания режима движения шахтной подъемной установки | 1986 |
|
SU1406110A1 |
| Позиционный электропривод постоянного тока | 1984 |
|
SU1246313A1 |
| Задатчик управляющего напряжения для электроприводов подъемно-транспортных механизмов | 1976 |
|
SU600680A1 |
| Задающее устройство системы управления электроприводом | 1986 |
|
SU1381674A1 |
Изобретение относится к электротехнике, может быть использовано , в области управления электроприводами и является дополнительным к авт. св. № 606195. Цель изобретения - повышение быстродействия путем обес- печения оптимального закона изменения выходного сигнала при неболь- йих приращениях входного сигнала задакнцего устр-ва. Устр-во содержит усилитель 1, опорный элемент 4 в цепи обратной связи, промежуточньй.ини«л 2 (Л Ю 4 U) ри. 1 Го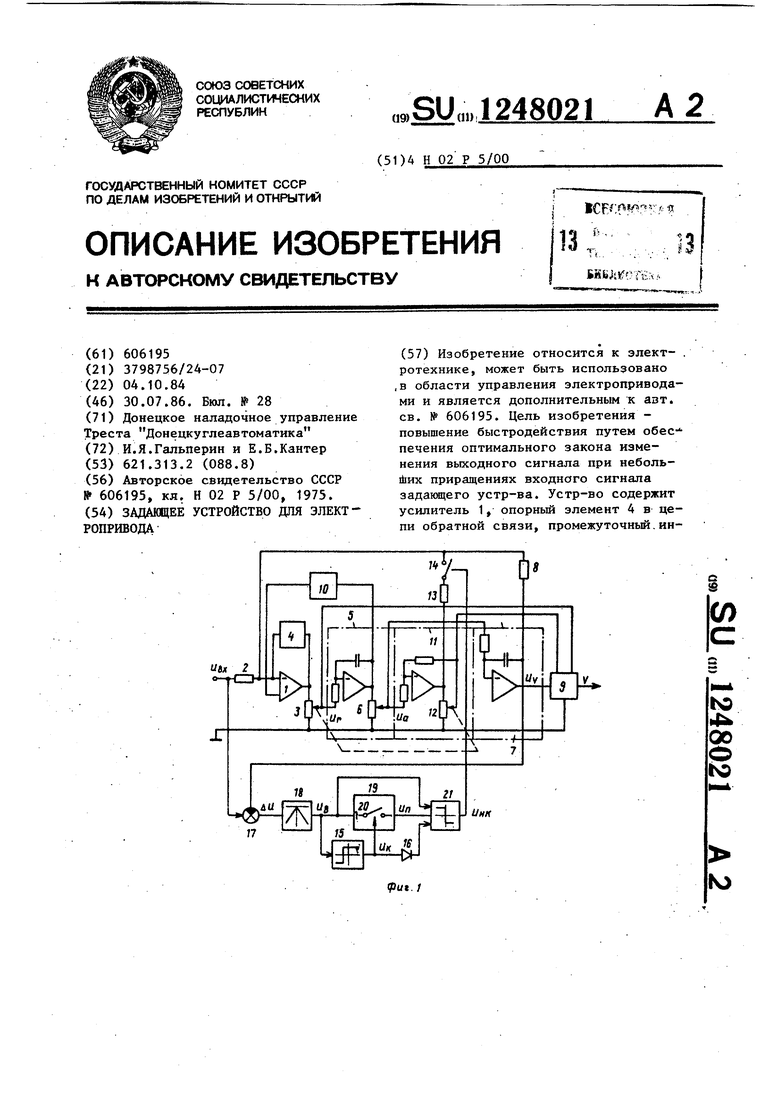
X
X
Ч.
«, . «г fj j
. 2
Составитель В.Кузнецова Редактор А.Лежнина Техред Л.Сердюкова Корректор И.Муска
Заказ 4138/56 Тираж 631Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,--4
1
| Задающее устройство для электропривода | 1975 |
|
SU606195A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
