оно дополнительно содержит второй коммутатор, блок памяти и сумматор, входы которого соединены соответственно с выходами блока деления и интегратора эталона скорости, а выход - с первым входом блока памяти, второй вход которого соединен с первым входом второго коммутатора
1
Изобретение относится к регулиро- ванию процессов прокатки полосы и предназначено для управления скоростью станов холодной прокатки.
Цель изобретения - повышение прои водительности стана и качества проката за счет стабилизации выхода на заданное значение скорости, а также расширение эксплуатационных возможностей устройства за счет обеспе- чения реализации режима Так держать
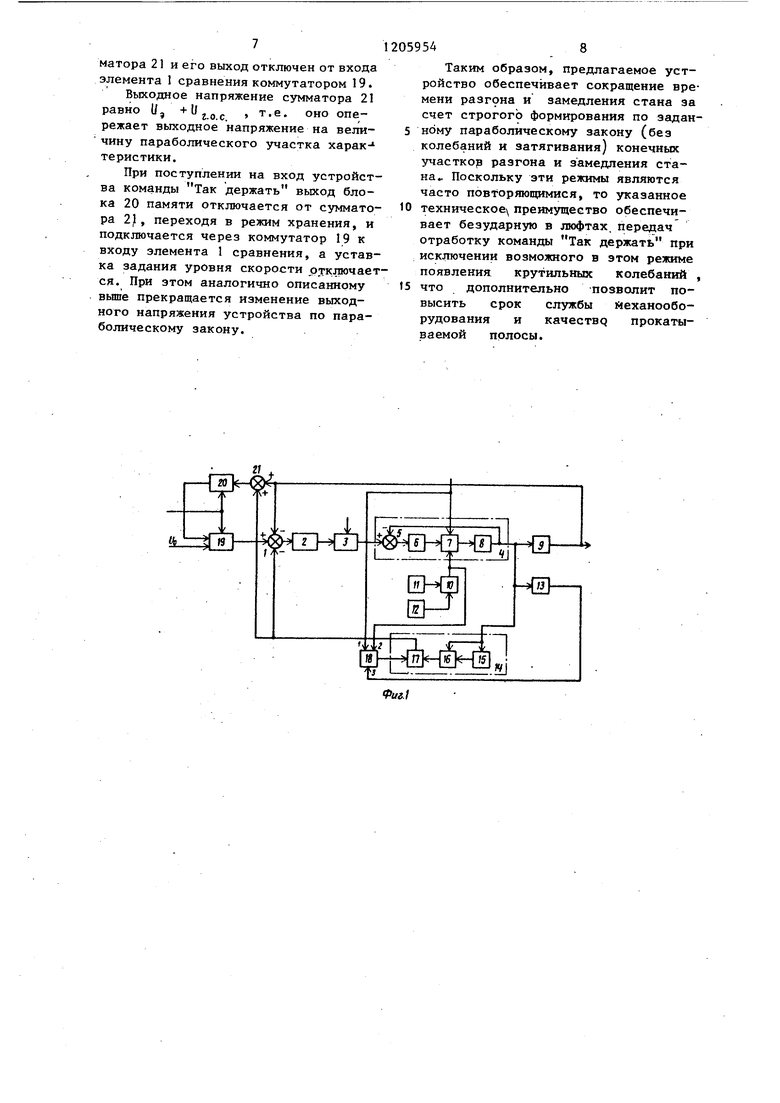
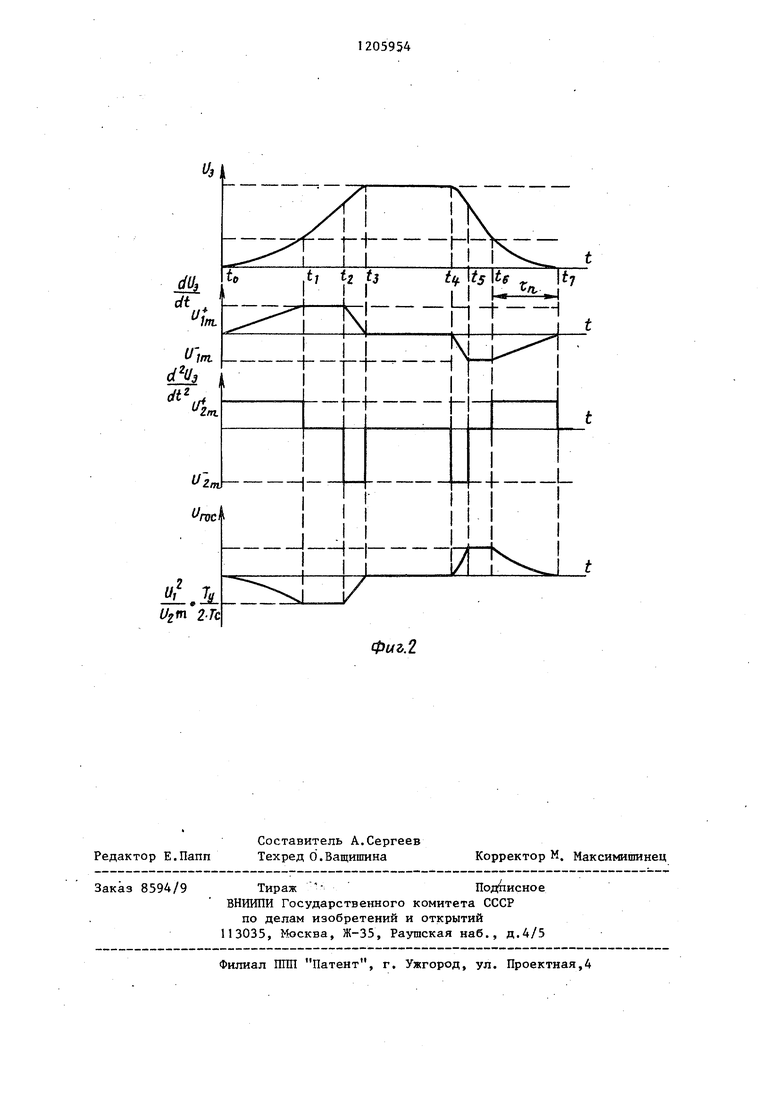
На фиг. приведена структурная схема предлагаемого устройства; на фиг. 2 - диаграммы, изменений напряжения на выхрдах основных блоков и выходе устройства при разгоне и замедлении стана.
Устройство содержит последовательно соединенные элемент 1 сравнения, усилитель 2 рассогласования эталона скорости, блок 3 регулируемого ограничения эталона ускорения и блок 4 формирования эталона ускорения, содержащий последовательно соединенные и охваченные общей отрицательной обратной связью вто- рой элемент 5 сравнения, усилитель 6 рассогласования эталона ускорения, блок 7 регулируемого ограничения эталона производной ускорения и ин- тегратор 8 эталона ускорения.
К выходу интегратора 8 эталона ускорения подсоединен интегратор 9 эталона скорости, выход которого соединен с первым входом элемента 1 сравнения и с выходом устройства. С вторым входом блока 7 регулируемого ограничения эталона производной ускорения соединеньР через блок 1 умножения задатчики 11 птрины и 12 толщины проката. К выходу блока 4 формирования эталона ускорения подсоединены входы компаратора 13 уз1205954
и является входом для подачи команды Так держать, выход блока памяI ти соединен с вторым входол второго коммутатора, третий вход которого является входом уставки задания скорости, а его выход соединен с входом первого элемента сравнения.
ла 14 гибкой обратной связи, состоящего из последовательно соединенных блока 15 выделения модуля, блока 16 умножения и блока 17 деления, вход блока 15 выделения модуля и второй вход блока 16 умножения соедрмены между собой и являются входом узла 1 гибкой обратной связи, эторой вход блока 17 деления соединен с выходом коммутатора 18, первый вход которого соединен с третьим входом блока 7 регулируемого ограничения эталона производной ускорения, на который подается уставка эталона отрицательной производной ускорения, второй вход - с выходом блока 10 умножения и третий вход - с выходом компаратора 13. Выход узла 14 гибкой обратной связи (выход его блока 17 деления) соединен с вторым входом первого элемента 1 сравнения, на третий вход которого подается либо сигнал уставки уровня скорости, либо в варианте исполнения с реализацией режима Так держать -одноименный сигнал (фиг. 1) .Два входа второго коммутатора 19 соединены соответственно с выходом и первым входом блока 20 памяти, к второму входу которого подсоединен выход сумматора 21, входы . которого соединены с выходами соответственно блока 17 деления и интегратора 9 эталона скорости, при этом на третий вход коммутатора 18 подается сигнал уставки задания скорости, а на объединенные входы коммутатора 19 и блока 20 памяти сигнал Так держать, например, с внешнего командного устройства.
Элементы 1 и 5 сравнения, блок 3 регулируемого ограничения эталона ускорения, блок 4 формирования эта3
лона ускорения, интеграторы 8. и 9 эталонных значений, блоки 10 и 16 умножения могут быть реализованы на микросхемах К140 УД 8 по известным схемам. Усилители 2 и 6 рассогласования, компаратор 13 и сумматор 21 могут быть-реализованы на базе операционного усилителя, делитель 20 - на базе делителя аналоговых сигналов, коммутаторы 18 и 19,например, с помощью реле, имеющего замыкающий и размыкающий контакты. Задатчики 11 и 12 могут быть выполнены на делителях напряжения. Блок 15 вьщеления модуля можно вьтолнить в виде последовательной цепочки из инвертора и диода, зашунтированной вторым встречно включенным диодом.
Устройство работает следующим образом.
Перед ускорением стана на задат- чиках 11 и 12 выставляются уставки толщины и щирины прокатьшаемой полосы, при этом на выходе умножителя 10 формируется сигнал, пропорциональный поперечному сечению прокатываемой полосы, который поступает в качестве задания уровня ограничения положительной производной ускорения на второй вход блока 7 регулируемого ограничения эталона производной ускорения и на второй вход коммутатора 18. На третий вход блока 7 и на Первый вход коммутатора 18 подается уставка уровня ограничения эталона отрицательной производной ускорения, которая определяется из условия безударного,выхода стана на установившздася скорость.
Пуск стана осуществляется подачей на вход коммутатора 19 сигнала задания скорости поокатки Uo при отсутствии команды Так держать
сигнал (Jg поступает на вход элемента 1 сравнения). За счет большого коэффициента усиления усилитель 2 насьш|ается, при этом на входе блока 4 формирования эталона ускорения устанавливается постоянный уровень напряжения, определяемый уровнем ограничения блока 3 регулируемого ограничения эталона ускорения, уставка которого выбирается исходя из допустимого тока двигателей электроприводов стана.
Под действием выходного сигнала блока 3 ограничения эталона ускорения, который поступает в блок 4 формирования, эталона ускорения на
059544
вход элемента 5 сравнения, насыщает - ся усилитель 6 рассогласования эталона ускорения и на входе интегратора 8 эталона ускорения устанавли- с вается постоянное положительное напряжение, определяемое уровнем ограничения (в функцил сечения полосы) блока 7 регулируемого ограничения эталона производной ускорения. Напряжение на выходе интегратора 8 растет по линейному закону, а вьпсод- ное напряжение интегратора 9 меняет- ся по параболическому закону (ip-t, , фиг. 2) в соответствии с выраже(1ием t
10
15
U,
|и ( i Ч Тс 2
(1)
где и
Zm
ТуИТ,
уровень положительного ограничения блока 7 ограничения эталона производной ускорения, пропор- цианальный сечению прокатываемой полосы; постоянные времени интегрирования соответственно интеграторов 8 эталона ускорения и 9 эталона скорости.
В момент равенства выходного сигнала интегратора 8 и выходного сигнала блока 3 регулируемого ограничения эталона ускорения напряжение на выходе интегратора 9 начинает расти линейно С ,Фиг.2) в соответствии с выражением
п I U, -ir- t
э
где и
Чл
уровень положительного ограничения блока 3 ограничения эталона ускорения (определяется допустимым током двигателей привода стана).
При достижении эталоном скорости (J, значения, близкого к значению разности 1/0 - Ujp.e (Иго.с - выходное напряжение узла 14 гибкой обратной связи),усилитель 2 рассогласования эталона скорости выходит из ограничения (что соответствует началу замыкания внешнего контура) и напряжение на его выходе и на выходе блока 3 ограничения начинает уменьшаться. Под действием сигнала обратной связи усилитель 6 насыщается (i, -ij , фиг. 2j, однако напряжение на его выходе имеет полярность, обратную полярночти при начале разs
гона. При этом на входе интегратора 8 устанавливается отрицательное напряжение, величина которого опре- деляется уровнем отрицательного ограничения блока 7, напряжение на выходе интегратора 8 уменьшается и меняется линейно (фиг. 2) по характеристике
,,
где 1 - время в интервале По выходу сигнала интегратора 8 узел 14 гибкой обратной связи фор- , мирует (на выходе своего блока 17 деления)напряжение в соответствии с выражением
12059546
вход коммутатора 19. В этом случае при отсутствии команды Так держать |работа устройства происходит анало- гично разгону.
5 Отличие заключается в полярности выходных сигналов усилителей 2 и 6 блока 3 регулируемого ограничения и интегратора 8 эталона ускорения. Вид кривой замедления показан на 10 фиг. 2 (участок i4
На участке i - iy выходное напряжение устройства меняется по параболическому закону
2М ,, . v2
5
Ч с
г /1 1. J
и;
1,1
u.nr-IUftl Ug- K -
f-.O-C о о I |- -J-
1м у
%а-ч., Ч
t - время в интервале i., -i
где
К - коэффициент пропорциональности, равный ч 25 Циент параболы К
где i - время в интервале . Следовательно, характеристика на начальном участке замедления иден- (2) 20 тична характеристике на конечном участке разгона (выражение (З) и значение коэффициента К в выраже- J НИИ (2) опреде11ено верно. КоэффиИгм
п
2Ту .Т,
на этих
гтс
Компаратор 13 по знаку выходного сигнала интегратора 8 определяет то какой переходный процесс идет (разгон или замедление, и в соответствии с этим подключает через коммутатор 18 н вход Делитель блока 17 деления либо сигнал (12м Г1РИ разгоне) , либо (при замедлении).
Напряжение на выходе узла 1 срав- нения для режима выхода Ug на заданный уровень записывается в виде
и
Uo-Ur to.c
Uo-U,,)
Г
(участок t, -ij)
Внешний контур начинает замыкаться при УCJJOBИИ
и,-ио-, i I ij I С
После начала замыкания внешнего контура, как только начинает уменьшаться напряжение на выходе интегратора 8, в качестве задания уже выступает растущ&я по требуемой параболе (до величины UK в момент времени i t3) величина Ug-U ,
Таким образом, колебательное звено отрабатывает -не скачкообразное и менение задания скорости, а параметрически расчитанное параболич:еское.
Замедление стана осуш;ествляется подачей нулевого задания на первый
2059546
вход коммутатора 19. В этом случае при отсутствии команды Так держать |работа устройства происходит анало- гично разгону.
5 Отличие заключается в полярности выходных сигналов усилителей 2 и 6 блока 3 регулируемого ограничения и интегратора 8 эталона ускорения. Вид кривой замедления показан на 10 фиг. 2 (участок i4
На участке i - iy выходное напряжение устройства меняется по параболическому закону
2М ,, . v2
5
Ч с
Циент параболы К
Игм
п
2Ту .Т,
на этих
участках определяется требованием безударного в лгрфтах передач окончания разгона и начала замедления и задается .величиной отрицательног ограничения блока 4. На участке fcj б выходное напряжение устройства меняется линейно в соответствии с выражением
и
.u,-..i,
f
где
Чм
- уровень отрицательного
ограничения блока 3. На участке -t - i выходное напряжение устройства меняется по параболическому закону вида
и
(4)
п (.
где {, - время в интервале bj-tj. Как видно из выражения (4|, оно идентично выражению (l), т.е. вид характеристики на начальном участке разгона и конечном участке замедления идентичен. Коэффициент парабол К на этих участках определяется сечением прокатьгоаемрй .полости и задается .величиной положительного ограничения блока 7 с выхода блока 10 умножения.,
При отсутствии команды Так держать блок 20 памяти работает в режиме записи выходного напряжения сум7
матора 21 и его выход отключен от входа элемента 1 сравнения коммутатором 19.
Выходное напряжение сумматора 21 равно I/, г.о с °н° опережает выходное напряжение на величину параболического участка харак- теристики.
При поступлении на вход устройства команды Так держать выход блока 20 памяти отключается от сумматора 21, переходя в режим хранения, и подключается через коммутатор 19 к входу элемента 1 сравнения, а уставка задания уровня скорости отключается. При этом аналогично описанному выше прекращается изменение выходного напряжения устройства по параболическому закону.
059548
Таким образом, предлагаемое устройство обеспечивает сокращение времени разг9на и замедления стана за счет строгого формирования по задан5 ному параболическому закону (без колебаний и затягивания) конечных участкор разгона и замедления стана.. Поскольку эти режимы являются часто повторяющимися, то указанное
10 техническое преимущество обеспечивает безударную в люфтах, передач отработку команды Так держать при исключении возможного в этом режиме появления крутильных колебаний ,
15 что дополнительно позволит повысить срок службы йеханообо- рудования и качествд прокатываемой полосы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления скоростью прокатного стана | 1980 |
|
SU942837A1 |
| Устройство для задания скорости электропривода | 1977 |
|
SU738077A1 |
| Устройство управления реверсивной клетью кварто | 1981 |
|
SU1024132A1 |
| Устройство для задания скорости главного привода реверсивного стана горячей прокатки | 1980 |
|
SU904166A1 |
| Устройство автоматического управления скоростью агрегата для обработки рулонных материалов | 1976 |
|
SU601061A1 |
| Устройство для точного останова электропривода | 1985 |
|
SU1272447A1 |
| Устройство для управления накопителем полосы | 1989 |
|
SU1735810A2 |
| Устройство для автоматического управления скоростью реверсивного стана холодной прокатки | 1976 |
|
SU655444A1 |
| Регулятор температуры полосы на выходе стана горячей прокатки | 1977 |
|
SU716659A1 |
| Устройство для управления скоростью клети реверсивного стана холодной прокатки | 1981 |
|
SU1202649A1 |
Редактор Е.Папп
Составитель А.Сергеев Техред О.Ващишина
8594/9
Тираж Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Филиал ШШ Патент, г. Ужгород, ул. Проектная,4
0ws.2
Корректор М. Максимишинец
| Устройство автоматического управления скоростью агрегата для обработки рулонных материалов | 1976 |
|
SU601061A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство автоматического управления скоростью прокатного стана | 1980 |
|
SU942837A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
